基于数字孪生的防止拖拉机侧翻的方法
本发明涉及车辆防侧翻,特别是基于数字孪生的防止拖拉机侧翻的方法。
背景技术:
1、丘陵山地地区地势崎岖,限制了中大型拖拉机的使用,而小型轮式拖拉机相对效率偏低且作业过程中由于重心变化易发生侧翻,从而造成大量人员及财产损失降低农业生产效率。目前国内外也提出了多种解决思路,包括驾驶模拟器,动态仿真,动力学仿真,液压互联悬架系统,以及深度神经网络等都在防止侧翻事故发生中取得较好效果。
2、但是由于侧翻事故发生的不确定性无法直观从物理实体观测侧翻发生的具体情况,也就无法做到提前预警。
3、为了在侧翻事故发生之前做到提前警示并提出解决方案,本发明提出了一种基于数字孪生的防止丘陵山地作业轮式拖拉机侧翻的方法。
技术实现思路
1、本发明的目的在于提供基于数字孪生的防止拖拉机侧翻的方法,以解决小型轮式拖拉机在丘陵地区运作易发生侧翻的问题。
2、本发明的目的通过以下技术方案来实现:
3、基于数字孪生的防止拖拉机侧翻的方法,包括以下步骤:
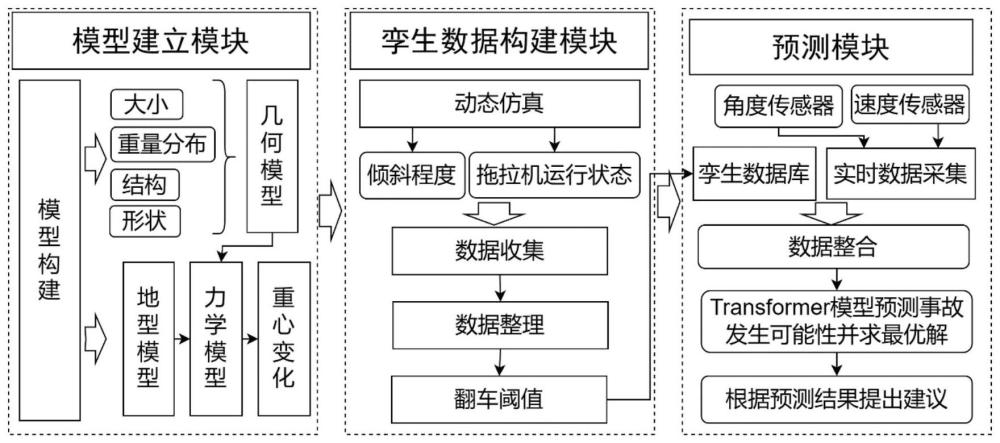
4、s1、制作丘陵山地地区模型和轮式拖拉机模型,在adams仿真软件将轮式拖拉机模型置于丘陵山地地区模型中进行受力分析得到力学模型,在adams仿真软件将轮式拖拉机模型与力学模型融合构建出与轮式拖拉机实体参数一致的反应轮式拖拉机重心变化的孪生体拖拉机;
5、s2、在adams仿真软件中将孪生体拖拉机置于不同倾斜角度的丘陵山地地区模型中,模拟轮式拖拉机模型运行情况得到翻车阈值数据;
6、s3、在pycharm中对步骤s2收集的数据进行清洗,删除冗余和缺失的数据,初步形成包括拖拉机几何参数、丘陵山地参数及仿真结果的孪生数据库,并通过cart算法将所得的数据分类储存在孪生数据库中;
7、s4、通过将实体拖拉机上角度传感器和速度传感器采集的实时数据与孪生数据库中的数据进行整合后利用transformer算法模型预测事故发生概率,并根据预测结果反馈预测信息并提出建议。
8、进一步的,所述轮式拖拉机模型为轮式拖拉机的大小、重量分布、结构、形状构建的几何模型,所述丘陵山地地区模型为丘陵山地的坡度及粗糙程度构建的地型模型。
9、进一步的,所述步骤s3中,cart算法分类存储的具体步骤为先输入pycharm处理后的数据以及翻车阈值数据和切分的样本个数,利用基尼系数对数据进行标记:
10、
11、
12、式中,n是样本分类个数,m是样本切割的个数,算法采取基尼系数最小的方法进行分类,进而一步步对数据切割,经算法分类后可得到分类二叉树,该结果为transformer算法模型提供训练依据。
13、进一步的,所述步骤s4中,transformer算法模型预测事故发生概率时,将拖拉机侧翻问题转化为一个序列到序列任务:编码器的输入是拖拉机行驶过程中的一系列特征数据,解码器的输入是侧翻事件发生前的拖拉机特征序列,解码器的输出通过一个线性变换和softmax函数得到预测的概率分布,表示拖拉机在该时刻会发生侧翻的预测概率。
14、进一步的,所述transformer算法模型中,利用编码器和解码器中的自注意力机制用于建模序列中的依赖关系,使得模型能够根据输入的任意位置对整个序列进行建模,在所述transformer算法模型中使用多层多层线性层将x映射到高维度空间,包括:
15、q=wq×x
16、k=wk×x
17、v=wv×x
18、
19、wq,wk,wv分别是模型内部自设定参数,通过后续模型训练,利用反传播算法进行优化调整参数,x为经过添加位置编码的拖拉机特征序列,其中位置编码公式如下:
20、
21、
22、pos为位置信息,i为维度信息,通过此公式将输入拖拉机特征序列中每个位置添加位置即得到x,是对运算出的qkt进行缩放,softmax函数是一个归一化算法;
23、在多头注意力机制中有h个自注意机制,通过上述公式计算可以得到单个自注意机制的输出z,而多头注意机制有h个自注意机制就意味着可以得到h个输出矩阵z,经过多头注意力机制拼接处理可以得到一个最终输出z,同时这个最终输出矩阵z的维度与输入的添加位置编码的拖拉机特征序列x的维度是一致的,多头注意力机制公式如下:
24、multihead(q,k,v)=concat(head1,...,headh)·w。
