一种车间物流机器人的制作方法
本技术具体涉及车间物流,具体是一种车间物流机器人。
背景技术:
1、在大型生产制造车间中,原材料及半成品的数量极大,且大量的原材料及半成品在加工时需要不断地将其运输到生产线或者生产设备上,原材料及半成品的体积与重量不尽相同,在搬运过程中给工作人员带来了极大的困难,增加了工作人员的工作量的同时还大大降低了原材料及半成品的运输效率,为此,提供一种车间物流机器人。
2、中国专利申请号cn115520590a公开了一种车间物流机器人,通过在基板的下侧活动设置触动杆,在所述车间物流机器人前进或是后退遇到障碍物时,触动板先触碰到障碍物,在惯性之下,触动杆被朝前进反向相反的方向运动,带动第一转动伸缩杆伸长并转动,第一转动伸缩杆带动第一转动套筒转动从而使得第二转动伸缩杆转动并伸长,使得基杆朝前进方向运动,带动驱动万向轮伸出至基板的外侧以提供支撑。
3、但是在实际使用中,上述的一种车间物流机器人的搬运筐的体积很大,在放满货物后,上述的一种车间物流机器人的整体会出现头重脚轻的状况,在移动的过程中,当遇到颠簸或者碰撞时,上述的一种车间物流机器人的搬运筐在重力的影响下很容易发生侧翻,从而导致物流机器人发生倾倒;此外,上述的一种车间物流机器人,相比于物流机器人的整体体积,其万向轮的直径过小,导致物流机器人整体移动速度过慢的同时还大大降低了物流机器人移动时的稳定性;再有,上述的一种车间物流机器人用于连接搬运筐和基板的固定杆和支杆过于单薄,当搬运筐内放置的货物重量太大时,固定杆和支杆容易承受不住压力而发生变形甚至断裂,严重影响物流机器人的正常使用。
技术实现思路
1、本实用新型的目的在于提供一种车间物流机器人,以解决上述的一种车间物流机器人的搬运筐的体积很大,在放满货物后,上述的一种车间物流机器人的整体会出现头重脚轻的状况,在移动的过程中,当遇到颠簸或者碰撞时,上述的一种车间物流机器人的搬运筐在重力的影响下很容易发生侧翻,从而导致物流机器人发生倾倒;此外,上述的一种车间物流机器人,相比于物流机器人的整体体积,其万向轮的直径过小,导致物流机器人整体移动速度过慢的同时还大大降低了物流机器人移动时的稳定性;再有,上述的一种车间物流机器人用于连接搬运筐和基板的固定杆和支杆过于单薄,当搬运筐内放置的货物重量太大时,固定杆和支杆容易承受不住压力而发生变形甚至断裂,严重影响物流机器人的正常使用的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
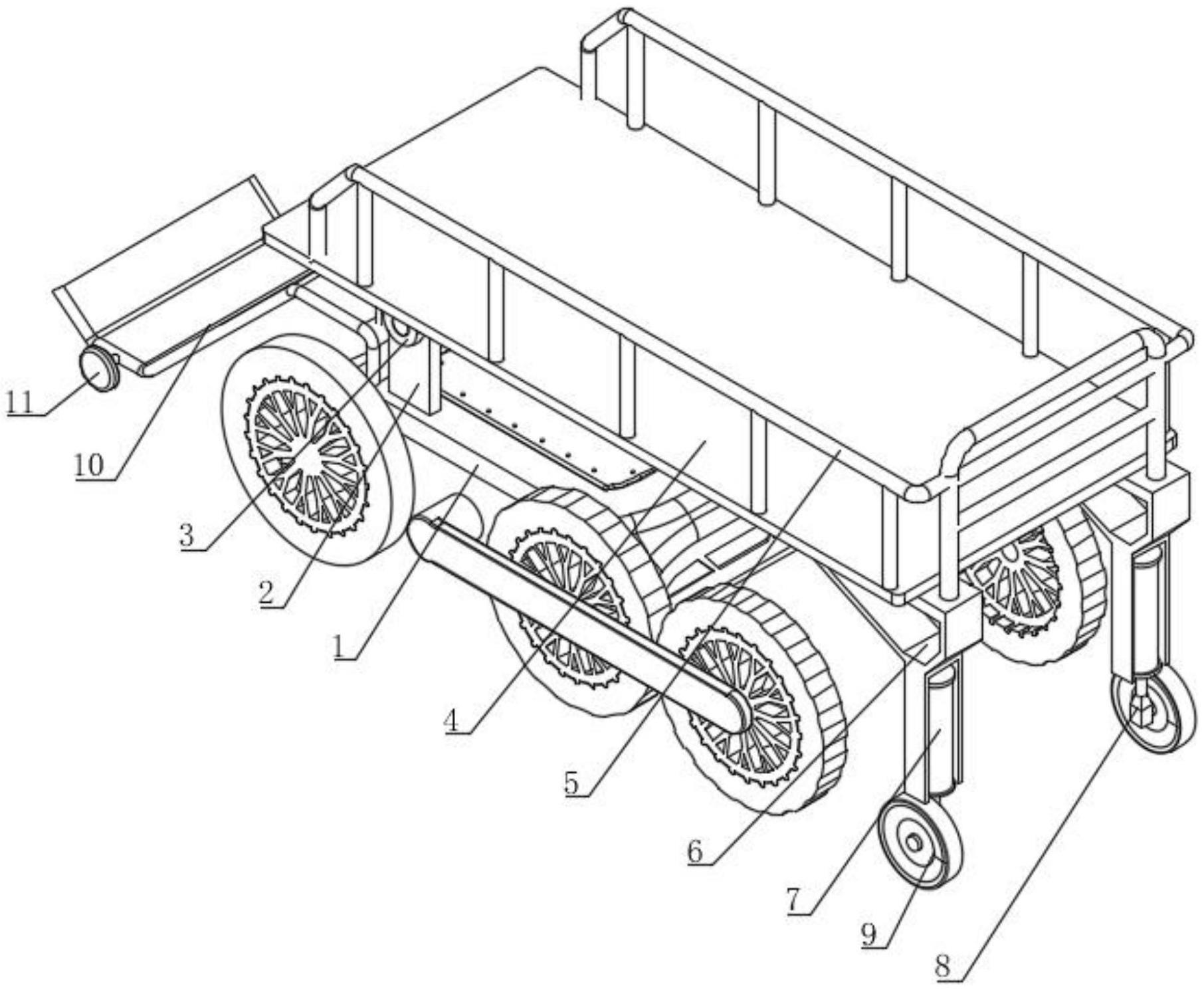
3、一种车间物流机器人,包括载物平台,该载物平台的下方设有一个载物车;所述的载物平台的底部两侧均焊接有一个旋转柱;所述的载物车的底部两侧均焊接有一个连接柱,且两个连接柱的位置与两个旋转柱的位置相对应;两个所述的旋转柱分别与两个连接柱旋转连接;
