一种主动减振器压力损失补偿算法的制作方法
本发明属于汽车主动减振器,具体涉及一种主动减振器压力损失补偿算法。
背景技术:
1、现有的一部分主动减振器的电动液压泵一侧直接与主动减振器下腔室连接,另外一侧首先经过节流阀,然后再到作动器的上腔室,由于节流阀的存在,会有一定的压降,导致电动液压泵的压差与活塞两侧的压差不相等,最终会导致输出的作动力不准确。
2、因此,亟需一种主动减振器压力损失补偿算法可以准确的计算出主动减振器输出的力值。
技术实现思路
1、针对现有技术中存在的主动悬架在运动过程中,油液流经减振器内部的节流阀产生压力降从而导致主动减振器输出的主动力值衰减等问题,本发明提供了一种主动减振器压力损失补偿算法,通过适当的增大或者适当的减小电机的扭矩,弥补压力损失导致的主动力衰减,使最终的输出的主动力满足需求,保证了主动减振器输出主动力值的精准性。
2、本发明通过如下技术方案实现:
3、一种主动减振器压力损失补偿算法,具体包括如下步骤:
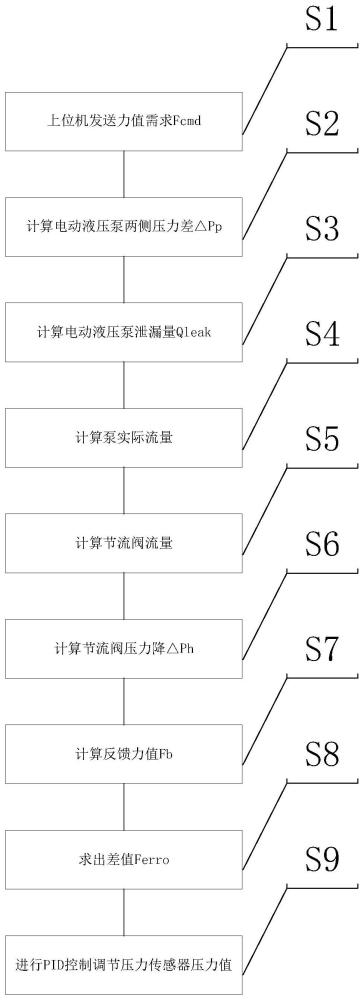
4、s1、上位机发送需求力值fcmd给电动液压泵,电动液压泵驱动作动器,使其力值满足需求力值fcmd;
5、s2、计算电动液压泵两侧压力差△pp;
6、s3、根据步骤s2得到的压力差△pp计算电动液压泵泄漏量qleak;
7、s4、根据步骤s3计算得到的电动液压泵泄漏量qleak计算泵实际流量q实际=q理论-qleak=n*d/60–qleak,其中,d为摆线泵的转排量,n为电机的转速;
8、s5、根据步骤s4得到的泵实际流量q计算节流阀流量;
9、s6、根据步骤s5得到的节流阀流量计算节流阀压力降△ph;
10、s7、根据步骤s6得到的压力降计算反馈力值fb;
11、s8、根据步骤s7的反馈力值fb与步骤s1中上位机发送的需求力值fcmd求出差值ferro,然后对差值ferro进行pid控制调节压力传感器的压力值;
12、s9、输出准确的作动力值。
13、进一步地,步骤s2中,所述电动液压泵两侧压力差△pp通过已知的蓄能器压力值和压力传感器读数值作差求得。
14、进一步地,步骤s3中,具体包括如下内容:
15、将电动液压泵置于到阀p-q特性的试验台架上,对电动液压泵施加不同的流量,测试其相对应的压力降,然后拟合压力降与流量的函数。
16、进一步地,步骤s4中,电机的转速通过电机的转速传感器求得。
17、进一步地,步骤s5中,泵实际流量q与节流阀流量相等。
18、进一步地,步骤s6中,具体包括如下内容:
19、将节流阀置于到阀p-q特性的试验台架上,对节流阀施加不同的流量,测试其相对应的压力降,然后拟合压力降与流量的函数。
20、进一步地,步骤s7中,所述反馈力值fb=-△pp*ap+△ph*(ap-ar),其中,△pp为电动液压泵的压力降,ap为活塞面积,△pp为节流阀的压力降,ar为活塞杆的面积。
21、进一步地,步骤s8中,所述对差值ferro进行pid控制调节压力传感器的压力值,具体第,所述反馈力值fb=kp*(fcmd-△pp*ap)+ki*(fcmd-△pp*ap)*1/s+kd*(fcmd-△pp*ap)*s,式中,kp为比例环节系数,ki为积分环节系数,kd为微分环节系数。
22、与现有技术相比,本发明的优点如下:
23、本发明的一种主动减振器压力损失补偿算法,通过适当的增大或者适当的减小电机的扭矩,弥补压力损失导致的主动力衰减,使最终的输出的主动力满足需求,保证了主动减振器输出主动力值的精准性。
技术特征:
1.一种主动减振器压力损失补偿算法,其特征在于,具体包括如下步骤:
2.如权利要求1所述的一种主动减振器压力损失补偿算法,其特征在于,步骤s2中,所述电动液压泵两侧压力差△pp通过已知的蓄能器压力值和压力传感器读数值作差求得。
3.如权利要求1所述的一种主动减振器压力损失补偿算法,其特征在于,步骤s3中,具体包括如下内容:
4.如权利要求1所述的一种主动减振器压力损失补偿算法,其特征在于,步骤s4中,电机的转速通过电机的转速传感器求得。
5.如权利要求1所述的一种主动减振器压力损失补偿算法,其特征在于,步骤s5中,泵实际流量q与节流阀流量相等。
6.如权利要求1所述的一种主动减振器压力损失补偿算法,其特征在于,步骤s6中,具体包括如下内容:
7.如权利要求1所述的一种主动减振器压力损失补偿算法,其特征在于,步骤s7中,所述反馈力值fb=-△pp*ap+△ph*(ap-ar),其中,△pp为电动液压泵的压力降,ap为活塞面积,△pp为节流阀的压力降,ar为活塞杆的面积。
8.如权利要求1所述的一种主动减振器压力损失补偿算法,其特征在于,步骤s8中,所述对差值ferro进行pid控制调节压力传感器的压力值,具体第,所述反馈力值fb=kp*(fcmd-△pp*ap)+ki*(fcmd-△pp*ap)*1/s+kd*(fcmd-△pp*ap)*s,式中,kp为比例环节系数,ki为积分环节系数,kd为微分环节系数。
技术总结
本发明公开了一种主动减振器压力损失补偿算法,属于汽车主动减振器技术领域,具体包括如下步骤:S1、上位机发送需求力值Fcmd给电动液压泵,电动液压泵驱动作动器,使其力值满足需求力值Fcmd;S2、计算电动液压泵两侧压力差△Pp;S3、计算电动液压泵泄漏量Qleak;S4、计算泵实际流量;S5、计算节流阀流量;S6、计算节流阀压力降△Ph;S7、计算反馈力值Fb;S8、求出差值Ferro,然后对差值Ferro进行PID控制调节压力传感器的压力值;S9、输出准确的作动力值。本发明通过适当的增大或者适当的减小电机的扭矩,弥补压力损失导致的主动力衰减,使最终的输出的主动力满足需求,保证了主动减振器输出主动力值的精准性。
技术研发人员:豆开放,王大壮,贾跃,丁树伟,李俊伟,郑文博,禹真,陈志刚,侯杰,王仕伟
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!