电机驱动控制装置、方法、系统和车辆行驶控制系统与流程
本发明主要涉及电力电子,尤其涉及一种电机驱动控制装置、方法、系统和车辆行驶控制系统。
背景技术:
1、随着新能源车辆的使用场景不断扩展,其基于电机驱动实现车辆行驶的方式,亦需适应多种不同的车辆行驶场景。例如,在一些雪地、泥泞地等场景中,车辆易出现打滑状态。此时,如何实现对车辆的电机驱动过程的有效控制操作,以使车辆能够较好地应对此种情形,避免车辆长时间处于打滑状态,保证车辆较佳的使用体验,是需要解决的问题。
技术实现思路
1、本发明要解决的技术问题是提供一种电机驱动控制装置、方法、系统和车辆行驶控制系统,实现防滑操作时电机目标扭矩的精准计算,从而使车辆行驶时具有较佳的防滑功能。
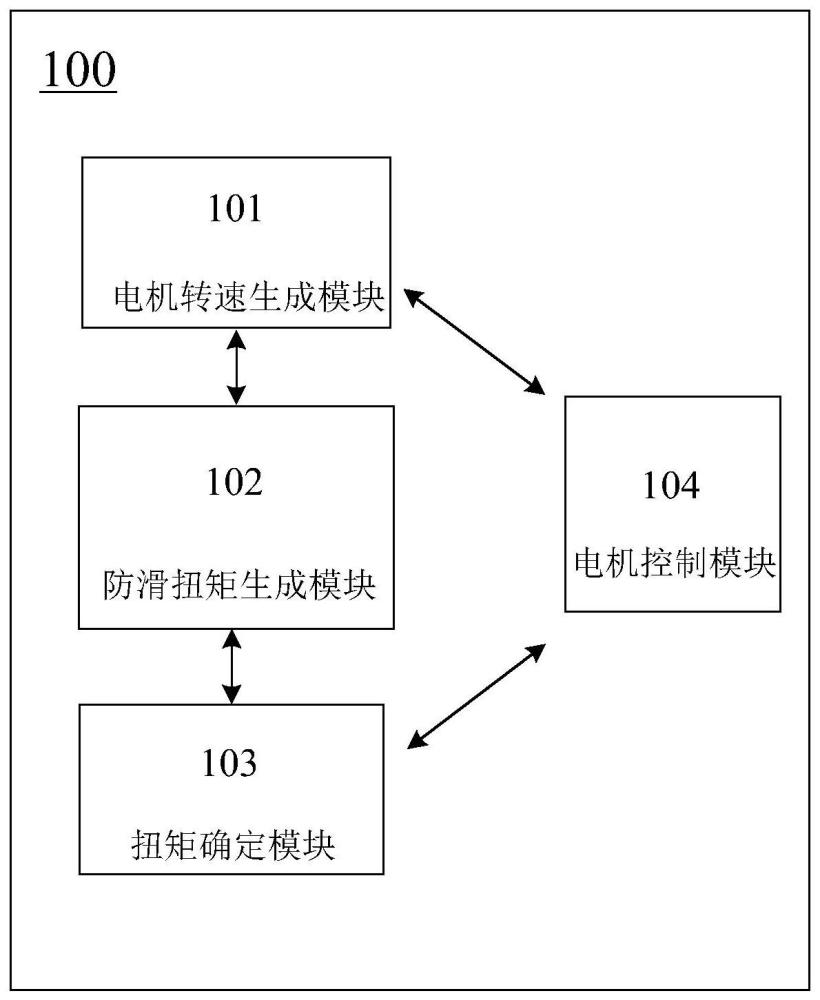
2、为解决上述技术问题,本发明提供了一种电机驱动控制装置,包括:电机转速生成模块,用于基于电机转速传感信号,计算得到电机转速;防滑扭矩生成模块,被配置为:接收电机扭矩请求值和主动防滑状态对应的电机限速值;基于所述电机转速、电机扭矩请求值和主动防滑状态对应的电机限速值计算得到当前时刻的防滑扭矩输出指令值;扭矩确定模块,被配置为:根据所述防滑扭矩输出指令值和电机扭矩请求值得到防滑扭矩执行值;电机控制模块,用于根据所述防滑扭矩执行值,生成电机驱动控制信号。
3、在本发明的一实施例中,基于所述电机转速、电机扭矩请求值和主动防滑状态对应的电机限速值计算得到防滑扭矩输出指令值包括:根据电机转速的绝对值和主动防滑状态对应的电机限速值的绝对值得到当前时刻的电机转速差值;获取前一时刻的防滑扭矩输出绝对值;根据当前时刻的电机转速差值、前一时刻的电机转速差值和前一时刻的防滑扭矩输出指令值生成当前时刻的防滑扭矩输出绝对值;获取防滑扭矩输出指令值对应的方向指示符;根据所述当前时刻的防滑扭矩输出绝对值和防滑扭矩输出指令值对应的方向指示符得到当前时刻的防滑扭矩输出指令值。
4、在本发明的一实施例中,基于当前时刻的电机转速对应的方向指示符和电机扭矩请求值对应的方向指示符得到防滑扭矩输出指令值对应的方向指示符。
5、在本发明的一实施例中,根据当前时刻的电机转速差值、前一时刻的电机转速差值和前一时刻的防滑扭矩输出指令值生成当前时刻的防滑扭矩输出绝对值包括:根据当前时刻的电机转速差值、前一时刻的电机转速差值和前一时刻的防滑扭矩输出指令值,基于比例-积分算法得到当前时刻的防滑扭矩输出绝对值。
6、在本发明的一实施例中,根据当前时刻的电机转速差值、前一时刻的电机转速差值和前一时刻的防滑扭矩输出绝对值,基于比例-积分算法得到当前时刻的防滑扭矩输出绝对值包括:
