一种车辆加速状态的平滑过渡控制方法及装置与流程
本发明涉及汽车,尤其涉及一种车辆加速状态的平滑过渡控制方法及装置。
背景技术:
1、自适应巡航控制(adaptive cruise control,acc)系统,是新一代汽车驾驶员辅助驾驶系统。通过利用轨迹预测和计算需求加速度等技术,来帮助驾驶员进行定速巡航行驶、自动跟车行驶、起步以及刹停等操作。其中,在自适应巡航控制功能模式中,存在驾驶员主动加速状态,即当驾驶员主动踩加速踏板时的需求加速度大于acc系统计算的需求加速度。
2、目前,当驾驶员主动加速状态结束后,车辆会立即回到自适应巡航控制模式,由acc系统计算的需求加速度来控制车辆的加减速,若由驾驶员主动加速状态切换至自适应巡航控制模式的过程中缺乏平滑过渡策略,则可能会导致车辆出现推背感、减速分段感等舒适性较差问题。
技术实现思路
1、鉴于上述问题,本发明提供一种车辆加速状态的平滑过渡控制方法及装置,主要目的是为了解决现有技术中当驾驶员主动加速状态结束后,车辆回到自适应巡航控制模式时缺乏过渡状态导致的车辆舒适性较差问题。
2、为解决上述技术问题,本发明提出以下方案:
3、第一方面,本发明提供了一种车辆加速状态的平滑过渡控制方法,所述方法包括:
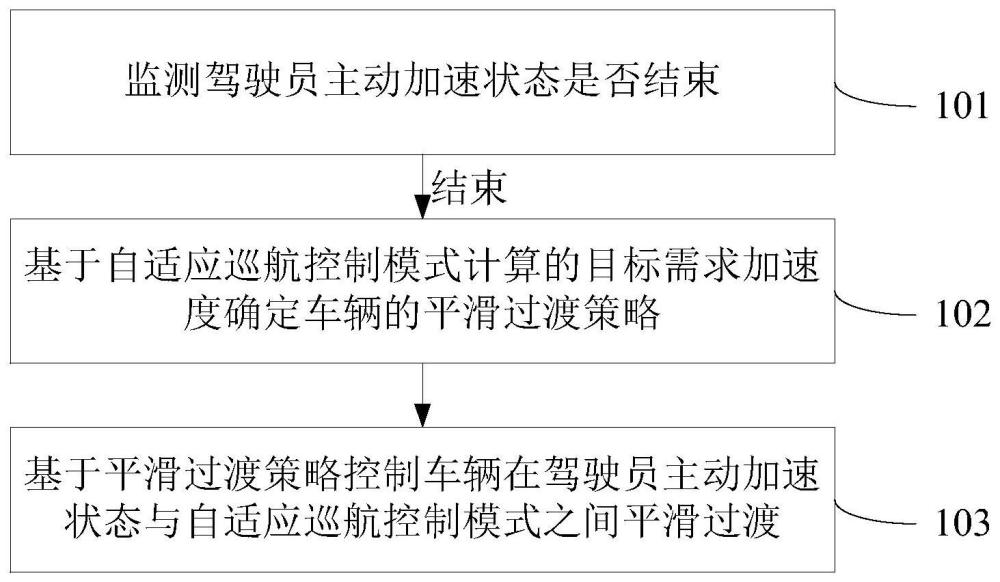
4、监测驾驶员主动加速状态是否结束;
5、若结束,则基于自适应巡航控制模式计算的目标需求加速度确定车辆的平滑过渡策略;
6、基于所述平滑过渡策略控制车辆在所述驾驶员主动加速状态与所述自适应巡航控制模式之间平滑过渡。
7、第二方面,本发明提供了一种车辆加速状态的平滑过渡控制装置,所述装置包括:
8、状态监测单元,用于监测驾驶员主动加速状态是否结束;
9、策略确定单元,用于若状态监测单元监测到驾驶员主动加速状态结束,则基于自适应巡航控制模式计算的目标需求加速度确定车辆的平滑过渡策略;
10、过渡控制单元,用于基于所述策略确定单元确定的平滑过渡策略控制车辆在所述驾驶员主动加速状态与所述自适应巡航控制模式之间平滑过渡。
11、为了实现上述目的,根据本发明的第三方面,提供了一种存储介质,所述存储介质包括存储的程序,其中,在所述程序运行时控制所述存储介质所在设备执行上述第一方面的车辆加速状态的平滑过渡控制方法。
12、为了实现上述目的,根据本发明的第四方面,提供了一种处理器,所述处理器用于运行程序,其中,所述程序运行时执行上述第一方面的车辆加速状态的平滑过渡控制方法。
