轨道机器人的充电桩及轨道机器人系统的制作方法
本技术涉及机器人领域,具体而言,涉及一种轨道机器人的充电桩及轨道机器人系统。
背景技术:
1、随着电厂智能化发展的需求,巡检机器人能够代替工作人员进行巡检并提前预知风险,成为极具发展潜力的产品。
2、巡检机器人一般通过电池提供电力。当巡检机器人电量耗尽时,需要通过充电桩为其内部的电源进行充电。
3、目前,对于位于高处的轨道机器人来说,充电桩一般体积较大,导致成本较高。
技术实现思路
1、本实用新型的主要目的在于提供一种轨道机器人的充电桩及轨道机器人系统,以解决现有技术中轨道机器人的充电桩成本高的问题。
2、为了实现上述目的,根据本实用新型的一个方面,提供了一种轨道机器人的充电桩,包括:支架本体,具有连接位以及安装位;位置调节机构,设置于连接位处,支架本体通过位置调节机构高度可调节地设置于轨道的支撑柱上;充电座,包括设置于安装位的座本体以及设置于座本体上并上下间隔布置的阴极充电头和阳极充电头。
3、在一个实施方式中,位置调节机构包括连接板以及箍筋,箍筋的两端穿设于连接板上并通过螺母固定,箍筋与连接板围成容纳支撑柱的容纳空间。
4、在一个实施方式中,箍筋为上下间隔布置的多个。
5、在一个实施方式中,支架本体由多根型材连接而成。
6、在一个实施方式中,阴极充电头和阳极充电头可伸缩地设置。
7、在一个实施方式中,座本体为箱体,阴极充电头和阳极充电头由箱体穿出,箱体上还设置有过线孔,与阴极充电头和阳极充电头连接的导线由过线孔穿出。
8、在一个实施方式中,充电桩还包括:挡雨板,设置于座本体的顶部,以遮蔽充电座。
9、在一个实施方式中,座本体为箱体,箱体包括靠近于轨道的第一侧面以及背离轨道的第二侧面,阴极充电头和阳极充电头由第一侧面穿出,挡雨板的靠近于第二侧面的边缘处设置有导水板,导水板在第一侧面至第二侧面的方向上逐渐向下倾斜。
10、在一个实施方式中,座本体包括向上延伸的安装立板,挡雨板连接于安装立板的顶部。
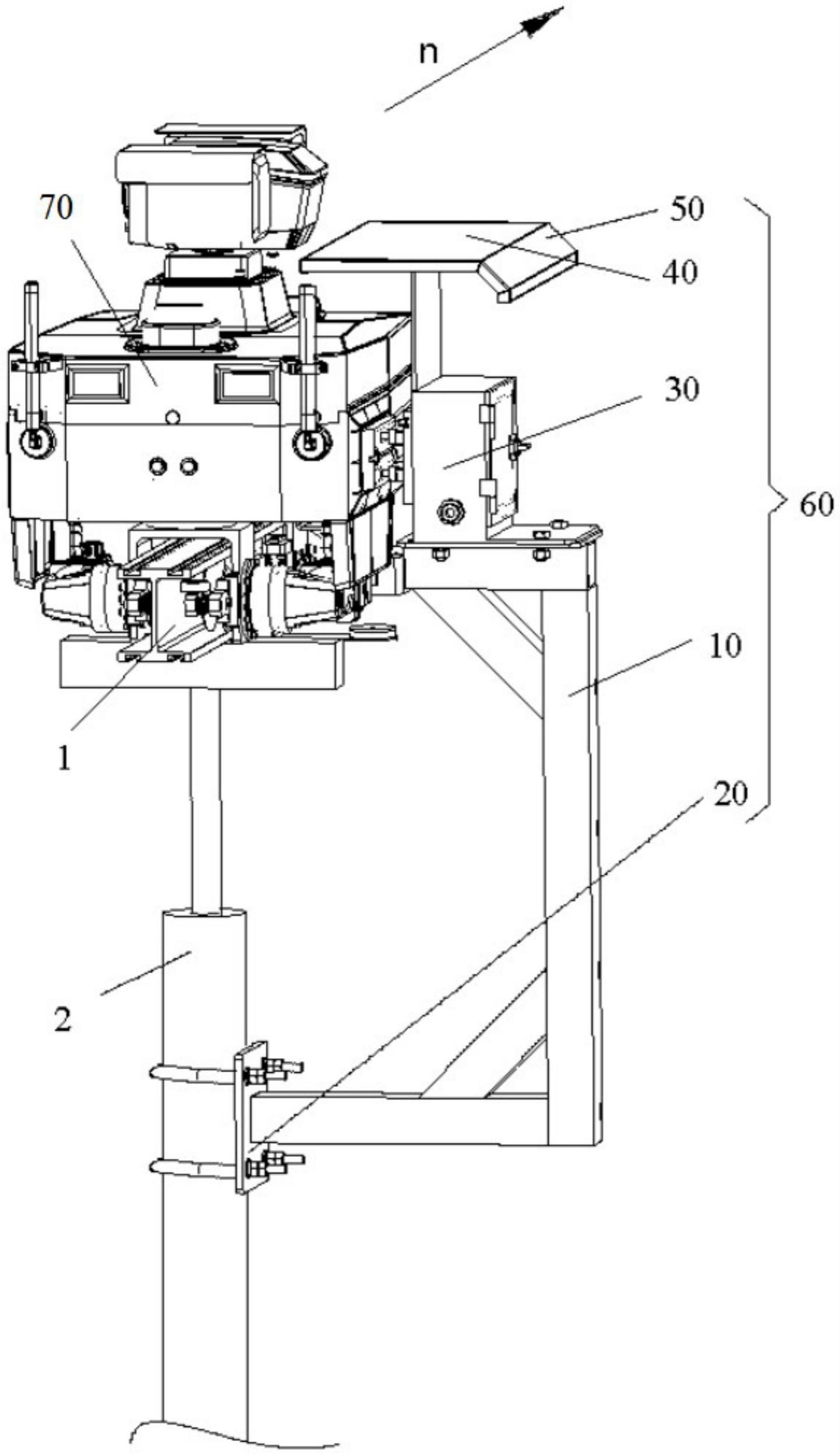
11、根据本实用新型的另一方面,提供了一种轨道机器人系统,包括:机器人,机器人的垂直于其行进方向n的侧面上设置有充电阴极和充电阳极;充电桩,充电桩为上述的充电桩,充电桩的阴极充电头可与充电阴极接触,充电桩的阳极充电头可与充电阳极接触。
12、根据本实用新型的又一方面,提供了一种轨道机器人系统,包括:机器人,机器人的垂直于其行进方向n的侧面上设置有充电阴极和充电阳极;充电桩,充电桩为上述的充电桩,充电桩的阴极充电头可与充电阴极接触,充电桩的阳极充电头可与充电阳极接触,充电桩的挡雨板遮蔽至少部分机器人。
13、应用本实用新型的技术方案,在安装充电桩时,通过位置调节机构调节充电桩的高度。当充电座能够与轨道机器人的充电装置相对时,再通过位置调节机构将支架本体固定于支撑柱上。上述结构将充电桩安装在已存在的较高的支撑柱上,因此充电桩的高度能够被有效减小,从而降低了充电桩的生产成本。此外,应用本实用新型的技术方案,针对于不同高度的轨道,可以通过位置调节机构调节充电座与轨道机器人的相对位置,因此,充电桩能够为行走于不同高度的轨道上的轨道机器人进行充电,通用性较强。
