一种差速转向无人车的制作方法
本技术涉及小型无人车结构,具体涉及一种差速转向无人车。
背景技术:
1、无人驾驶汽车是指依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。
2、目前常见的小型无人车中,在车轮设计中应用了麦克纳姆轮结构,这种结构机动性很强,但是通过性较弱。而履带结构震动较大,速度也相对慢些。还有的应用了悬挂系统,但悬挂结构过于简单,在实际使用中不能起到减震并增强通过性的作用。
3、因此,急需一种震动小且通过性强的差速转向无人车。
技术实现思路
1、为了提供一种震动小且通过性强的差速转向无人车,本实用新型采用了如下技术方案:
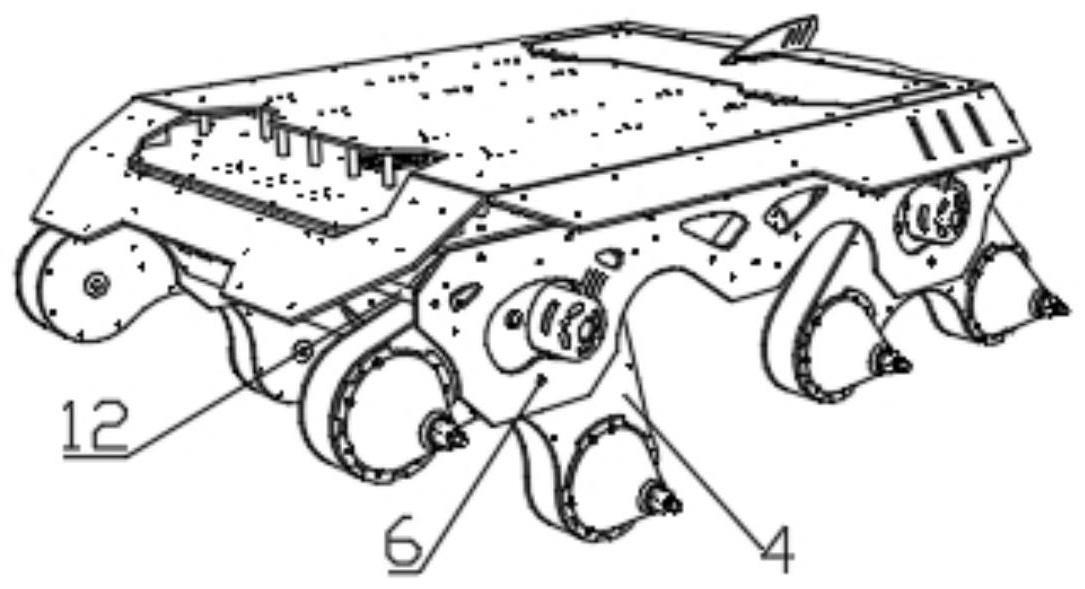
2、一种差速转向无人车,包括车身、多个车轮和底盘,还包括:
3、2个限位组件,对称设置在所述车身的两侧;
4、多个中间凸出的弧形悬挂机构;多个所述弧形悬挂机构间隔设置在所述限位组件上,并通过第三转轴与所述限位组件转动连接;
5、垂直所述弧形悬挂机构设置的限滑机构,所述限滑机构平行设置在所述第三转轴的上方,用于限制所述悬挂机构的轴向滑动;
6、其中,所述悬挂机构的弧形两端对称设置有2个所述车轮,所述悬挂机构靠近2个所述车轮的一侧设置有驱动部,用于驱动所述悬挂机构带动所述车轮转动。
7、进一步地,所述弧形悬挂机构为2个,并对称设置在所述限位组件上。
8、进一步地,每个所述限位组件均包括对称设置的2个支架,2个所述支架之间平行设置有第一支杆和第二支杆,所述第一支杆的两端和所述第二支杆的两端均与2个所述支架固定连接;所述支架上设有与所述第三转轴转动连接的开孔。
9、进一步地,所述悬挂机构设置于所述第一支杆和所述第二支杆之间,并分别与所述第一支杆和所述第二支杆预设有间隙,以使所述悬挂机构相对所述车身按照预设轨迹在所述第一支杆与所述第二支杆之间摆动。
10、进一步地,所述悬挂机构包括电机齿轮、第一减速齿轮、第二减速齿轮、第一转轴、第二转轴、第一皮带轮、第二皮带轮、第三皮带轮、第四皮带轮、第一皮带、第二皮带、第一皮带压轮和第二皮带压轮;
11、其中,所述驱动部为电机,所述电机齿轮固定安装在所述电机的驱动端;
12、所述第一转轴和所述第二转轴对称设置在所述电机齿轮的两侧,并分别与所述悬挂机构转动连接;所述第一减速齿轮和所述第二减速齿轮分别固定套设在所述第一转轴和所述第二转轴上,且均与所述电机齿轮啮合;
13、所述第一皮带轮固定套设在所述第一转轴上,并位于所述第一减速齿轮远离所述车身的一侧;所述第二皮带轮远离所述车身的一侧与所述车轮转动连接,并设置于所述悬挂机构靠近所述第一皮带轮的一端,所述第一皮带套设在所述第一皮带轮和所述第二皮带轮外侧;
14、所述第一皮带压轮位于所述第一皮带悬空段的下方,且与所述第一皮带外侧相贴合;
15、所述第三皮带轮固定套设在所述第二转轴上,并位于所述第二减速齿轮远离所述车身的一侧;所述第四皮带轮与所述第二皮带轮对称设置;所述第四皮带轮远离所述车身的一侧与所述车轮转动连接;所述第二皮带套设在所述第三皮带轮和所述第四皮带轮外侧;
16、所述第二皮带压轮位于所述第二皮带悬空段的下方,且与所述第二皮带外侧相贴和。
17、进一步地,所述限滑机构位于所述悬挂机构远离所述车轮的一侧,所述限滑机构包括依次固定套设在所述第一转轴上的第一轴连接座、第一齿座、限位弹簧和限位螺母。
18、进一步地,所述车身内设置有电池仓,所述电池仓的内部相对的两侧面上阵列设置有若干进气口;
