一种可扩展式重构轮的制作方法
本技术属于机器人,特别涉及一种可扩展式重构轮。
背景技术:
1、当下地震、海啸等自然灾害时有发生,危险药品泄露、火灾、恐怖袭击等突发事故也屡见报端,由于二次灾害的不可预测性、搜救环境的复杂性、人力资源的局限性等因素,往往会阻碍搜救行动的快速展开,甚至对搜救人员的人身安全产生严重威胁。为此国内外众多科研人员针对灾害、突发事件中的快速搜寻问题展开了大量的理论与实践研究,其中搜救机器人的研发则是现在的研究热点之一。
2、近年来搜救机器人的发展迅速,在灾害救援等方面已经有着广泛地应用。在进行伤员搜寻任务时,工作区域的地形环境通常比较复杂,因此搜救机器人运动机构的选择对其整体性能指标有很大影响,履带式、轮式、弧腿式等是较为常用的类型,每种方式各有优缺点:采用轮式结构运动能量损耗小、机动性高、运动平稳但其越障性能差;采用类弧腿式结构使搜救机器人更好地适应非结构化环境但会使其运动平稳性下降,采用履带式结构的优点是与地面接触面积大使搜救机器人承载能力增强,缺点是运动能力差。如今搜救机器人发展已经到达瓶颈阶段,面对复杂的地形条件传统的轮式、腿式、履带式等类型的搜救机器人已经难以符合当今搜救任务对机器人运动能力的要求,因此针对地形适应性更好的搜救机器人运动结构的研究是搜救机器人一个重要的研究分支。
3、针对目前存在的问题,国内外的众多科研人员投入到搜救机器人运动结构的研究当中。王雁东,戴建生等基于平行四边形机构设计了一种新型连杆铰接轮腿式机器人,根据机器人的特点设计三种步态,并通过理论计算与仿真分析证明了三种步态的可行性与有效性;天津大学田润等人经过若干种多轮辐机器人的越障能力对比,优选出一种三轮幅类弧腿结构,进而以此设计出一种新型轮腿式机器人,虽然所设计的三幅腿结构运动的质心波动较大但可以通过后期的步态规划大幅减小,并以攀爬楼梯为越障目标,通过几何学方法设计出高效的越障方案,并以此为作为轮腿参数化设计的理论支撑;guifangqiao,yingzhang等人设计一种具有腰部关节腿式机器人,并通过仿真分析与实物测试,验证了所添加设计的腰部关节能够极大地提升机器人整体运动性能和环境适应能力。
4、基于搜救环境的复杂性,越障能力与机动性是搜救机器人两项重要的运动性能指标。目前常见轮式、腿式等搜救机器人优缺点明显,大多数产品不能在满足机动性的前提下很好地兼顾越障能力,或者反之。
技术实现思路
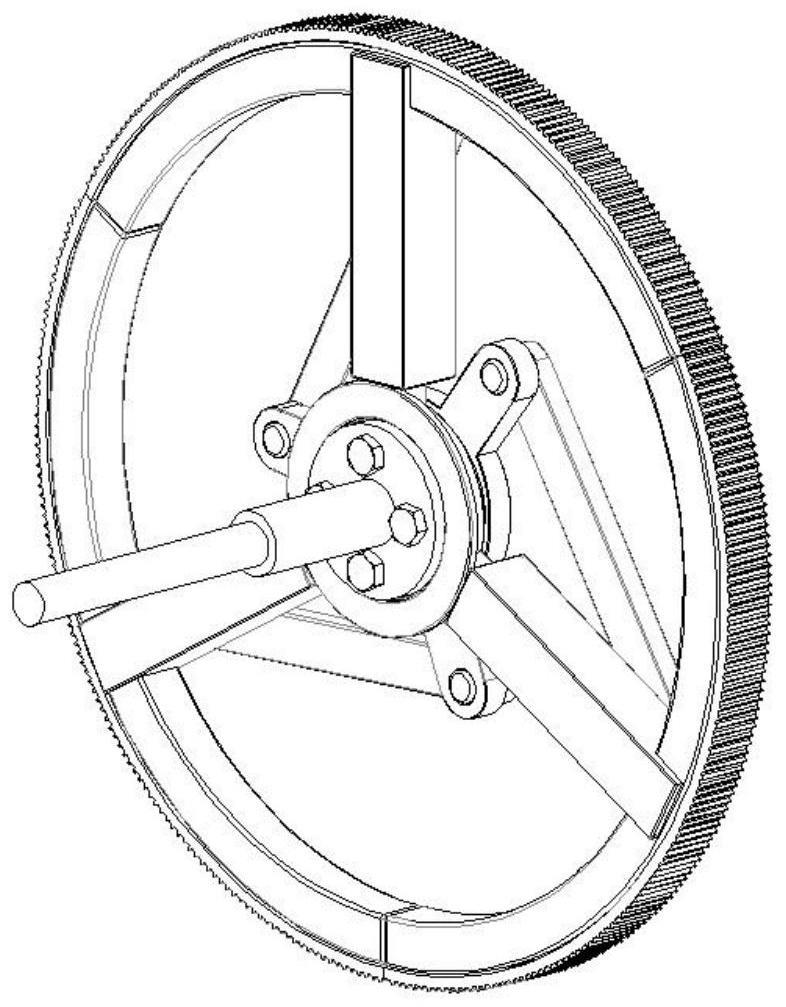
1、本实用新型在空间折叠变质机理地启发下,提出了一种可扩展式重构轮,可以应用于搜救机器人,其兼具轮式机器人的机动性与类弧腿式机器人的越障能力,打破目前搜救机器人的技术瓶颈。所述可扩展式重构轮包括:转动三爪盘、连杆、相对固定三叉架、传动轴、轴套筒和轮体;
