一种具有空间拓展功能的AGV机器人的制作方法
本技术涉及agv机器人,具体为一种具有空间拓展功能的agv机器人。
背景技术:
1、agv搬运机器人或agv小车的主要功用集中在自动物流搬转运,agv搬运机器人是通过特殊地标导航自动将物品运输至指定地点,最常见的引导方式为磁条引导,激光引导,磁钉导航和惯性导航。
2、例如中国实用新型专利公开号cn217805029u:公开了一种全自动卷料搬运agv机器人,涉及搬运机器人技术领域,包括agv搬运机器人,所述agv搬运机器人的底部设置有agv导航机构,所述agv搬运机器人的顶部设置有装料箱,所述装料箱的侧面安装有侧板,所述agv搬运机器人的两端设置有侧挡机构。本实用新型通过设置有侧挡机构,通过将侧挡机构安装在agv搬运机器人的两端,在侧挡机构的内侧通过分布有电动升降柱与agv搬运机器人的两端底部连接,在侧挡机构的侧面还设置有柔性条,在侧挡机构的顶部则设置有加高板,从而方便了在将卷料放入搬运设备上时,通过电动升降柱的电动伸缩,进而使得侧挡机构上升,挡在装料箱的一端,对装料箱内部的卷料进行阻挡,提升了搬运的稳定。
3、上述全自动卷料搬运agv机器人在使用时,能提高搬运物料时的稳定性,但其在使用时仍存在一些不足,例如该机器人在增加运输容量时,只能增加两侧挡板的高度,其他两侧的高度无法增加,当该机器人在运输大量物料时,则会出现物料掉落的情况,从而使机器人的使用效果降低。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种具有空间拓展功能的agv机器人,具备空间拓展等优点,解决了机器人运输大量物料时稳定性差的问题。
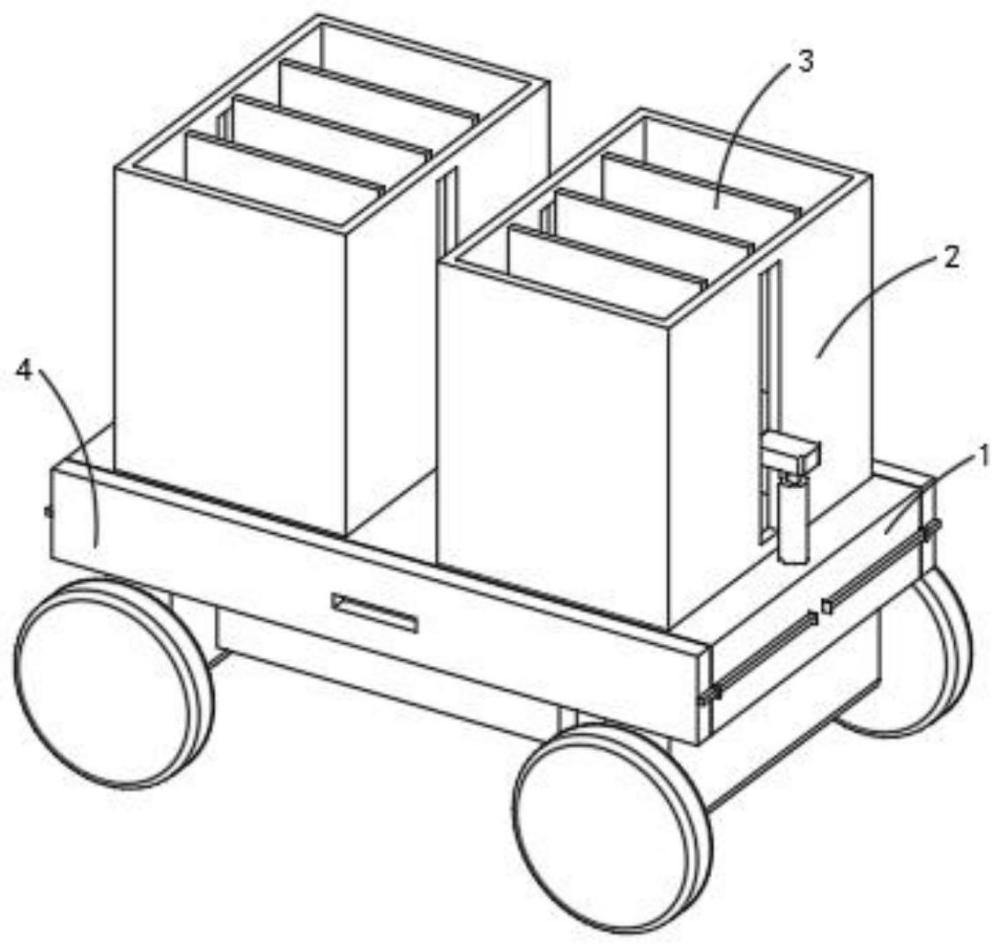
2、为实现上述目的,本实用新型提供如下技术方案:一种具有空间拓展功能的agv机器人,包括本体,所述本体的上表面固定有壳体,所述壳体上设有收纳机构,所述本体上设有拓展机构;
3、所述收纳机构包括固定在壳体内底壁不少于两个的隔板,所述壳体的内部滑动连接有移动板,所述壳体的左右两侧均开设有通孔,所述移动板的左右两侧均固定有连接板,两个所述移动板相背的一侧均贯穿并延伸至通孔的外侧,所述本体的上表面固定有气缸,所述连接板固定在气缸输出轴的外侧,所述连接板的内部开设有不少于两个的滑孔,所述隔板滑动连接在滑孔的内部。
4、进一步,所述拓展机构包括开设在本体正面和背面的凹槽,两个所述凹槽相背的一侧壁均固定有弹簧,两个所述弹簧相背的一侧均固定有盒体,所述盒体滑动连接在凹槽的内部,两个所述盒体相背的一侧均固定有挡板,两个所述挡板相对的一侧分别抵接在本体的正面和背面,所述本体的左右两侧均固定有两个定位架,所述挡板的左右两侧均固定有定位块,所述定位块滑动连接在定位架的内部。
5、进一步,所述隔板与滑孔间隙配合,所述隔板的高度与壳体内腔的高度相等。
6、进一步,所述移动板在壳体内做上下线性移动,所述隔板的宽度小于壳体内腔的宽度。
7、进一步,所述移动板的长度和宽度分别与壳体内腔的长度和宽度相适配,不少于两个所述隔板呈线性等距分布在壳体内。
8、进一步,所述定位架横截面的形状为u形,所述定位块在定位架内做前后线性移动。
9、进一步,所述盒体的长度与凹槽内腔的长度相适配,所述盒体的形状为内部中空且顶面缺失的长方体。
10、进一步,两个所述凹槽呈对称分布于本体中轴线的前后两侧,四个所述定位架呈矩形分布在本体上。
11、与现有技术相比,本申请的技术方案具备以下有益效果:
12、1、该具有空间拓展功能的agv机器人,设置有收纳机构,经收纳机构各个结构之间相互配合,能方便提高壳体的储存空间,通过气缸的运行,能使移动板在壳体内移动,在移动板移动后,则能增加壳体的储存空间,使壳体能存在更多物料,使机器人运输大量物料时也能更加稳定。
13、2、该具有空间拓展功能的agv机器人,设置有拓展机构,经拓展机构各个结构之间相互配合,能方便增加机器人的储存空间,通过移动的盒体,能使物料放置在凹槽内,以增加机器人的存储空间,使机器人在工作时能运输更多物料。
技术特征:
1.一种具有空间拓展功能的agv机器人,包括本体(1),其特征在于:所述本体(1)的上表面固定有壳体(2),所述壳体(2)上设有收纳机构(3),所述本体(1)上设有拓展机构(4);
2.根据权利要求1所述的一种具有空间拓展功能的agv机器人,其特征在于:所述拓展机构(4)包括开设在本体(1)正面和背面的凹槽(402),两个所述凹槽(402)相背的一侧壁均固定有弹簧(401),两个所述弹簧(401)相背的一侧均固定有盒体(403),所述盒体(403)滑动连接在凹槽(402)的内部,两个所述盒体(403)相背的一侧均固定有挡板(404),两个所述挡板(404)相对的一侧分别抵接在本体(1)的正面和背面,所述本体(1)的左右两侧均固定有两个定位架(405),所述挡板(404)的左右两侧均固定有定位块(406),所述定位块(406)滑动连接在定位架(405)的内部。
3.根据权利要求1所述的一种具有空间拓展功能的agv机器人,其特征在于:所述隔板(301)与滑孔(303)间隙配合,所述隔板(301)的高度与壳体(2)内腔的高度相等。
4.根据权利要求1所述的一种具有空间拓展功能的agv机器人,其特征在于:所述移动板(302)在壳体(2)内做上下线性移动,所述隔板(301)的宽度小于壳体(2)内腔的宽度。
5.根据权利要求1所述的一种具有空间拓展功能的agv机器人,其特征在于:所述移动板(302)的长度和宽度分别与壳体(2)内腔的长度和宽度相适配,不少于两个所述隔板(301)呈线性等距分布在壳体(2)内。
6.根据权利要求2所述的一种具有空间拓展功能的agv机器人,其特征在于:所述定位架(405)横截面的形状为u形,所述定位块(406)在定位架(405)内做前后线性移动。
7.根据权利要求2所述的一种具有空间拓展功能的agv机器人,其特征在于:所述盒体(403)的长度与凹槽(402)内腔的长度相适配,所述盒体(403)的形状为内部中空且顶面缺失的长方体。
8.根据权利要求2所述的一种具有空间拓展功能的agv机器人,其特征在于:两个所述凹槽(402)呈对称分布于本体(1)中轴线的前后两侧,四个所述定位架(405)呈矩形分布在本体(1)上。
技术总结
本技术涉及一种具有空间拓展功能的AGV机器人,包括本体,所述本体的上表面固定有壳体,所述壳体上设有收纳机构,所述本体上设有拓展机构,所述收纳机构包括固定在壳体内底壁不少于两个的隔板。该具有空间拓展功能的AGV机器人,设置有收纳机构和拓展机构,经收纳机构和拓展机构各个结构之间相互配合,能方便提高壳体的储存空间,通过气缸的运行,能使移动板在壳体内移动,在移动板移动后,则能增加壳体的储存空间,使壳体能存在更多物料,使机器人运输大量物料时也能更加稳定,同时还能方便增加机器人的储存空间,通过移动的盒体,能使物料放置在凹槽内,以增加机器人的存储空间,使机器人在工作时能运输更多物料。
技术研发人员:李德辉
受保护的技术使用者:欧里湾(厦门)科技有限公司
技术研发日:20230619
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!