13、借由上述技术方案,本发明提供的一种车辆加速状态的平滑过渡控制方法及装置,该方法可以实时监测驾驶员的主动加速状态,一旦该状态结束,会立即利用自适应巡航控制模式计算的目标需求加速度来精确地确定车辆的平滑过渡策略。通过应用该策略,可以确保车辆在驾驶员主动加速状态到自适应巡航控制模式的转换过程平稳,这不仅有助于消除推背感、减速分段感等不良驾驶体验,还显著提升了整体的驾驶舒适度。更重要的是,应用此平滑过渡策略还可以降低突然加速或减速引发的潜在安全风险,从而提高了道路行驶的安全性。总结来说,该方法成功地在驾驶员主动加速状态和自适应巡航控制模式之间实现了平滑过渡,为驾驶员提供了更为智能、安全、舒适的驾驶环境。
14、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术特征:
1.一种车辆加速状态的平滑过渡控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,基于自适应巡航控制模式计算的目标需求加速度确定车辆的平滑过渡策略,包括:
3.根据权利要求2所述的方法,其特征在于,基于所述目标需求加速度在所述多个预设平滑过渡策略中匹配车辆的目标平滑过渡策略,包括:
4.根据权利要求3所述的方法,其特征在于,基于所述平滑过渡策略控制车辆在所述驾驶员主动加速状态与所述自适应巡航控制模式之间平滑过渡,包括:
5.根据权利要求4所述的方法,其特征在于,基于所述第二平滑过渡策略控制车辆在所述驾驶员主动加速状态与所述自适应巡航控制模式之间平滑过渡,包括:
6.根据权利要求1-5中任一项所述的方法,其特征在于,所述方法还包括:
7.根据权利要求3-5中任一项所述的方法,其特征在于,所述需求加速度变化率限值为需求加速度变化率的限值,所述需求加速度变化率为当前周期需求加速度与上一周期的最终输出需求加速度的差值。
8.一种车辆加速状态的平滑过渡控制装置,其特征在于,所述装置包括:
9.一种存储介质,其特征在于,所述存储介质包括存储的程序,其中,在所述程序运行时控制所述存储介质所在设备执行如权利要求1至权利要求7中任意一项所述的车辆加速状态的平滑过渡控制方法。
10.一种处理器,其特征在于,所述处理器用于运行程序,其中,所述程序运行时执行如权利要求1至权利要求7中任意一项所述的车辆加速状态的平滑过渡控制方法。
技术总结
本发明公开了一种车辆加速状态的平滑过渡控制方法及装置,涉及汽车技术领域,主要目的在于解决现有技术中当驾驶员主动加速状态结束后,车辆回到自适应巡航控制模式时缺乏过渡状态导致的车辆可能会出现推背感、减速分段感等舒适性较差问题。本发明主要的技术方案为:监测驾驶员主动加速状态是否结束;若结束,则基于自适应巡航控制模式计算的目标需求加速度确定车辆的平滑过渡策略;基于所述平滑过渡策略控制车辆在所述驾驶员主动加速状态与所述自适应巡航控制模式之间平滑过渡。本发明用于控制车辆在所述驾驶员主动加速状态与所述自适应巡航控制模式之间平滑过渡。
技术研发人员:韩翠杰
受保护的技术使用者:合众新能源汽车股份有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!