一种带桨叶的螺旋推进装置
本技术涉及推进器,涉及一种带桨叶的螺旋推进装置。
背景技术:
1、水陆两栖机器人具备多种运动模式,能够同时适应水域与陆地两种环境,已经投入使用到很多大型工程项目与特种作业中,在众多领域发挥了至关重要的作用。为了实现跨介质运动,机器人往往需要多套推进装置。
2、目前,水陆两栖的推进系统多为水下推进器与陆地移动机构的结合,移动机构通常有履带式、轮式、腿式三种机构。如发明专利公开了cn201710501933.2公开了一种水陆两栖机器人采用了轮子和水中推进系统实现多介质运动;如实用新型专利cn202022354276.3公开了一种履带与桨分层布局的水陆两栖机器人;如实用新型专利cn202221124074.2公开了一种变矢量推进的游走双模两栖机器人,同时具备矢量推进和机械腿机构。这些两栖机器人的推进系统均采用了不同推进装置结合的形式,存在结构复杂、重量大、能耗高的问题,同时也增加了控制的难度,可靠性难以保障。
3、螺旋推进的广泛应用验证了其驱动机制能够适应各种复杂地形,并且不需要结合其他机构即可实现跨介质运动,如发明专利cn201710271940.8公开了一种螺旋推进式管道机器人,相比于传统水陆两栖的推进系统,螺旋推进结构简单、结构轻便、易于控制、稳定性好。
4、然而在水中机动时,螺旋推进的转速较低,推进效率低于矢量推进,因此,需要一种能够实现底栖与陆地爬行、水面与水下浮游的跨介质螺旋推进装置,并要解决其水中推进效率不足的技术难点。
技术实现思路
1、针对现有技术中存在的问题,本实用新型提供了一种带桨叶的螺旋推进装置,实现了矢量推进与螺旋推进的结合,大大增加推进效率。
2、为实现上述目的,本实用新型提供如下技术方案:
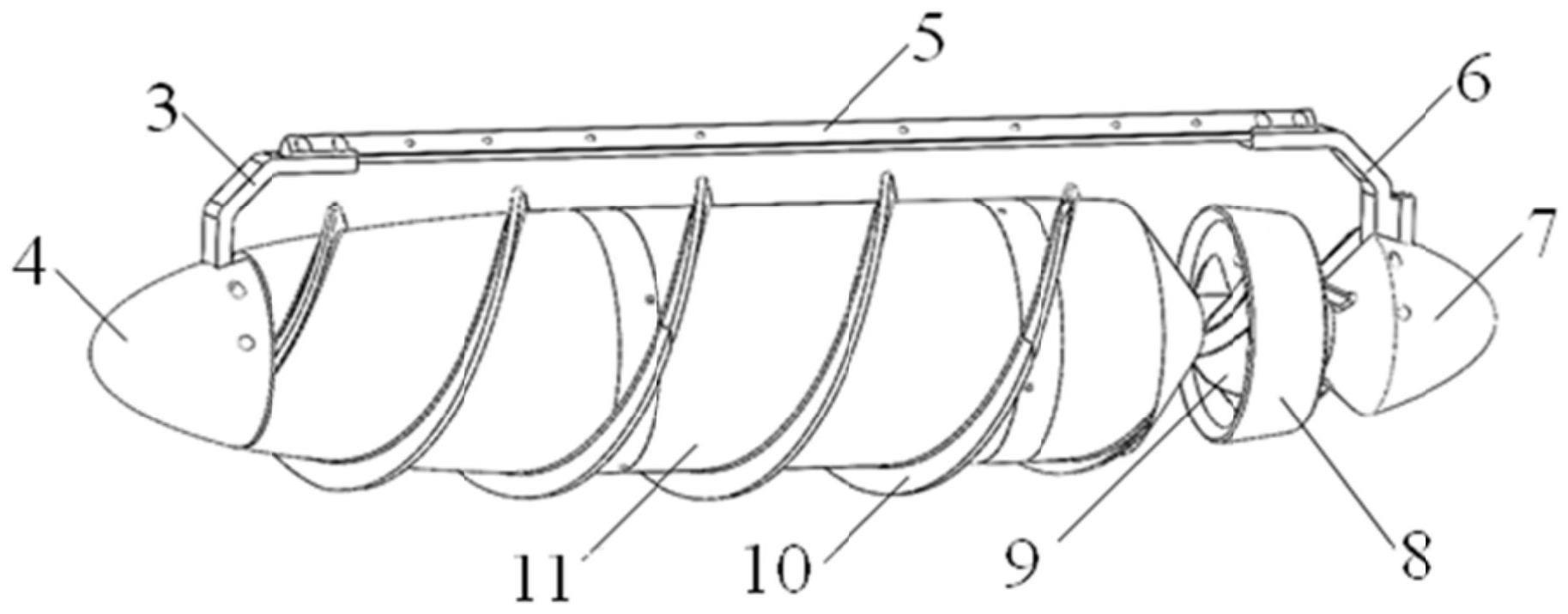
3、一种带桨叶的螺旋推进装置,包括依次设置的前端盖、螺旋体以及后端盖;所述螺旋体包括内部呈空心设置的螺旋体外壳和旋绕设置于螺旋体外壳上的螺旋叶片,所述螺旋体内设置有电机、传动机构以及轴,所述电机与轴固定连接,所述传动机构与螺旋体外壳的内壁固定连接,所述轴的两端分别与前端盖、后端盖固定连接,所述电机为动力单元通过传动机构带动螺旋体旋转,电机工作时,电机、轴、前端盖以及后端盖保证不动,仅螺旋体旋转运动;所述螺旋体外壳的尾部作收缩设置,并固定设置有桨叶,这样桨叶能够与螺旋体同步转动;所述后端盖包括设置于尾部的后端盖本体和设置于后端盖本体与螺旋体之间的后端盖前缘,所述后端盖前缘位于桨叶的外圆周处,后端盖前缘与后端盖本体连接在一起,在螺旋体外壳旋转时,后端盖前缘与后端盖本体一起保持不动,充当整流罩的作用,螺旋体尾部的桨叶与后端盖前缘组合起来形成矢量推进,通过后端盖的前缘与转动的桨叶形成的矢量推进与螺旋体本身螺旋推进的结合,显著提高了螺旋体在水中的推进效率。
4、进一步地,所述螺旋叶片为基于阿基米德螺旋线叶片。
5、进一步地,所述轴为中空轴,内部用于穿电器的线缆。
6、进一步地,所述桨叶为4片或6片或8片。
7、进一步地,桨叶的尺寸设计为与螺旋体的整体流线型适配的设置,不影响机器人爬行性能,桨叶与螺旋体外壳同步转动,能够提高推进效率。
8、进一步地,为了减小水中运动时的阻力,所述螺旋推进装置整体呈椭球体形;为了适配螺旋推进装置的整体外形,所述前端盖和后端盖本体呈圆锥体形。
9、进一步地,本实用新型的螺旋推进装置还包括支架,所述支架用于与机器人本体连接,一端与前端盖连接,另一端与后端盖本体连接。所述机器人本体为水陆两栖机器人本体。