19、所述电池仓具有仓盖,所述仓盖通过铰链与所述车身铰接;
20、所述仓盖的上表面设置有弹簧扣;
21、所述仓盖的下表面设置有第一磁吸,所述电池仓的仓体上对应设置有第二磁吸。
22、进一步地,所述车身内靠近所述电池仓的一侧依次设置有电子调速器、图传模块和接收机,所述车身内远离所述电池仓的一侧设置有散热风扇。
23、进一步地,所述车身远离所述电池仓的一端设置有摄像头。
24、进一步地,所述车身上部设置有承载板。
25、本实用新型具有如下有益效果:
26、本实用新型通过设置悬挂机构,使车轮更加贴合不同地形的地面,降低了整个车身为适应越野路面时的起伏幅度,也降低了车身的震动;同时较大的底盘离地高度使得更加容易通过障碍物,增强了通过性。
技术特征:
1.一种差速转向无人车,包括车身、多个车轮和底盘,其特征在于,还包括:
2.根据权利要求1所述的一种差速转向无人车,其特征在于,所述弧形悬挂机构为2个,并对称设置在所述限位组件上。
3.根据权利要求2所述的一种差速转向无人车,其特征在于,每个所述限位组件均包括对称设置的2个支架,2个所述支架之间平行设置有第一支杆和第二支杆,所述第一支杆的两端和所述第二支杆的两端均与2个所述支架固定连接;所述支架上设有与所述第三转轴转动连接的开孔。
4.根据权利要求3所述的一种差速转向无人车,其特征在于,所述悬挂机构设置于所述第一支杆和所述第二支杆之间,并分别与所述第一支杆和所述第二支杆预设有间隙,以使所述悬挂机构相对所述车身按照预设轨迹在所述第一支杆与所述第二支杆之间摆动。
5.根据权利要求1所述的一种差速转向无人车,其特征在于,所述悬挂机构包括电机齿轮、第一减速齿轮、第二减速齿轮、第一转轴、第二转轴、第一皮带轮、第二皮带轮、第三皮带轮、第四皮带轮、第一皮带、第二皮带、第一皮带压轮和第二皮带压轮;
6.根据权利要求5所述的一种差速转向无人车,其特征在于,所述限滑机构位于所述悬挂机构远离所述车轮的一侧,所述限滑机构包括依次固定套设在所述第一转轴上的第一轴连接座、第一齿座、限位弹簧和限位螺母。
7.根据权利要求1所述的一种差速转向无人车,其特征在于,所述车身内设置有电池仓,所述电池仓的内部相对的两侧面上阵列设置有若干进气口;
8.根据权利要求7所述的一种差速转向无人车,其特征在于,所述车身内靠近所述电池仓的一侧依次设置有电子调速器、图传模块和接收机,所述车身内远离所述电池仓的一侧设置有散热风扇。
9.根据权利要求7所述的一种差速转向无人车,其特征在于,所述车身远离所述电池仓的一端设置有摄像头。
10.根据权利要求1所述的一种差速转向无人车,其特征在于,所述车身上部设置有承载板。
技术总结
本技术公开了一种差速转向无人车,属于小型无人车结构技术领域;其包括:车身、多个车轮和底盘;2个限位组件,对称设置在车身的两侧;多个中间凸出的弧形悬挂机构;多个弧形悬挂机构间隔设置在限位组件上,并通过第三转轴与限位组件转动连接;垂直弧形悬挂机构设置的限滑机构,限滑机构平行设置在第三转轴的上方;悬挂机构的弧形两端对称设置有2个车轮,悬挂机构靠近2个车轮的一侧设置有驱动部。本技术通过设置悬挂机构,使车轮更加贴合不同地形的地面,降低了整个车身为适应越野路面时的起伏幅度,也降低了车身的震动;同时较大的底盘离地高度使得更加容易通过障碍物,增强了通过性。
技术研发人员:瞿光仁
受保护的技术使用者:福建福亚国荣电子科技有限公司
技术研发日:20230512
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!