14、除了上面所描述的目的、特征和优点之外,本实用新型还有其它的目的、特征和优点。下面将参照图,对本实用新型作进一步详细的说明。
技术特征:
1.一种轨道机器人的充电桩,其特征在于,包括:
2.根据权利要求1所述的充电桩,其特征在于,所述位置调节机构(20)包括连接板(21)以及箍筋(22),所述箍筋(22)的两端穿设于所述连接板(21)上并通过螺母(23)固定,所述箍筋(22)与所述连接板(21)围成容纳所述支撑柱(2)的容纳空间。
3.根据权利要求2所述的充电桩,其特征在于,所述箍筋(22)为上下间隔布置的多个。
4.根据权利要求1所述的充电桩,其特征在于,所述支架本体(10)由多根型材连接而成。
5.根据权利要求1所述的充电桩,其特征在于,所述阴极充电头(32)和阳极充电头(33)可伸缩地设置。
6.根据权利要求1所述的充电桩,其特征在于,所述座本体(31)为箱体,所述阴极充电头(32)和所述阳极充电头(33)由所述箱体穿出,所述箱体上还设置有过线孔(311),与所述阴极充电头(32)和所述阳极充电头(33)连接的导线由所述过线孔(311)穿出。
7.根据权利要求1至6中任一项所述的充电桩,其特征在于,所述充电桩还包括:
8.根据权利要求7所述的充电桩,其特征在于,所述座本体(31)为箱体,所述箱体包括靠近于所述轨道(1)的第一侧面以及背离所述轨道(1)的第二侧面,所述阴极充电头(32)和所述阳极充电头(33)由所述第一侧面穿出,所述挡雨板(40)的靠近于所述第二侧面的边缘处设置有导水板(50),所述导水板(50)在所述第一侧面至所述第二侧面的方向上逐渐向下倾斜。
9.根据权利要求7所述的充电桩,其特征在于,所述座本体(31)包括向上延伸的安装立板(312),所述挡雨板(40)连接于所述安装立板(312)的顶部。
10.一种轨道机器人系统,其特征在于,包括:
11.一种轨道机器人系统,其特征在于,包括:
技术总结
本技术提供了一种轨道机器人的充电桩及轨道机器人系统,其中,轨道机器人的充电桩,包括:支架本体、支架本体以及位置调节机构。支架本体具有连接位以及安装位;位置调节机构设置于连接位处,支架本体通过位置调节机构高度可调节地设置于轨道的支撑柱上;充电座包括设置于安装位的座本体以及设置于座本体上并上下间隔布置的阴极充电头和阳极充电头。应用本技术的技术方案能够有效地解决现有技术中轨道机器人的充电桩成本高的问题。
技术研发人员:菅磊,徐立,李志远,吴礼明,智效龙
受保护的技术使用者:北京能工荟智机器人有限责任公司
技术研发日:20230324
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!