10、进一步地,所述支架包括前轴固定架、纵梁以及后轴固定架;所述前轴固定架一端与前端盖的上部连接,另一端与纵梁的一端连接;所述后轴固定架一端与后端盖本体的上部连接,另一端与纵梁的另一端连接;所述纵梁与机器人本体连接。
11、进一步地,所述螺旋推进装置有2个,对称布置,作为水陆两栖机器人的推进系统使用。
12、与现有技术相比,本实用新型提供了一种带桨叶的螺旋推进装置,具备以下有益效果:
13、(1)本实用新型的螺旋推进装置将桨叶叶片与螺旋体尾部的外壳固结,与固定不动的后端盖组合形成水下推进器,实现了矢量推进与螺旋推进的结合,大大增加推进效率。
14、(2)本实用新型螺旋推进装置能够适应底栖与陆地爬行、水面与水下浮游的跨介质运动,结构简单、操纵简便、稳定性好,可作为水陆两栖机器人动力单元和行走机构,能够实现底栖与陆地爬行、水面与水下浮游。
技术特征:
1.一种带桨叶的螺旋推进装置,其特征在于:包括依次设置的前端盖、螺旋体以及后端盖;所述螺旋体包括内部呈空心设置的螺旋体外壳和旋绕设置于螺旋体外壳上的螺旋叶片,所述螺旋体内设置有电机、传动机构以及轴,所述电机与轴固定连接,所述传动机构与螺旋体外壳的内壁固定连接,所述轴的两端分别与前端盖、后端盖固定连接,所述电机为动力单元通过传动机构带动螺旋体旋转;所述螺旋体外壳的尾部作收缩设置,并固定设置有桨叶;所述后端盖包括设置于尾部的后端盖本体和设置于后端盖本体与螺旋体之间的后端盖前缘,所述后端盖前缘位于桨叶的外圆周处。
2.根据权利要求1所述的一种带桨叶的螺旋推进装置,其特征在于:所述轴为中空轴。
3.根据权利要求1所述的一种带桨叶的螺旋推进装置,其特征在于:所述桨叶为4片或6片或8片。
4.根据权利要求1所述的一种带桨叶的螺旋推进装置,其特征在于:所述螺旋推进装置整体呈椭球体形;所述前端盖和后端盖本体呈圆锥体形。
5.根据权利要求1所述的一种带桨叶的螺旋推进装置,其特征在于:还包括支架,所述支架用于与机器人本体连接,一端与前端盖连接,另一端与后端盖本体连接。
6.根据权利要求5所述的一种带桨叶的螺旋推进装置,其特征在于:所述支架包括前轴固定架、纵梁以及后轴固定架;所述前轴固定架一端与前端盖的上部连接,另一端与纵梁的一端连接;所述后轴固定架一端与后端盖本体的上部连接,另一端与纵梁的另一端连接;所述纵梁与机器人本体连接。
7.根据权利要求1所述的一种带桨叶的螺旋推进装置,其特征在于:所述螺旋推进装置有2个,对称布置。
技术总结
本技术涉及推进器技术领域,公开了一种带桨叶的螺旋推进装置,包括依次设置的前端盖、螺旋体以及后端盖;所述螺旋体包括内部呈空心设置的螺旋体外壳和旋绕设置于螺旋体外壳上的螺旋叶片,所述螺旋体内设置有电机、传动机构以及轴,所述电机与轴固定连接,所述传动机构与螺旋体外壳的内壁固定连接,所述轴的两端分别与前端盖、后端盖固定连接,电机为动力单元通过传动机构带动螺旋体旋转;所述螺旋体外壳的尾部作收缩设置,并固定设置有桨叶;所述后端盖包括设置于尾部的后端盖本体和设置于后端盖本体与螺旋体之间的后端盖前缘,所述后端盖前缘位于桨叶的外圆周处。本技术的有益效果为实现了矢量推进与螺旋推进的结合,大大增加推进效率。
技术研发人员:徐鹏飞,开艳,王逸生,孙承锐,程红霞,林海龙
受保护的技术使用者:河海大学
技术研发日:20230303
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!