自动驾驶车辆的速度规划方法、装置、设备及车辆与流程
本申请涉及计算机,具体涉及智能交通和自动驾驶等,特别涉及一种自动驾驶车辆的速度规划方法、装置、设备及存储介质。
背景技术:
1、在自动驾驶领域,确定了自车的路径后,通常的速度规划方案需要考虑到所有潜在碰撞风险的障碍物,并且根据动静态障碍物在自车路径上占据的位置以及出现的时间,通过对每个时间点自车在路径的安全位置进行采样,并根据采样点生成一条可行驶的安全速度轨迹。
2、但是,实际驾驶场景中的道路环境情况较为复杂,需要提高自动驾驶车辆的速度轨迹规划的可靠性和安全性。
技术实现思路
1、本申请提供了一种自动驾驶车辆的速度规划方法、装置、设备及车辆,保证了自动驾驶车辆的速度规划的可靠性,所述技术方案如下:
2、第一方面,提供了一种自动驾驶车辆的速度规划方法,所述方法包括:
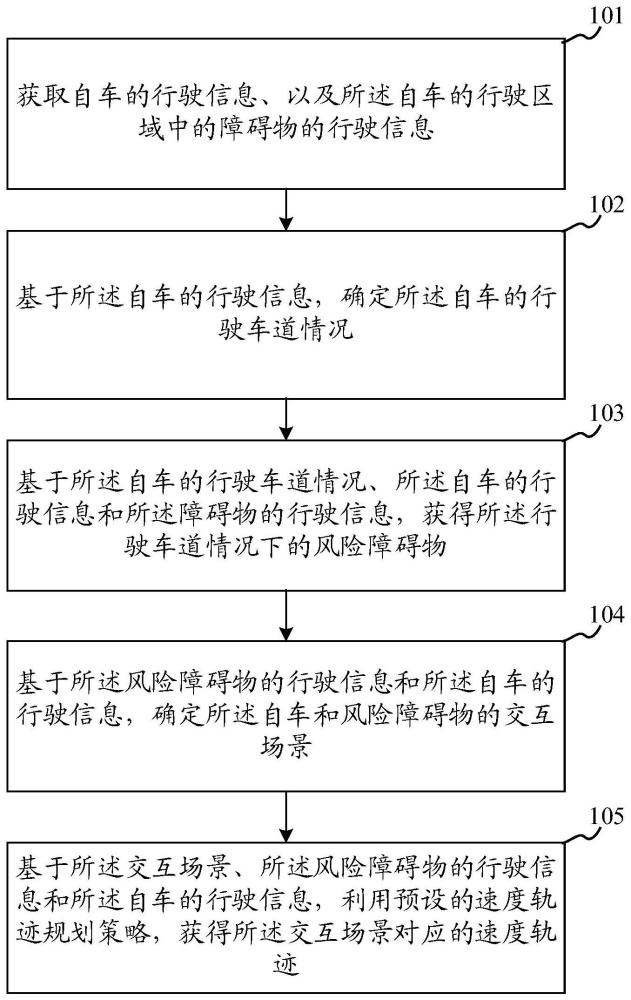
3、获取自车的行驶信息、以及所述自车的行驶区域中的障碍物的行驶信息;
4、基于所述自车的行驶信息,确定所述自车的行驶车道情况;
5、基于所述自车的行驶车道情况、所述自车的行驶信息和所述障碍物的行驶信息,获得所述行驶车道情况下的风险障碍物;
6、基于所述风险障碍物的行驶信息和所述自车的行驶信息,确定所述自车和风险障碍物的交互场景;
7、基于所述交互场景、所述风险障碍物的行驶信息和所述自车的行驶信息,利用预设的速度轨迹规划策略,获得所述交互场景对应的速度轨迹。
8、第二方面,提供了一种自动驾驶车辆的速度规划装置,所述装置包括:
9、第一获取单元,用于获取自车的行驶信息、以及所述自车的行驶区域中的障碍物的行驶信息;
10、第一确定单元,用于基于所述自车的行驶信息,确定所述自车的行驶车道情况;
11、第一获得单元,用于基于所述自车的行驶车道情况、所述自车的行驶信息和所述障碍物的行驶信息,获得所述行驶车道情况下的风险障碍物;
12、第二确定单元,用于基于所述风险障碍物的行驶信息和所述自车的行驶信息,确定所述自车和风险障碍物的交互场景;
13、第二获得单元,用于基于所述交互场景、所述风险障碍物的行驶信息和所述自车的行驶信息,利用预设的速度轨迹规划策略,获得所述交互场景对应的速度轨迹。
14、第三方面,提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现如上如上所述的方面和任一可能的实现方式的方法。
15、第四方面,提供了一种电子设备,包括:
16、至少一个处理器;以及
17、与所述至少一个处理器通信连接的存储器;其中,
18、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如上所述的方面和任一可能的实现方式的方法。
19、第五方面,提供了一种自动驾驶车辆,包括如上所述的电子设备。
20、本申请提供的技术方案的有益效果至少包括:
21、由上述技术方案可知,本申请实施例可以通过获取自车的行驶信息、以及所述自车的行驶区域中的障碍物的行驶信息,进而可以基于所述自车的行驶信息,确定所述自车的行驶车道情况,基于所述自车的行驶车道情况、所述自车的行驶信息和所述障碍物的行驶信息,获得所述行驶车道情况下的风险障碍物,基于所述风险障碍物的行驶信息和所述自车的行驶信息,确定所述自车和风险障碍物的交互场景,使得能够基于所述交互场景、所述风险障碍物的行驶信息和所述自车的行驶信息,利用预设的速度轨迹规划策略,获得所述交互场景对应的速度轨迹,由于可以通过根据自车的行驶信息和障碍物的行驶信息,获得不同行驶车道情况下的风险障碍物,再根据自车与风险障碍物的行驶信息获得速度规划的交互场景,以根据自车与风险障碍物的交互场景进行对应的速度轨迹规划,可以在道路环境较为复杂情况下,规划出更加合理有效地速度轨迹,从而提高自动驾驶车辆的速度轨迹规划的可靠性和安全性。
