一种防爆机器人的减震悬挂装置的制作方法
本技术涉及防爆机器人,更具体地说,本实用涉及一种防爆机器人的减震悬挂装置。
背景技术:
1、为了满足防爆机器人不同位置的使用,一般会在其下方设置相应的行走轮,通过行走轮的驱动,使防爆机器人不同位置的防爆工作。
2、相关技术中,为了提高其防爆机器人行走的稳定性,以及满足不同不平地面的行走,一般会设置相应的减震悬挂。然而现有的机器人减震悬挂,一般是采用减震弹簧进行减震处理。然而减震弹簧在长期进行减震工作过程中,无论在颠簸较小或较大的环境下,其减震力度和效果是固定的,影响机器人的行走的稳定性。
技术实现思路
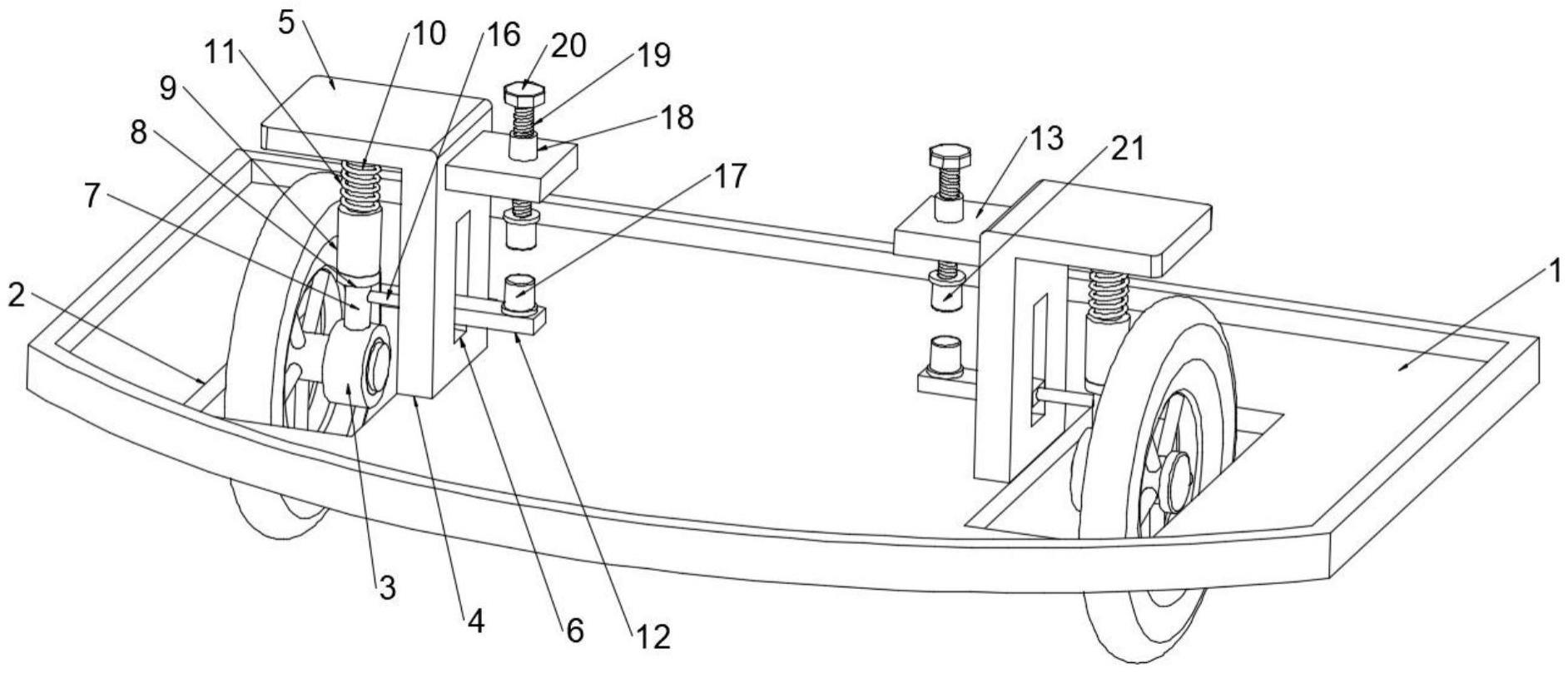
1、为解决上述技术问题,本实用新型提供一种防爆机器人的减震悬挂装置,包括底盘,在底盘上开设有用于容纳转轮的通槽,在轮胎的转轴端部套设有轴承,在轴承上方连接有减震机构,在位于通槽边缘处的底盘上表面安装有悬挂组件,减震机构的顶端连接在悬挂组件上,在悬挂组件远离转轮的一侧安装有减震调节件。
2、在一个优选地实施方式中,所述悬挂组件包括固定在底盘上表面的竖板,在竖板顶端设有向转轮一侧延伸的顶板,所述减震机构的顶端连接在顶板的下表面,在竖板的中部开设有一段竖直延伸的滑槽。
3、在一个优选地实施方式中,所述减震机构包括在轴承外壁上向上延伸的连杆,在连杆顶端安装有对接板,在对接板的上表面安装有套管,在套管内插接有上下升降活动的伸缩杆,伸缩杆的顶端与顶板下表面固定连接;
4、在伸缩杆外部套设有弹簧,弹簧顶端与顶板下表面连接以及底端与套管顶端连接。
5、在一个优选地实施方式中,所述减震调节件包括插接在滑槽内的下调节板和固定在竖板外壁上的上调节板,下调节板和上调节板向远离转轮的一侧延伸一段距离,在滑槽的内壁上开设有凹槽的限位槽,位于滑槽内部的下调节板外壁上安装有与限位槽相吻合的限位块。
6、在一个优选地实施方式中,在位于所述滑槽内部的下调节板端部安装有定位杆,定位杆的另一端与连杆外壁固定连接。
7、在一个优选地实施方式中,在下调节板端部的上表面安装有下铷磁铁,在上调节板端部的上表面安装有螺管,在螺管内插接有贯穿上调节板的螺杆,螺杆底端延伸至下铷磁铁的上方。
8、在一个优选地实施方式中,在所述螺杆顶端安装有旋钮,在螺杆底端安装有上铷磁铁,上铷磁铁与下铷磁铁的磁场方向相反。
9、本实用新型的技术效果和优点:
10、本实用新型可以根据防爆机器人工作场景和工作任务的不同,自由调节减震部分的弹力和相斥力,以改变产品的减震和缓冲性能,可适用于不同的工作环境,最大程度的降低环境对防爆机器人稳定行进的影响,降低故障率,提升使用寿命。