7、tor_out_curr=(diff_curr-diff_last)*kp+diff_curr*ki+tor_out_last;
8、其中,tor_out_curr为当前时刻的防滑扭矩输出绝对值,tor_out_last为前一时刻的防滑扭矩输出绝对值,diff_curr为当前时刻的电机转速差值,diff_last为前一时刻的电机转速差值;kp为比例系数,ki为积分系数。
9、在本发明的一实施例中,根据所述防滑扭矩输出指令值和电机扭矩请求值得到防滑扭矩执行值包括:通过所述电机扭矩请求值与所述防滑扭矩输出指令值的差值计算,得到防滑扭矩执行值。
10、在本发明的一实施例中,在计算所述防滑扭矩执行值之前,还基于所述电机扭矩请求值对所述防滑扭矩输出指令值进行边界值校验。
11、本发明还提供一种电机驱动控制方法,包括:基于电机转速传感信号,计算得到电机转速;接收电机扭矩请求值和主动防滑状态对应的电机限速值;基于所述电机转速、电机扭矩请求值和主动防滑状态对应的电机限速值计算得到当前时刻的防滑扭矩输出指令值;根据所述防滑扭矩输出指令值和电机扭矩请求值得到防滑扭矩执行值;根据所述防滑扭矩执行值,生成电机驱动控制信号。
12、本发明还提供一种电机驱动控制系统,包括如权利要求1-7任一项所述的电机驱动控制装置;以及晶体管功率模块;所述晶体管功率模块被配置为:基于所述电机驱动控制信号生成电机转动控制信号;所述电机转动控制信号包括三相电压信号。
13、本发明还提供一种车辆行驶控制系统,包括如权利要求1-7任一项所述的电机驱动控制装置;以及整车控制器;所述整车控制器被配置为:提供电机扭矩请求值和主动防滑状态对应的电机限速值。
14、在本发明的一实施例中,所述整车控制器被配置为:根据车辆加速踏板开度信号生成所述电机扭矩请求值。
15、在本发明的一实施例中,所述整车控制器还被配置为:根据车辆滑移率与相应阈值的关系,生成所述电机驱动控制装置的使能信号,以启动所述电机驱动控制装置。
16、与现有技术相比,本发明具有以下优点:本申请的电技术方案,通过电机实际转速和主动防滑状态对应的电机限速值的差值,和相关运算和控制操作的应用,能够实现电机目标扭矩的精准计算,从而实现车辆行驶时较佳的防滑功能。
技术特征:
1.一种电机驱动控制装置,包括:
2.根据权利要求1所述的电机驱动控制装置,其特征在于,基于所述电机转速、电机扭矩请求值和主动防滑状态对应的电机限速值计算得到防滑扭矩输出指令值包括:
3.根据权利要求2所述的电机驱动控制装置,其特征在于,基于当前时刻的电机转速对应的方向指示符和电机扭矩请求值对应的方向指示符得到防滑扭矩输出指令值对应的方向指示符。
4.根据权利要求2所述的电机驱动控制装置,其特征在于,根据当前时刻的电机转速差值、前一时刻的电机转速差值和前一时刻的防滑扭矩输出指令值生成当前时刻的防滑扭矩输出绝对值包括:
