车辆控制装置和方法与流程
本发明涉及一种车辆控制装置和方法。
背景技术:
1、在车道变更(变道)情况下,自动驾驶车辆可在行车道的中心设置变道起始目标点。自动驾驶车辆可在变道目标车道的中心设置变道结束目标点。自动驾驶车辆可被控制成自动驾驶以在变道起始目标点开始变道,并跟随变道结束目标点。
2、一般来说,当附近物体靠近或者乘客想要上车或下车时,可能会出现行驶车辆偏向远离行车道中心的方向,即车辆偏转到、车辆驶向或者车辆远离行车道中心的方向等情况。在这种情况下,当需要变道时,将对车辆施加额外的转向力,以便在行车道的中心设置的变道起始目标点开始变道。
3、然而,当从行驶车道的中心偏向一侧的程度(即偏离程度)较大时,额外转向所需的转向角也增大。因此,当以突然增大的转向角执行车辆的转向时,乘员可能会因运动变化而感到不舒服或焦虑。
技术实现思路
1、本发明旨在解决现有技术中出现的上述问题,同时保持现有技术所取得的优点。
2、本发明的各方面提供一种车辆控制装置和方法,该装置和方法用于在自动驾驶车辆发生变道的情况下,当车辆从其所在车道的中心偏向一个方向时控制变道,同时不使乘员感觉到运动变化。
3、本发明的各个方面提供一种车辆控制装置和方法,该装置和方法用于基于与车辆所在车道的中心在一个方向上的偏离度大于或等于参考值来重设变道起始目标点。
4、本发明的各个方面提供一种车辆控制装置和方法,该装置和方法用于在自动驾驶车辆进入变道起始目标点(该变道起始目标点是在自动驾驶车辆位于车道的中心时设置的)的进入角度大于预存储角度的情况下重设变道起始目标点,使得进入角度小于预存储角度。
5、本发明的各个方面提供一种车辆控制装置和方法,该装置和方法用于基于连接基于自动驾驶车辆的中心生成的变道起始目标点和变道结束目标点的基准线和车道的中心相交的交点,来重设变道起始目标点。
6、本发明的各个方面提供一种车辆控制装置和方法,该装置和方法用于在移动到重设的变道起始目标点时,通过选择转向角改变最小的变道起始目标点来控制变道。
7、本发明所要解决的技术问题并不局限于上述问题。本发明所属领域的普通技术人员通过说明书应更清楚理解任何其他未在本文提及的技术问题。
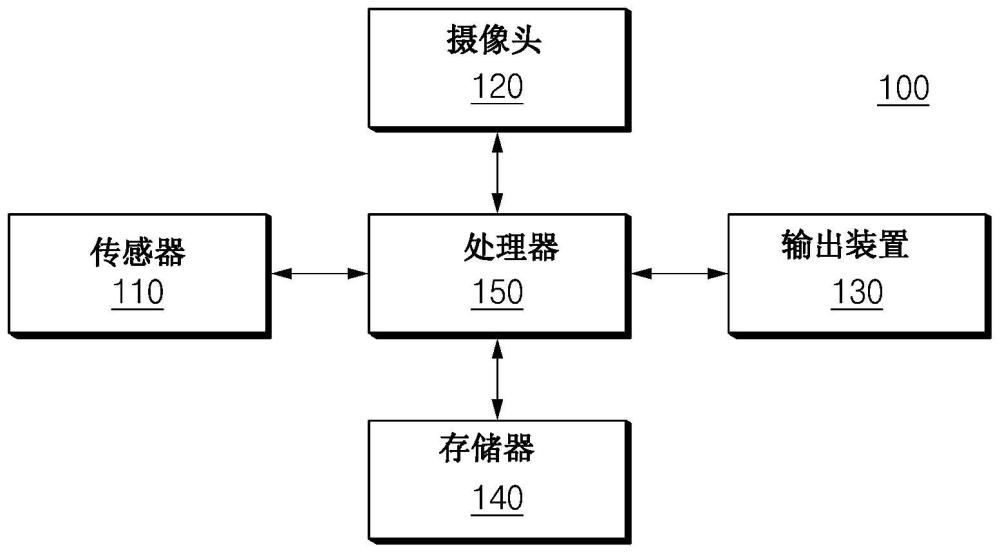
8、根据本发明的一个方面,一种车辆控制装置,包括:一个或多个传感器,配置为获得与在行车道内行驶的车辆相关的信息。该装置还包括处理器,被配置为:以行车道的中心为基准设置变道起始目标点,并且如果确定出车辆的中心相对于行车道的中心偏向一个方向,则基于车辆的位置设置至少一个新变道起始目标点。
9、在一个实施例中,处理器可确定从行车道的中心到行车道的一端的第一距离,以及从行车道的中心到车辆的中心的第二距离。处理器可将第二距离与第一距离的比率确定为偏离度。处理器可根据第二距离和偏离度,将偏离行车道的中心的点设置为至少一个新变道起始目标点。
10、在一个实施例中,处理器可以将连接车辆的中心和变道起始目标点的线与设置在行车道的中心的假想线之间的角度确定为进入角度。如果进入角度大于或等于预先存储的角度,则通过沿假想线移动变道起始目标点使得进入角度小于预先存储的角度,来设置至少一个新变道起始目标点。
11、在一个实施例中,处理器可将连接基于车辆的中心设置的变道起始目标点和变道结束目标点的基准线与行车道的中心相交的交点设置为至少一个新变道起始目标点。
12、在一个实施例中,处理器可在车辆移动到至少一个新变道起始目标点的情况下,选择转向角改变最小的另一新变道起始目标点。
13、在一个实施例中,处理器可基于所选择的另一新变道起始目标点来控制变道。
14、在一个实施例中,处理器可在变道目标车道的中心设置变道结束目标点;生成从至少一个新变道起始目标点追随变道结束目标点的变道路径;并且基于变道路径来控制变道。
15、在一个实施例中,处理器可在设置了至少一个新变道起始目标点的情况下执行控制,以通过输出装置输出至少一个新变道起始目标点和变道路径。
16、在一个实施例中,处理器使用户能够从多个输出变道路径中选择变道路径;并且基于由用户选择的变道路径来控制变道。