4、所述的载物平台的一端底部两侧均焊接有一个支架,两个支架的内侧均设有一个液压缸;两个液压缸的伸缩杆顶部分别与两个支架焊接;两个所述的液压缸的底部均固定连接有一个语言模块,且两个语言模块互相远离的一侧均旋转连接有一个滚轮。
5、作为本实用新型的进一步技术方案,所述的载物车远离两个液压缸的一端设有一个滑板,该滑板靠近的载物车的一端的两侧均通过螺栓与所述的载物车固定连接。
6、作为本实用新型的进一步技术方案,所述的滑板靠近载物车的一端呈倾斜状,且该滑板远离载物车的一端呈钩状弯曲;所述的滑板远离载物车一端的两侧均旋转连接有一个辅助轮。
7、作为本实用新型的进一步技术方案,所述的滑板的整体高度低于载物平台的高度,且滑板的宽度与载物平台的宽度相同。
8、作为本实用新型的进一步技术方案,所述的载物平台的顶部焊接有护栏;所述的护栏位于载物平台远离滑板的一端以及与该端相邻的两个侧边上。
9、作为本实用新型的进一步技术方案,所述的载物平台的长度与所述的载物车的长度相同,且该载物平台的宽度小于所述的载物车的宽度。
10、与现有技术相比,本实用新型的有益效果是:
11、1、本实用新型,使用时,将需要搬运的货物放置到本车间物流机器人的载物平台上,然后在载物车的带动下,本车间物流机器人进行移动搬运货物,与一般通过万向轮移动的物流机器人相比,本载物车的两侧均设有三个车轮,且六个车轮的着地面积大、抓地力强,让载物车快速移动的同时还能够保证物流机器人整体的平稳形,能够杜绝物流机器人发生侧翻的可能性;此外,本车间物流机器人的载物平台与载物车的间距很小,当载物平台承载货物时,本车间物流机器人不会发生头重脚轻的状况,进一步降低了本车间物流机器人发生侧翻的可能性;本车间物流机器人在承载重物移动时,载物平台一端的支架能够分担载物平台所承受的压力,支架下方的滚轮让车间物流机器人移动的更加顺滑的同时也能够分担载物平台承重压力,大大降低了载物平台因为货物过重而损坏的几率;车间物流机器人卸载货物时,两个液压缸分别将两个支架向上顶动,两个液压缸在运作的时候,其下方的语言模块能够配合液压缸进行运作,两个支架则同步带动载物平台的一端向上移动,让载物平台整体呈倾斜状,载物平台上的货物在重力的影响下从载物平台上滑落,过程中不需要工作人员操作,保障工作人员的安全的同时还降低了工作人员劳动量;
12、2、本实用新型,载物平台倾斜后,载物平台上的货物在重力的影响下会从载物平台上滑落到滑板上,在由滑板上的倒钩状结构将货物固定住,滑板作为缓冲部件,能够降低载物平台上滑落的货物的滑落速度,同时滑板倒钩状的一端还能够将货物固定,能够有效防止货物发生损坏;
