一种轮对转运AGV的制作方法
本技术涉及转运agv领域。
背景技术:
1、随着物流行业发展智能仓储搭配智能转运agv被广泛应用,现有常见智能转运agv其行走轮驱动机构通常是电机减速器驱动,为实现转向,将智能转运agv的走轮驱动机构设置为分别驱动的两组,通过两组驱动的转速差可实现智能转运agv转向,但是这种智能转运agv转向是agv整体车身有转向变化,需要周围环境相对车身宽阔才能进行转向,通常适用于道路宽阔、地面平整或底面路障极低环境应用。
2、对于在铁轨上的货运火车轮对的转运,目前主要由人工在铁轨上完成,在铁轨上特制的与铁轨相接的转盘,人工将轮对在铁轨上推行至该转盘,通过转盘转动旋转方向以进行后续转运进行,人工进行操作劳动强大、效率低存在工作安全风险等问题,如果要采用智能转运agv,该转运agv需要能够适应承载可托举轮对脱离铁轨的结构设置和适应有铁轨地面环境内能够灵活行进、转向等的结构设置,但是现有的多数智能转运agv在承载轮对、灵活行进转向、越障上都不能达到较好的灵活适用。有鉴于此,本案发明人在现有转运agv的结构基础上进行研究改进,遂有本案产生。
技术实现思路
1、本实用新型的目的在于提供一种可有效可靠代替人工操作,且可灵活转运应用的一种轮对转运agv。
2、为实现上述目的,本实用新型的技术方案是:一种轮对转运agv,包括车身主体及安装设置在车身主体上移动模块、智能导向模块、所述车身主体上还安装设置有轮对顶升模块,所述移动模块包括驱动轮机构,所述驱动轮机构为可转向舵轮驱动机构,所述轮对顶升模块包括有供平稳定位放置轮对的顶升放置部件。
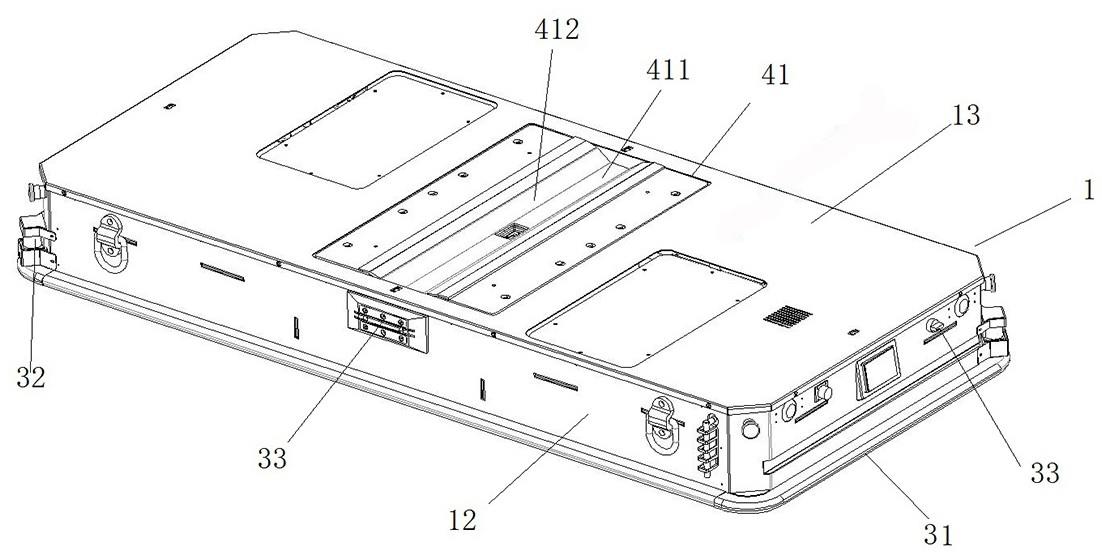
3、所述车身主体为适应在铁轨之间并且在铁轨上的轮对下方之间移动的扁平方形体框架结构,其包括底盘板、围合在底盘板周围的边框和覆盖在底盘板上方的盖板,所述底盘板上表面中间部向下表面方向下凹形成供轮对顶升模块嵌入安装设置的顶升安装腔,所述盖板上设有供轮对顶升模块升降活动的通孔,所述底盘板下表面对应顶升安装腔相对两侧形成供移动模块安装设置的移动安装空间,所述移动模块还包括有平衡支撑布设在移动安装空间内的万向轮,所述可转向舵轮驱动机构分别在两移动安装空间内各设置一组并且两组为在相对角的位置布设。
4、所述可转向舵轮驱动机构通过悬架结构连接在车身主体上,所述悬架结构包括舵轮安装板、锁固板、调节板、导向轴、直线轴承和圆柱压缩弹簧,所述锁固板对应舵轮安装板两端下方分别设置并锁固在底盘板上,所述调节板对应两锁固板下方分别设置,所述锁固板上分别固定设置有所述直线轴承,所述导向轴对应各直线轴承分别布设,其上端固定连接在舵轮安装板上,下端连接在对应的调节板上,所述直线轴承套设在对应的导向轴两端之间,所述圆柱压缩弹簧对应各导向轴分别设置,并套设在对应的锁固板与调节板之间的导向轴上,所述可转向舵轮驱动机构的上端安装在两锁固板之间的舵轮安装板上。
5、顶升放置部件为一平板块,其上表面设有定位放置槽,所述定位放置槽的相对两侧面构成v形状定位面,所述定位放置槽的两端为贯穿开放端。
6、所述轮对顶升模块还包括固定安装设置在底盘板上的丝杆传动机构、下部安装连接在底盘板上的剪叉升降机构和用于感应剪叉升降机构升降动作的传感装置,所述顶升放置部件连接设置在剪叉升降机构的升降上端,所述剪叉升降机构由丝杆传动机构传动实现升降动作。
7、所述智能导向模块包括磁感巡航单元。
8、所述智能导向模块包括有自主避障单元,所述自主避障单元包括设置在车身主体边框一周的裙带触碰开关、在车身主体边框对角处分别设置的单线激光雷达、在车身主体边框的前后左右侧面分别设置的光电传感器。
9、通过采用上述技术方案,本实用新型的有益效果是:1、上述结构一种轮对转运agv其设有轮对顶升模块,轮对顶升模块具有可供平稳定位放置轮对的顶升放置部件,因此可以稳定承载轮对,可以承载轮对顶升离开铁轨,以进行转运。2、上述结构一种轮对转运agv采用两个可旋转方向驱动舵轮,可以向任意方向行走平移,即车身主体不跟随行走转向而转动方向,并且可以原地转弯,因此可以承载轮对比较灵活的在不同场景环境内转运。3、可转向舵轮驱动机构采用了悬架结构,可跨越轨道行驶,越障能力较强。4、采用单线激光雷达和近距离的裙带触碰开关、光电传感器等避障,安全性能较高。5、采用磁感巡航单元,即通过磁条导航方式自动寻迹搭配磁扣定位,可以沿着设定好的路线实现自动化转运工作。综上,从而实现本实用新型的上述的目的。