技术特征:
1.一种防爆机器人的减震悬挂装置,包括底盘,在底盘上开设有用于容纳转轮的通槽,在轮胎的转轴端部套设有轴承,在轴承上方连接有减震机构,在位于通槽边缘处的底盘上表面安装有悬挂组件,减震机构的顶端连接在悬挂组件上,在悬挂组件远离转轮的一侧安装有减震调节件。
2.根据权利要求1所述的一种防爆机器人的减震悬挂装置,其特征在于:所述悬挂组件包括固定在底盘上表面的竖板,在竖板顶端设有向转轮一侧延伸的顶板,所述减震机构的顶端连接在顶板的下表面,在竖板的中部开设有一段竖直延伸的滑槽。
3.根据权利要求2所述的一种防爆机器人的减震悬挂装置,其特征在于:所述减震机构包括在轴承外壁上向上延伸的连杆,在连杆顶端安装有对接板,在对接板的上表面安装有套管,在套管内插接有上下升降活动的伸缩杆,伸缩杆的顶端与顶板下表面固定连接;
4.根据权利要求3所述的一种防爆机器人的减震悬挂装置,其特征在于:所述减震调节件包括插接在滑槽内的下调节板和固定在竖板外壁上的上调节板,下调节板和上调节板向远离转轮的一侧延伸一段距离,在滑槽的内壁上开设有凹槽的限位槽,位于滑槽内部的下调节板外壁上安装有与限位槽相吻合的限位块。
5.根据权利要求4所述的一种防爆机器人的减震悬挂装置,其特征在于:在位于所述滑槽内部的下调节板端部安装有定位杆,定位杆的另一端与连杆外壁固定连接。
6.根据权利要求4所述的一种防爆机器人的减震悬挂装置,其特征在于:在下调节板端部的上表面安装有下铷磁铁,在上调节板端部的上表面安装有螺管,在螺管内插接有贯穿上调节板的螺杆,螺杆底端延伸至下铷磁铁的上方。
7.根据权利要求6所述的一种防爆机器人的减震悬挂装置,其特征在于:在所述螺杆顶端安装有旋钮,在螺杆底端安装有上铷磁铁,上铷磁铁与下铷磁铁的磁场方向相反。
技术总结
本技术公开了一种防爆机器人的减震悬挂装置,具体涉及防爆机器人技术领域,包括底盘,在底盘上开设有用于容纳转轮的通槽,在轮胎的转轴端部套设有轴承,在轴承上方连接有减震机构,在位于通槽边缘处的底盘上表面安装有悬挂组件,减震机构的顶端连接在悬挂组件上,在悬挂组件远离转轮的一侧安装有减震调节件。本技术可以根据防爆机器人工作场景和工作任务的不同,自由调节减震部分的弹力和相斥力,以改变产品的减震和缓冲性能,可适用于不同的工作环境,最大程度的降低环境对防爆机器人稳定行进的影响,降低故障率,提升使用寿命。
技术研发人员:窦少校,左兆陆
受保护的技术使用者:合肥市信同信息科技有限公司
技术研发日:20230510
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!