25、where headi=attention(qi,ki,vi)。
26、进一步的,所述编码器由多头注意力机制,残差和标准化模块,前馈机制,残差和标准化模块组成,残差和标准化模块计算公式如下:
27、layernrom(x+mulheadsttention(x))
28、layernrom(x+mulheadsttention(x))
29、muitiheadattention(x)即为多头注意力机制输出矩阵z,feed forward(x)为前馈机制输出,两者输出矩阵维度皆与x一致;
30、编码器在接收输入矩阵x后输出编码矩阵c,随后c作为输入矩阵进入解码器结构中,解码器与编码器相似但其包含连个多头注意机制,而c正是其第二个多头注意机制输入。
31、进一步的,在训练transformer算法模型时,使用交叉熵损失函数来计算预测值与实际标签之间的差距,并通过反向传播算法更新模型参数,优化模型得到最优解。
32、本发明具有以下优点:通过构建拖拉机及丘陵山地的仿真模型,实现虚拟和现实情况的高度拟合,并通过动态仿真,模拟运行状况获得不同倾角侧翻阈值的仿真数据,建立孪生数据库,再与拖拉机上安装的角度传感器和速度传感器测量的实时数据进行数据融合,并用transformer算法预测侧翻可能性,根据预测结果提出建议,从而减少拖拉机侧翻的事故发生,提高操作拖拉机时的安全性,一定程度上保护使用者的人身安全。
技术特征:
1.基于数字孪生的防止拖拉机侧翻的方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的基于数字孪生的防止拖拉机侧翻的方法,其特征在于:所述轮式拖拉机模型为轮式拖拉机的大小、重量分布、结构、形状构建的几何模型,所述丘陵山地地区模型为丘陵山地的坡度及粗糙程度构建的地型模型。
3.根据权利要求1所述的基于数字孪生的防止拖拉机侧翻的方法,其特征在于:所述步骤s3中,cart算法分类存储的具体步骤为先输入pycharm处理后的数据以及翻车阈值数据和切分的样本个数,利用基尼系数对数据进行标记:
4.根据权利要求1所述的基于数字孪生的防止拖拉机侧翻的方法,其特征在于:所述步骤s4中,transformer算法模型预测事故发生概率时,将拖拉机侧翻问题转化为一个序列到序列任务:编码器的输入是拖拉机行驶过程中的一系列特征数据,解码器的输入是侧翻事件发生前的拖拉机特征序列,解码器的输出通过一个线性变换和softmax函数得到预测的概率分布,表示拖拉机在该时刻会发生侧翻的预测概率。
5.根据权利要求4所述的基于数字孪生的防止拖拉机侧翻的方法,其特征在于:所述transformer算法模型中,利用编码器和解码器中的自注意力机制用于建模序列中的依赖关系,使得模型能够根据输入的任意位置对整个序列进行建模,在所述transformer算法模型中使用多层多层线性层将x映射到高维度空间,包括:
6.根据权利要求5所述的基于数字孪生的防止拖拉机侧翻的方法,其特征在于:所述编码器由多头注意力机制,残差和标准化模块,前馈机制,残差和标准化模块组成,残差和标准化模块计算公式如下:
7.根据权利要求3所述的基于数字孪生的防止拖拉机侧翻的方法,其特征在于:
技术总结
本发明公开了基于数字孪生的防止拖拉机侧翻的方法,包括以下步骤:S1、制作丘陵山地地区模型和轮式拖拉机模型,在仿真软件构建孪生体拖拉机;S2、在仿真软件中模拟轮式拖拉机模型运行情况得到翻车阈值数据;S3、在pycharm中形成孪生数据库并分类储存;S4、通过将实体拖拉机上的实时数据与孪生数据库中的数据进行整合后利用Transformer算法模型预测事故发生概率。通过构建拖拉机及丘陵山地的仿真模型,实现虚拟和现实情况的高度拟合,模拟运行状况获得不同倾角侧翻阈值的仿真数据,建立孪生数据库,再与拖拉机上测量的实时数据进行数据融合,并用Transformer算法预测侧翻可能性,根据预测结果提出建议,从而减少拖拉机侧翻的事故发生,提高操作拖拉机时的安全性。
技术研发人员:黄刚劲,李慧玲,许丽佳,赵永鹏,王玉超,刘姿余,李忠彦
受保护的技术使用者:四川农业大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!