本申请属于智能驾驶,涉及一种车辆巡航控制方法、系统、介质、电子设备及车机。
背景技术:
1、车辆自适应巡航控制在车辆辅助驾驶领域得到了越来越多的关注,车辆自适应巡航控制系统可以根据路况实时控制车辆的行驶状态,减轻驾驶者的负担。定速巡航是车辆自适应巡航的一个子功能,用于稳定车速,无需驾驶员频繁踩踏油门来保持车速的操作。传统定速巡航方法的定速巡航速度偏差较大,容易在上下坡时车速来回震荡。
技术实现思路
1、本申请提供一种车辆巡航控制方法、系统、介质、电子设备及车机,用于提高定速巡航的控制精度,减少控制过程中产生的速度波动。
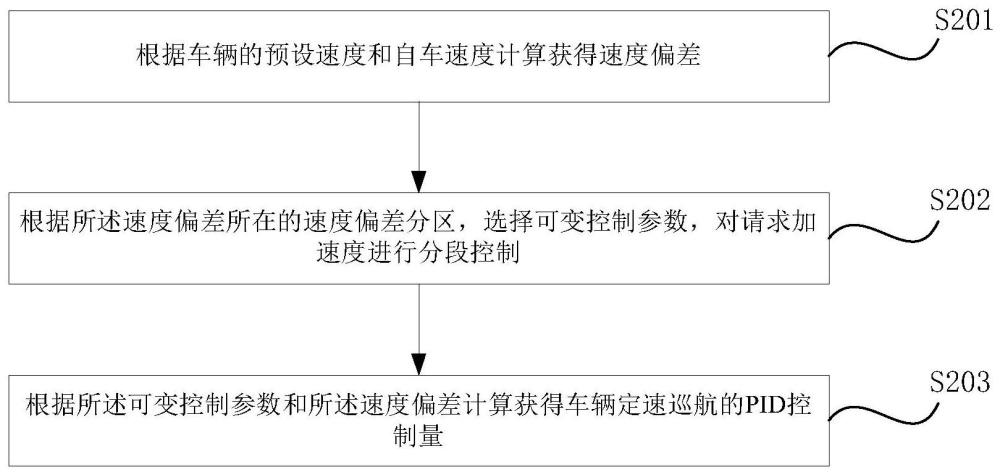
2、第一方面,本申请提供一种车辆巡航控制方法。所述车辆巡航控制方法包括:根据车辆的预设速度和自车速度计算获得速度偏差;根据所述速度偏差所在的速度偏差分区,选择可变控制参数,对请求加速度进行分段控制;其中,所述速度偏差分区是根据速度偏差大小划分的分区,包括负向偏大区、负向偏小区、正向偏小区和正向偏大区;根据所述可变控制参数和所述速度偏差计算获得车辆定速巡航的pid控制量。
3、在第一方面的一种实现方式中,所述速度偏差分区的划分方式包括:设定比例控制速度偏差分区;根据各比例控制速度偏差分区选择对应的比例控制可变参数。
4、在第一方面的一种实现方式中,所述速度偏差分区的划分方式包括:设定积分控制速度偏差分区;根据各积分控制速度偏差分区选择对应的积分控制可变参数。
5、在第一方面的一种实现方式中,根据所述可变控制参数和所述速度偏差计算获得车辆定速巡航的pid控制量包括:所述可变控制参数包括比例控制可变参数和积分控制可变参数;根据所述比例控制可变参数计算获得比例控制量;根据所述积分控制可变参数计算获得积分控制量;根据所述比例控制量和积分控制量计算获得车辆定速巡航的pid控制量。
6、在第一方面的一种实现方式中,还包括:对所述积分控制量进行限幅处理;根据限幅后的积分控制量与所述比例控制量计算获得所述车辆定速巡航的pid控制量。
7、在第一方面的一种实现方式中,还包括:若所述速度偏差在积分死区,则所述积分控制量清零。
8、在第一方面的一种实现方式中,还包括:车辆进入舒缓制动激活状态时,计算获得车辆的舒缓制动减速度;所述车辆在舒缓制动激活状态下的pid控制量执行为所述舒缓制动减速度;车辆进入舒缓制动退出过渡阶段时,根据所述车辆的舒缓制动减速度和所述车辆定速巡航的pid控制量计算获得车辆在舒缓制动退出过渡阶段的pid控制量;车辆退出舒缓制动退出过渡阶段进入定速巡航激活状态时,执行所述车辆定速巡航的pid控制量。
9、第二方面,本申请提供一种车辆巡航控制系统。所述车辆巡航控制系统包括:速度偏差计算模块,根据车辆的预设速度和自车速度计算获得速度偏差;可变控制参数选择模块,与所述速度偏差计算模块通信相连,根据所述速度偏差所在的速度偏差分区,选择可变控制参数,对请求加速度进行分段控制;其中,所述速度偏差分区是根据速度偏差大小划分的分区,包括负向偏大区、负向偏小区、正向偏小区和正向偏大区;pid控制模块,与所述速度偏差计算模块和所述可变控制参数选择模块分别通信相连,根据所述可变控制参数和所述速度偏差计算获得车辆定速巡航的pid控制量。