17、根据本发明的另一方面,一种车辆控制方法,包括以行车道的中心为基准设置变道起始目标点。该方法还包括如果确定出车辆的中心相对于行车道的中心偏向一个方向,则基于车辆的位置设置至少一个新变道起始目标点。
18、在一个实施例中,车辆控制方法还包括确定从行车道的中心到行车道的一端的第一距离,以及从行车道的中心到车辆的中心的第二距离。该方法还包括将第二距离与第一距离的比率确定为偏离度。该方法还包括基于第二距离和偏离度,将偏离行车道的中心的点设置为至少一个新变道起始目标点。
19、在一个实施例中,车辆控制方法还包括将连接车辆的中心和变道起始目标点的线与设置在行车道的中心的假想线之间的角度确定为进入角度。该方法还包括在进入角度大于或等于预先存储的角度的情况下,通过沿假想线移动变道起始目标点使得进入角度小于预先存储的角度,来设置至少一个新变道起始目标点。
20、在一个实施例中,车辆控制方法还包括将连接基于车辆的中心设置的变道起始目标点和变道结束目标点的基准线与行车道的中心相交的交点设置为至少一个新变道起始目标点。
21、在一个实施例中,车辆控制方法还包括在车辆移动到至少一个新变道起始目标点的情况下,选择转向角改变最小的另一新变道起始目标点。
22、在一个实施例中,车辆控制方法还包括基于所选择的另一新变道起始目标点来控制变道。
23、在一个实施例中,车辆控制方法还包括在变道目标车道的中心设置变道结束目标点;生成从至少一个新变道起始目标点追随变道结束目标点的变道路径;以及基于变道路径来控制变道。
24、在一个实施例中,车辆控制方法还包括在设置了至少一个新变道起始目标点的情况下执行控制,以通过输出装置输出至少一个新变道起始目标点和变道路径。
25、在一个实施例中,车辆控制方法还包括以下步骤:使用户能够从多个输出变道路径中选择变道路径。该方法还包括基于由用户选择的变道路径来控制变道。
技术特征:
1.一种车辆控制装置,包括:
2.根据权利要求1所述的车辆控制装置,其中,所述处理器被配置为:
3.根据权利要求1所述的车辆控制装置,其中,所述处理器被配置为:
4.根据权利要求1所述的车辆控制装置,其中,所述处理器被配置为将连接基于所述车辆的中心设置的所述变道起始目标点和变道结束目标点的基准线与所述行车道的中心相交的交点设置为所述至少一个新变道起始目标点。
5.根据权利要求1所述的车辆控制装置,其中,所述处理器被配置为在所述车辆移动到所述至少一个新变道起始目标点的情况下,选择转向角改变最小的另一新变道起始目标点。
6.根据权利要求5所述的车辆控制装置,其中,所述处理器被配置为基于所选择的另一新变道起始目标点来控制变道。
7.根据权利要求1所述的车辆控制装置,其中,所述处理器被配置为:
8.根据权利要求7所述的车辆控制装置,其中,所述处理器被配置为在设置了所述至少一个新变道起始目标点的情况下执行控制,以通过输出装置输出所述至少一个新变道起始目标点和所述变道路径。
9.根据权利要求8所述的车辆控制装置,其中,所述处理器被配置为:
10.一种车辆控制方法,包括以下步骤:
11.根据权利要求10所述的车辆控制方法,还包括以下步骤:
12.根据权利要求10所述的车辆控制方法,还包括以下步骤:
13.根据权利要求10所述的车辆控制方法,还包括以下步骤:
14.根据权利要求10所述的车辆控制方法,还包括以下步骤:
15.根据权利要求14所述的车辆控制方法,还包括以下步骤:
16.根据权利要求10所述的车辆控制方法,还包括以下步骤:
17.根据权利要求16所述的车辆控制方法,还包括以下步骤:
18.根据权利要求17所述的车辆控制方法,还包括以下步骤:使用户能够从多个输出变道路径中选择所述变道路径;以及
技术总结
本发明涉及一种车辆控制装置和方法,该车辆控制装置包括:一个或多个传感器,配置为获得与在行车道内行驶的车辆相关的信息;以及处理器,被配置为:以行车道的中心为基准设置变道起始目标点,并且如果确定出车辆的中心相对于行车道的中心偏向一个方向,则基于车辆的位置设置至少一个新变道起始目标点。
技术研发人员:金成官,韩修镇
受保护的技术使用者:现代自动车株式会社
技术研发日:
技术公布日:2024/11/26
- 还没有人留言评论。精彩留言会获得点赞!