技术特征:
1.一种轮对转运agv,包括车身主体及安装设置在车身主体上移动模块、智能导向模块、其特征在于,所述车身主体上还安装设置有轮对顶升模块,所述移动模块包括驱动轮机构,所述驱动轮机构为可转向舵轮驱动机构,所述可转向舵轮驱动机构通过悬架结构连接在车身主体上,所述轮对顶升模块包括有供平稳定位放置轮对的顶升放置部件。
2.如权利要求1所述的一种轮对转运agv,其特征在于,所述车身主体为适应在铁轨之间并且在铁轨上的轮对下方之间移动的扁平方形体框架结构,其包括底盘板、围合在底盘板周围的边框和覆盖在底盘板上方的盖板,所述底盘板上表面中间部向下表面方向下凹形成供轮对顶升模块嵌入安装设置的顶升安装腔,所述盖板上设有供轮对顶升模块升降活动的通孔,所述底盘板下表面对应顶升安装腔相对两侧形成供移动模块安装设置的移动安装空间,所述移动模块还包括有平衡支撑布设在移动安装空间内的万向轮,所述可转向舵轮驱动机构分别在两移动安装空间内各设置一组并且两组为在相对角的位置布设。
3.如权利要求2所述的一种轮对转运agv,其特征在于,所述悬架结构包括舵轮安装板、锁固板、调节板、导向轴、直线轴承和圆柱压缩弹簧,所述锁固板对应舵轮安装板两端下方分别设置并锁固在底盘板上,所述调节板对应两锁固板下方分别设置,所述锁固板上分别固定设置有所述直线轴承,所述导向轴对应各直线轴承分别布设,其上端固定连接在舵轮安装板上,下端连接在对应的调节板上,所述直线轴承套设在对应的导向轴两端之间,所述圆柱压缩弹簧对应各导向轴分别设置,并套设在对应的锁固板与调节板之间的导向轴上,所述可转向舵轮驱动机构的上端安装在两锁固板之间的舵轮安装板上。
4.如权利要求1-3任意一项所述的一种轮对转运agv,其特征在于,顶升放置部件为一平板块,其上表面设有定位放置槽,所述定位放置槽的相对两侧面构成v形状定位面,所述定位放置槽的两端为贯穿开放端。
5.如权利要求4所述的一种轮对转运agv,其特征在于,所述轮对顶升模块还包括固定安装设置在底盘板上的丝杆传动机构、下部安装连接在底盘板上的剪叉升降机构和用于感应剪叉升降机构升降动作的传感装置,所述顶升放置部件连接设置在剪叉升降机构的升降上端,所述剪叉升降机构由丝杆传动机构传动实现升降动作。
6.如权利要求1-3任意一项所述的一种轮对转运agv,其特征在于,所述智能导向模块包括磁感巡航单元。
7.如权利要求5所述的一种轮对转运agv,其特征在于,所述智能导向模块包括磁感巡航单元。
8.如权利要求1-3任意一项所述的一种轮对转运agv,其特征在于,所述智能导向模块包括有自主避障单元,所述自主避障单元包括设置在车身主体边框一周的裙带触碰开关、在车身主体边框对角处分别设置的单线激光雷达、在车身主体边框的前后左右侧面分别设置的光电传感器。
9.如权利要求5所述的一种轮对转运agv,其特征在于,所述智能导向模块包括有自主避障单元,所述自主避障单元包括设置在车身主体边框一周的裙带触碰开关、在车身主体边框对角处分别设置的单线激光雷达、在车身主体边框的前后左右侧面分别设置的光电传感器。
技术总结
本技术公开一种轮对转运AGV,包括车身主体及安装设置在车身主体上移动模块、智能导向模块,所述车身主体上还安装设置有轮对顶升模块,所述移动模块包括驱动轮机构,所述驱动轮机构为可转向舵轮驱动机构,所述可转向舵轮驱动机构通过悬架结构连接在车身主体上,所述轮对顶升模块包括有供平稳定位放置轮对的顶升放置部件。该结构设置的轮对转运AGV可有效可靠代替人工操作,且可在有铁轨的环境下灵活转运应用。
技术研发人员:梁培栋,刘海洋,张大明,冯宝屹
受保护的技术使用者:泉州通维科技有限责任公司
技术研发日:20230508
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!