22、应当理解,本部分所描述的内容并非旨在标识本申请的实施例的关键或重要特征,也不用于限制本申请的范围。本申请的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种自动驾驶车辆的速度规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述自车的行驶信息包括地图信息,所述行驶车道情况包括存在合并车道区域和不存在合并车道区域,所述基于所述自车的行驶信息,确定所述自车的行驶车道情况,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述自车的行驶车道情况、所述自车的行驶信息和所述障碍物的行驶信息,获得所述行驶车道情况下的风险障碍物,包括:
4.根据权利要求2所述的方法,其特征在于,所述自车的行驶信息包括规划路径信息,所述基于所述自车的行驶车道情况、所述自车的行驶信息和所述障碍物的行驶信息,获得所述行驶车道情况下的风险障碍物,包括:
5.根据权利要求4所述的方法,其特征在于,所述基于预设的风险条件、所述自车的规划路径信息和所述候选障碍物的行驶信息,对所述候选障碍物进行筛选处理,包括:
6.根据权利要求5所述的方法,其特征在于,所述碰撞风险信息包括风险时间、风险距离和风险评价值,所述基于预设的风险条件和所述候选障碍物与所自车的碰撞风险信息,对所述候选障碍物进行筛选处理,包括:
7.根据权利要求6所述的方法,其特征在于,所述方法,还包括:
8.根据权利要求1所述的方法,其特征在于,所述风险障碍物的行驶信息包括风险障碍物的位置和风险障碍物的速度,所述自车的行驶信息包括自车的位置和自车的速度,所述基于所述风险障碍物的行驶信息和所述自车的行驶信息,确定所述自车和风险障碍物的交互场景,包括:
9.根据权利要求1所述的方法,其特征在于,所述交互场景包括自车跟随障碍物行驶场景、障碍物逆行行驶场景、障碍物并道行驶场景、静态障碍物场景、以及自车并道行驶场景中的至少一项。
10.根据权利要求1至9中任一项所述的方法,其特征在于,所述基于所述交互场景、所述风险障碍物的行驶信息和所述自车的行驶信息,利用预设的速度轨迹规划策略,获得所述交互场景对应的速度轨迹,包括:
11.一种自动驾驶车辆的速度规划装置,其特征在于,所述装置包括:
12.一种电子设备,包括:
技术总结
本申请公开了一种自动驾驶车辆的速度规划方法、装置、设备及车辆,属于涉及计算机技术领域。所述方法包括:获取自车的行驶信息、以及所述自车的行驶区域中的障碍物的行驶信息;基于所述自车的行驶信息,确定所述自车的行驶车道情况;基于所述自车的行驶车道情况、所述自车的行驶信息和所述障碍物的行驶信息,获得所述行驶车道情况下的风险障碍物;基于所述风险障碍物的行驶信息和所述自车的行驶信息,确定所述自车和风险障碍物的交互场景;基于所述交互场景、所述风险障碍物的行驶信息和所述自车的行驶信息,利用预设的速度轨迹规划策略,获得所述交互场景对应的速度轨迹。本申请优化了车辆速度规划的可靠性和效率。
技术研发人员:贾昌昊,黄云华,张瑶港
受保护的技术使用者:新石器(盐城)智能制造有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!