2、所述传动轴第一端用于接收外部动力,所述传动轴能够接收动力后旋转;
3、所述轴套筒套在所述传动轴外侧,所述轴套筒能够围绕所述传动轴旋转;
4、所述相对固定三叉架中心部位设置有三叉架通孔,所述传动轴穿过所述三叉架通孔,所述轴套筒与相对固定三叉架固定连接;
5、所述相对固定三叉架外侧设有三个支架;
6、所述转动三爪盘中心部位设置有三爪盘通孔,所述转动三爪盘通过三爪盘通孔与所述传动轴第二端固定连接;
7、所述转动三爪盘外侧设有三个支爪;
8、所述连杆有三个,三个所述连杆第一端与所述三个支爪轴连接;
9、所述轮体有三个,所述轮体包括支撑轨和轮外辕,所述支撑轨第一端与所述轮外辕第一侧面固定连接;
10、所述支撑轨第二端内部设置有支撑轨凹槽,相对固定三叉架三个支架与三个所述支撑轨凹槽配合安装,三个所述支架能够分别沿三个所述支撑轨凹槽滑动;
11、三个所述连杆第二端与三个所述支撑轨第二侧面分别连接;
12、当三个所述支架在三个所述凹槽中距离最长时,三个所述轮体合拢,所述可扩展式重构轮为轮式结构;
13、当三个所述支架在三个所述凹槽中距离最短时,所述转动三爪盘三个支爪、三个所述连杆和三个所述支撑轨分别处于同一直线,三个所述轮体分开且之间距离最长,所述可扩展式重构轮为类弧腿式结构;
14、当三个所述支架在三个所述凹槽中距离处于最长最短之间时,所述转动三爪盘三个支爪、三个所述连杆和三个所述支撑轨不处于同一直线,三个所述轮体分开且之间距离小于最长距离,所述可扩展式重构轮为中间态结构。
15、进一步地,所述三叉架通孔四周设置有若干第一螺丝孔,所述轴套筒外侧配合设有第二螺丝孔,所述轴套筒使用第一螺栓通过所述第一螺丝孔与第二螺丝孔所述相对固定三叉架固定连接。
16、进一步地,三个所述支撑轨第二侧面分别设置第三螺丝孔,三个所述连杆第二端分别设置有连杆通孔,三个所述支撑轨与三个所述连杆分别使用第二螺栓通过第三螺丝孔和连杆通孔进行轴连接。
17、进一步地,所述可扩展式重构轮还包括三个圆柱环;
18、三个所述支撑轨与三个所述连杆分别使用第二螺栓通过第三螺丝孔、圆柱环和连杆通孔进行轴连接。
19、进一步地,三个所述轮外辕第三侧面分别设置有橡胶胎,所述橡胶胎用于增大摩擦力和减振。
20、进一步地,所述相对固定三叉架一侧靠三叉架通孔部位设置有三个限位块,
21、所述转动三爪盘一侧靠三爪盘通孔部位设置有三个限位凹槽;
22、三个所述限位块与三个所述限位凹槽匹配连接;
23、当重构轮组装好后,所述三个所述限位块分别在三个所述限位凹槽内滑动。
