一种模块化轮式驱动装置以及包括该驱动装置的机器人的制作方法
本技术涉及轮式机器人的,尤其涉及一种模块化轮式驱动装置以及包括该模块化轮式驱动装置的机器人。
背景技术:
1、移动机器人是多学科和多领域的综合,广泛涉及人工智能、计算机视觉、自动控制、精密仪器、传感器、通讯、能源、材料、系统工程和信息等一系列学科,同时也是多领域的综合,包括高性能计算机,高速通讯网络,高性能电子器件,信号处理与模式识别、软件工程、控制的综合集成和系统优化。
2、移动机器人按移动载体来分,主要有轮式机器人和履带式机器人两种,其中,轮式机器人是最广泛的应用类型。轮式移动机器人面对各种复杂的环境和不同类型的负载进行移动,因此,针对不同任务参数,轮式机器人的驱动功率、减振系统参数等都是巨大的差异。但是现有的轮式机器人均是采用机器人主体和车轮整体配套设计安装,一套轮式机器人只能针对某一种参数设定的场合,针对不同类型的场合,需要再次研发或者购买不同的轮式机器人,造成了使用上的繁琐。
技术实现思路
1、有鉴于此,本实用新型的目的在于提供一种模块化的轮式驱动装置,以及安装该模块化轮式驱动装置的轮式机器人。
2、为了实现上述目的,本实用新型采取的技术方案为:
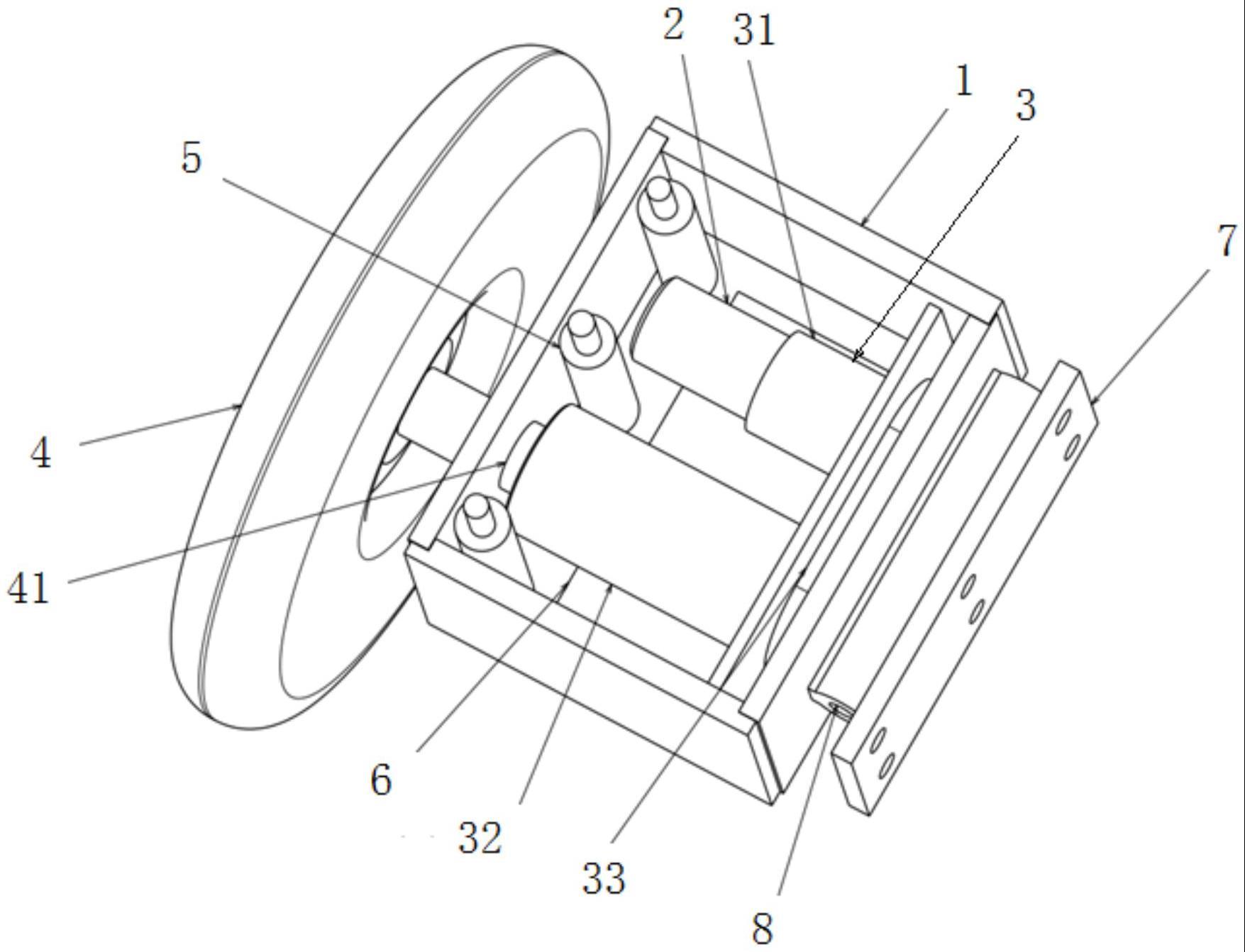
3、一种模块化轮式驱动装置,其中,包括:壳体;电机,所述电机设于所述壳体的内部;减速器,所述减速器设于所述壳体的内部,并且所述电机与所述减速器的输入端连接;车轮,所述车轮设于所述壳体的外部,所述车轮通过转轴与所述减速器的输出端连接,并且所述转轴贯穿所述壳体;若干弹簧,若干所述弹簧的一部分设于所述壳体的内部,若干所述弹簧的另一部分贯穿所述壳体;控制芯片,所述控制芯片设于所述壳体的内部,所述控制芯片与所述电机信号连接;固定板,所述固定板通过铰链设于所述壳体的外部。
4、上述的一种模块化轮式驱动装置,其中,所述减速器包括:一级减速器、二级减速器,所述一级减速器的输入端与所述电机连接,所述一级减速器的输出端与所述二级减速器的输入端连接,所述二级减速器的输出端与所述转轴连接。
5、上述的一种模块化轮式驱动装置,其中,所述一级减速器的输出端与所述二级减速器的输入端通过同步带连接。
6、上述的一种模块化轮式驱动装置,其中,所述转轴贯穿所述壳体的侧板。
7、上述的一种模块化轮式驱动装置,其中,所述弹簧为氮气弹簧,所述弹簧贯穿所述壳体的顶板。
8、上述的一种模块化轮式驱动装置,其中,所述控制芯片包括:控制模块、接收模块、发射模块,所述控制模块、所述接收模块、所述发射模块相互信号连接。
9、上述的一种模块化轮式驱动装置,其中,所述固定板开设若干安装孔。
10、上述的一种模块化轮式驱动装置,其中,所述铰链设于所述壳体的侧板。
11、一种安装模块化轮式驱动装置的机器人,其特征在于,包括:主体;至少两驱动装置,每一所述驱动装置为上述所述的一种模块化轮式驱动装置,所述驱动装置设于所述主体的下端。
12、上述的一种安装模块化轮式驱动装置的机器人,其中,所述主体包括:安装部、支撑部,所述固定板与所述安装部固定连接,若干所述弹簧可抵于所述支撑部。
13、本实用新型由于采用了上述技术,使之与现有技术相比具有的积极效果是:
14、(1)有效地将电机、减速器,弹簧、控制芯片、铰链集成在一个模块壳体中,只需要调整模块的驱动转速、减振参数等,即可以实现快速设计更换,以满足不同场合的需求。
15、(2)模块化的结构简单,设计成本低,有效地实现快速的加工和装配,与外置机器人主体的安装也方便。一旦某一个轮式驱动装置出现故障,只需更换故障模块即可。同时,可以根据不同场合的需求,可实现2×2、4×4、6×6、8×8等多种类型的车轮。
16、(3)通过弹簧的设计,有效地为机器人提供减震效果,同时,通过氮气压力的调整,实现可变弹性系数,无需更换弹簧就可以满足不同负载的运输任务。
17、(4)通过控制芯片的设计,可以控制电机的转速等参数,进而将轮式装置模块化地安装至机器人主体上。
18、(5)通过铰链的设计,使得机器人在行驶至不同地形时,车轮能够实现一轴或者多轴方向的摆动或者扭动。
技术特征:
1.一种模块化轮式驱动装置,其特征在于,包括:
2.根据权利要求1所述的模块化轮式驱动装置,其特征在于,所述减速器包括:一级减速器、二级减速器,所述一级减速器的输入端与所述电机连接,所述一级减速器的输出端与所述二级减速器的输入端连接,所述二级减速器的输出端与所述转轴连接。
3.根据权利要求2所述的模块化轮式驱动装置,其特征在于,所述一级减速器的输出端与所述二级减速器的输入端通过同步带连接。
4.根据权利要求1所述的模块化轮式驱动装置,其特征在于,所述转轴贯穿所述壳体的侧板。
5.根据权利要求1所述的模块化轮式驱动装置,其特征在于,所述弹簧为氮气弹簧,所述弹簧贯穿所述壳体的顶板。
6.根据权利要求1所述的模块化轮式驱动装置,其特征在于,所述控制芯片包括:控制模块、接收模块、发射模块,所述控制模块、所述接收模块、所述发射模块相互信号连接。
7.根据权利要求1所述的模块化轮式驱动装置,其特征在于,所述固定板开设若干安装孔。
8.根据权利要求1所述的模块化轮式驱动装置,其特征在于,所述铰链设于所述壳体的侧板。
9.一种安装模块化轮式驱动装置的机器人,其特征在于,包括:
10.根据权利要求9所述的安装模块化轮式驱动装置的机器人,其特征在于,所述主体包括:安装部、支撑部,所述固定板与所述安装部固定连接,若干所述弹簧可抵于所述支撑部。
技术总结
本技术公开一种模块化轮式驱动装置以及包括该驱动装置的机器人,至少两驱动装置,驱动装置设于主体的下端。驱动装置的电机设于壳体的内部;减速器设于壳体的内部,并且电机与减速器的输入端连接;车轮设于壳体的外部,车轮通过转轴与减速器的输出端连接,并且转轴贯穿壳体;若干弹簧的一部分设于壳体的内部,若干弹簧的另一部分贯穿壳体;控制芯片设于壳体的内部,控制芯片与电机信号连接;固定板通过铰链设于壳体的外部。使用本技术,有效地将电机、减速器,弹簧、控制芯片、铰链集成在一个模块壳体中,只需要调整模块的驱动转速、减振参数等,即可以实现快速设计更换,以满足不同场合的需求。
技术研发人员:钱炳锋
受保护的技术使用者:苏州苏荷新雨科技有限公司
技术研发日:20230510
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!