5.根据权利要求4所述的电机驱动控制装置,其特征在于,根据当前时刻的电机转速差值、前一时刻的电机转速差值和前一时刻的防滑扭矩输出绝对值,基于比例-积分算法得到当前时刻的防滑扭矩输出绝对值包括:
6.根据权利要求1所述的电机驱动控制装置,其特征在于,根据所述防滑扭矩输出指令值和电机扭矩请求值得到防滑扭矩执行值包括:
7.根据权利要求6所述的电机驱动控制装置,其特征在于,在计算所述防滑扭矩执行值之前,还基于所述电机扭矩请求值对所述防滑扭矩输出指令值进行边界值校验。
8.一种电机驱动控制方法,包括:
9.根据权利要求8所述的电机驱动控制方法,其特征在于,基于所述电机转速、电机扭矩请求值和主动防滑状态对应的电机限速值计算得到防滑扭矩输出指令值包括:
10.根据权利要求9所述的电机驱动控制方法,其特征在于,基于当前时刻的电机转速对应的方向指示符和电机扭矩请求值对应的方向指示符得到防滑扭矩输出指令值对应的方向指示符。
11.根据权利要求9所述的电机驱动控制方法,其特征在于,根据当前时刻的电机转速差值、前一时刻的电机转速差值和前一时刻的防滑扭矩输出指令值生成当前时刻的防滑扭矩输出绝对值包括:
12.根据权利要求11所述的电机驱动控制方法,其特征在于,根据当前时刻的电机转速差值、前一时刻的电机转速差值和前一时刻的防滑扭矩输出绝对值,基于比例-积分算法得到当前时刻的防滑扭矩输出绝对值包括:
13.一种电机驱动控制系统,包括如权利要求1-7任一项所述的电机驱动控制装置;以及晶体管功率模块;
14.一种车辆行驶控制系统,包括如权利要求1-7任一项所述的电机驱动控制装置;以及整车控制器;
15.根据权利要求14所述的车辆行驶控制系统,其特征在于,所述整车控制器被配置为:
16.根据权利要求14所述的车辆行驶控制系统,其特征在于,所述整车控制器还被配置为:
技术总结
本发明提供一种电机驱动控制装置、方法、系统和车辆行驶控制系统,电机驱动控制装置包括:电机转速生成模块,用于基于电机转速传感信号,计算得到电机转速;防滑扭矩生成模块,被配置为:接收电机扭矩请求值和主动防滑状态对应的电机限速值;基于所述电机转速、电机扭矩请求值和主动防滑状态对应的电机限速值计算得到当前时刻的防滑扭矩输出指令值;扭矩确定模块,被配置为:根据所述防滑扭矩输出指令值和电机扭矩请求值得到防滑扭矩执行值;电机控制模块,用于根据所述防滑扭矩执行值,生成电机驱动控制信号。本发明能够实现电机目标扭矩的精准计算,从而实现车辆行驶时较佳的防滑功能。
技术研发人员:杨志宏,余洲
受保护的技术使用者:采埃孚股份公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!