24、进一步地,所述限位凹槽设置有限位角度;
25、当限位块处于第一限位角度时,所述可扩展式重构轮为轮式结构;
26、当限位块处于第二限位角度时,所述可扩展式重构轮为类弧腿式结构;
27、当限位块处于第一限位角度与第二限位角度之间时,所述可扩展式重构轮为中间态结构。
28、进一步地,所述三爪盘通孔为不规则圆孔,所述传动轴第二端设置有不规则圆柱端,所述不规则圆柱端能够配合插入到所述不规则圆孔内。
29、进一步地,所述传动轴与所述转动三爪盘通过第三螺栓连接。
30、进一步地,所述轴套筒第一端与所述传动轴第一端处于同一方向,
31、所述轴套筒第一端用于接收外部动力,所述轴套筒能够固定/旋转。
32、本实用新型设计的一种可扩展式重构轮,其机构简单、易维护、易拆卸,具有轮式、类弧腿式及中间态等状态,根据不同的地形特点重构轮可主动切换不同的模式,以适应不同地形环境。
技术特征:
1.一种可扩展式重构轮,其特征在于,所述可扩展式重构轮包括转动三爪盘(1)、连杆(2)、相对固定三叉架(3)、传动轴(4)、轴套筒(5)和轮体(6);
2.根据权利要求1所述的可扩展式重构轮,其特征在于,
3.根据权利要求1所述的可扩展式重构轮,其特征在于,
4.根据权利要求3所述的可扩展式重构轮,其特征在于,
5.根据权利要求1所述的可扩展式重构轮,其特征在于,
6.根据权利要求1所述的可扩展式重构轮,其特征在于,
7.根据权利要求6所述的可扩展式重构轮,其特征在于,
8.根据权利要求1所述的可扩展式重构轮,其特征在于,
9.根据权利要求1或8所述的可扩展式重构轮,其特征在于,
10.根据权利要求1所述的可扩展式重构轮,其特征在于,
技术总结
本技术公开了一种可扩展式重构轮,包括转动三爪盘、连杆、相对固定三叉架、传动轴、轴套筒和轮体;轴套筒套在传动轴外侧,相对固定三叉架中心部位设置有三叉架通孔,传动轴穿过三叉架通孔,轴套筒与相对固定三叉架固定连接;相对固定三叉架外侧设有三个支架;转动三爪盘中心部位设置有三爪盘通孔,转动三爪盘通过三爪盘通孔与传动轴第二端固定连接;转动三爪盘外侧设有三个支爪;连杆有三个,三个连杆与三个支爪轴连接;轮体有三个,轮体与轮外辕固定连接;三个连杆与三个支撑轨分别连接;本技术机构简单、易维护、易拆卸,具有轮式、类弧腿式及中间态等状态,根据不同的地形特点重构轮可主动切换不同的模式,以适应不同地形环境。
技术研发人员:苏卫华
受保护的技术使用者:国科卫华(天津)智能科技有限公司
技术研发日:20230526
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!