10、在第二方面的一种实现方式中,还包括:舒缓制动融合控制模块,与所述pid控制模块通信相连,于车辆进入舒缓制动激活状态时,计算获得车辆的舒缓制动减速度;所述车辆在舒缓制动激活状态下的pid控制量执行为所述舒缓制动减速度;所述舒缓制动融合控制模块于车辆进入舒缓制动退出过渡阶段时,根据所述车辆的舒缓制动减速度和所述车辆定速巡航的pid控制量计算获得车辆在舒缓制动退出过渡阶段的pid控制量;所述舒缓制动融合控制模块于车辆退出舒缓制动退出过渡阶段进入定速巡航激活状态时,执行所述车辆定速巡航的pid控制量。
11、第三方面,本申请提供一种电子设备,所述电子设备包括:存储器,存储有计算机程序;处理器,与所述存储器通信相连,调用所述计算机程序时实现本申请任一项所述的车辆巡航控制方法。
12、第四方面,本申请提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现本申请任一项所述的车辆巡航控制方法。
13、第五方面,本申请提供一种车机,包括:所述车机包括本申请任一项所述的车辆巡航控制系统。
14、如上所述,本申请所述的车辆巡航控制方法、系统、介质、电子设备及车机,具有以下
15、有益效果:
16、本申请实现了基于可变参数的pid控制策略,通过可变参数进行定速巡航控制,可以使定速巡航速度控制更精确,减少控制过程中产生的速度波动。
17、本申请实现了基于舒缓制动的融合控制策略,通过融合舒缓制动减少发动机扭矩请求,将车速降至驾驶员设定车速,可以使车辆行驶更平顺,制动效果更舒适。
技术特征:1.一种车辆巡航控制方法,其特征在于,包括:
2.根据权利要求1所述的车辆巡航控制方法,其特征在于,所述速度偏差分区的划分方式包括:
3.根据权利要求1所述的车辆巡航控制方法,其特征在于,所述速度偏差分区的划分方式包括:
4.根据权利要求1所述的车辆巡航控制方法,其特征在于,根据所述可变控制参数和所述速度偏差计算获得车辆定速巡航的pid控制量包括:
5.根据权利要求4所述的车辆巡航控制方法,其特征在于,还包括:
6.根据权利要求4所述的车辆巡航控制方法,其特征在于,还包括:
7.根据权利要求1所述的车辆巡航控制方法,其特征在于,还包括:
8.一种车辆巡航控制系统,其特征在于,包括:
9.根据权利要求8所述的车辆巡航控制系统,其特征在于,还包括:
10.一种电子设备,其特征在于,包括:
11.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1至7任一项所述的车辆巡航控制方法。
12.一种车机,其特征在于,所述车机包括权利要求8至9任一项所述的车辆巡航控制系统。
技术总结本申请提供一种车辆巡航控制方法、系统、介质、电子设备及车机。所述车辆巡航控制方法包括:根据车辆的预设速度和自车速度计算获得速度偏差;根据所述速度偏差所在的速度偏差分区,选择可变控制参数,对请求加速度进行分段控制;其中,所述速度偏差分区是根据速度偏差大小划分的分区,包括负向偏大区、负向偏小区、正向偏小区和正向偏大区;根据所述可变控制参数和所述速度偏差计算获得车辆定速巡航的PID控制量。本申请能够提高定速巡航的控制精度,减少控制过程中产生的速度波动。
技术研发人员:廖志闯,王斌,袁率,邱启伦
受保护的技术使用者:上海保隆汽车科技股份有限公司
技术研发日:技术公布日:2024/4/17