13、3、本实用新型,本车间物流机器人在运输货物的过程中,载物平台上的护栏起到保护货物的作用,防止货物发生位移或者从载物平台上掉落,在载物平台倾斜卸载货物时,护栏也能够起到防止货物从载物平台上掉落的可能;
14、4、本实用新型,载物平台的宽度小于载物车的宽度,在承载重物时,进一步降低了本车间物流机器人因为头重脚轻而导致侧翻的可能,保证车间物流机器人的正常使用。
技术特征:
1.一种车间物流机器人,其特征在于:包括载物平台(4),该载物平台(4)的下方设有一个载物车(1);所述的载物平台(4)的底部两侧均焊接有一个旋转柱(3);所述的载物车(1)的底部两侧均焊接有一个连接柱(2),且两个连接柱(2)的位置与两个旋转柱(3)的位置相对应;两个所述的旋转柱(3)分别与两个连接柱(2)旋转连接;
2.根据权利要求1所述的一种车间物流机器人,其特征在于:所述的载物车(1)远离两个液压缸(7)的一端设有一个滑板(10),该滑板(10)靠近的载物车(1)的一端的两侧均通过螺栓与所述的载物车(1)固定连接。
3.根据权利要求2所述的一种车间物流机器人,其特征在于:所述的滑板(10)靠近载物车(1)的一端呈倾斜状,且该滑板(10)远离载物车(1)的一端呈钩状弯曲;所述的滑板(10)远离载物车(1)一端的两侧均旋转连接有一个辅助轮(11)。
4.根据权利要求3所述的一种车间物流机器人,其特征在于:所述的滑板(10)的整体高度低于载物平台(4)的高度,且滑板(10)的宽度与载物平台(4)的宽度相同。
5.根据权利要求4所述的一种车间物流机器人,其特征在于:所述的载物平台(4)的顶部焊接有护栏(5);所述的护栏(5)位于载物平台(4)远离滑板(10)的一端以及与该端相邻的两个侧边上。
6.根据权利要求5所述的一种车间物流机器人,其特征在于:所述的载物平台(4)的长度与所述的载物车(1)的长度相同,且该载物平台(4)的宽度小于所述的载物车(1)的宽度。
技术总结
本技术公开了一种车间物流机器人,涉及车间物流技术领域,包括载物平台,该载物平台的下方设有一个载物车;所述的载物平台的底部两侧均焊接有一个旋转柱;所述的载物车的底部两侧均焊接有一个连接柱,且两个连接柱的位置与两个旋转柱的位置相对应;两个所述的旋转柱分别与两个连接柱旋转连接;载物平台倾斜后,载物平台上的货物在重力的影响下会从载物平台上滑落到滑板上,在由滑板上的倒钩状结构将货物固定住,滑板作为缓冲部件,能够降低载物平台上滑落的货物的滑落速度,同时滑板倒钩状的一端还能够将货物固定,能够有效防止货物发生损坏。
技术研发人员:朱昕华
受保护的技术使用者:上海聿冠智能科技有限公司
技术研发日:20230410
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!