一种适应多种地形的工业机器人行走机构的制作方法
本技术涉及工业机器人领域,具体为一种适应多种地形的工业机器人行走机构。
背景技术:
1、搬运工业机器人是可以进行自动化搬运作业的工业机器人,运机器人可安装不同的末端执行器以完成各种不同形状和状态的工件搬运工作,大大减轻了人类繁重的体力劳动。世界上使用的搬运机器人逾10万台,被广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛搬运、集装箱等的自动搬运。部分发达国家已制定出人工搬运的最大限度,超过限度的必须由搬运机器人来完成。
2、然而现有搬运工业机器人的,在厂房、仓库等使用场景中都有台阶的出现,这时搬运工业机器人就无法有效地进行运输作业,因此在对搬运工业机器人进行设计时,就需要考虑通过应多种地形的工业机器人行走机构解决该问题,已达到更好的适用效果。
技术实现思路
1、基于此,本实用新型的目的是提供一种适应多种地形的工业机器人行走机构,以解决搬运工业机器人可以跨越台阶的技术问题。
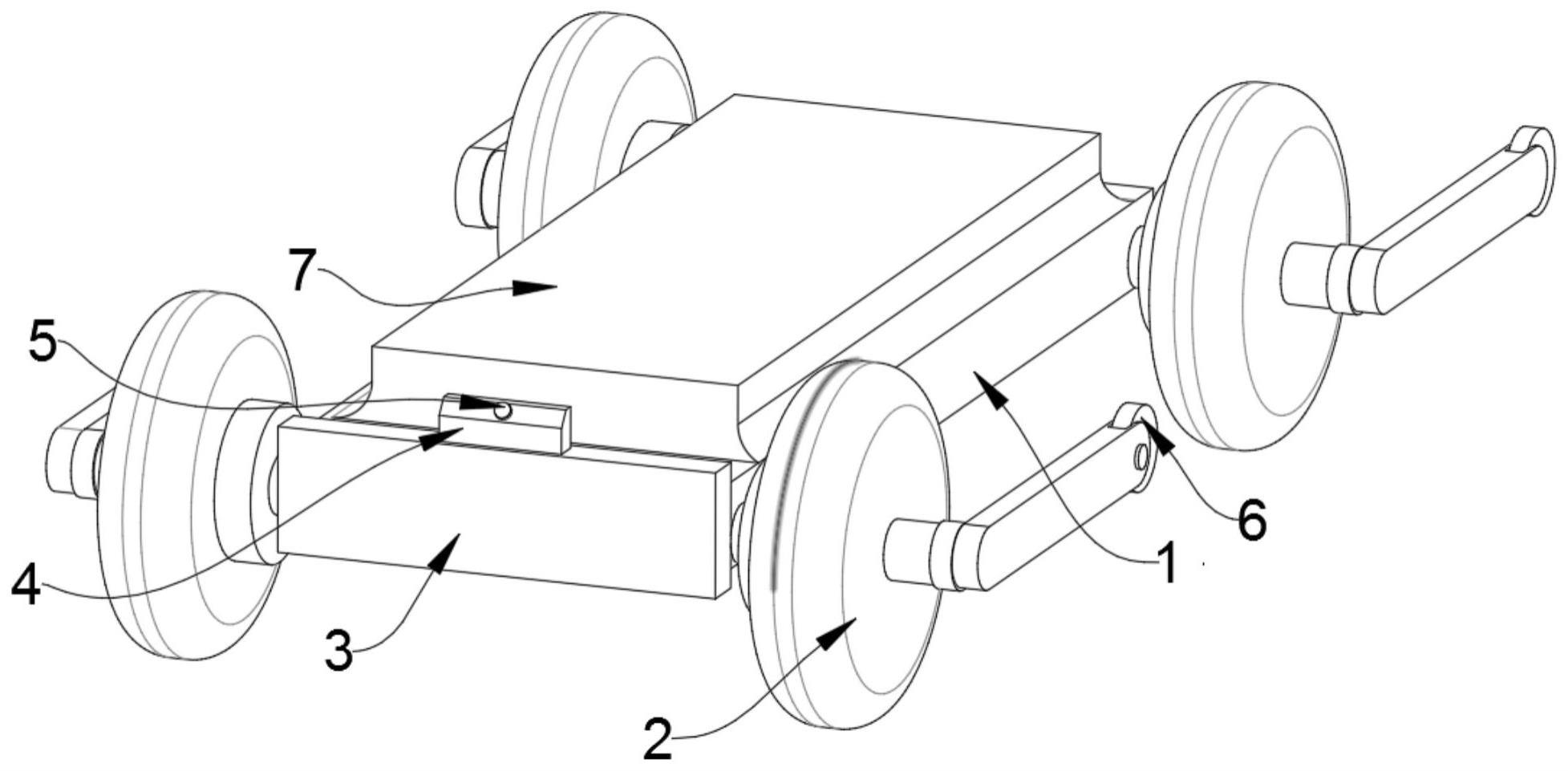
2、为实现上述目的,本实用新型提供如下技术方案:一种适应多种地形的工业机器人行走机构,包括底座、行走轮,所述底座的内部设置有安装槽,所述安装槽的内部设置有卡合机构和信号接收器,所述卡合机构包括电推杆,所述电推杆设置有两个,两个所述电推杆的输出端均设置有活动杆,两个所述活动杆的两端均抵触有两个卡合杆。
3、通过采用上述技术方案,由于底座的内部设置有安装槽,因此通过安装槽可以有效地安装卡和机构。
4、进一步的,所述行走轮的一侧设置有撑杆,所述两个卡合杆贯穿底座的内壁,并延伸至撑杆的内部,所述撑杆的内部下方设置有回弹机构,所述回弹机构包括卡合孔,所述卡合孔的内部下方设置有弹簧,所述弹簧的上方抵触有压块,所述卡合杆与压块相抵触。
5、通过采用上述技术方案,由于行走轮的一侧设置有撑杆,所述两个卡合杆贯穿底座的内壁,并延伸至撑杆的内部,因此通过撑杆可以有效地将底座支撑起来。
6、进一步的,所述底座的外表面设置有前挡板,所述前挡板的顶部设置有安装块,所述安装块的一侧设置有障碍物检测传感器。
7、通过采用上述技术方案,由于底座的外表面设置有前挡板,所述前挡板的顶部设置有安装块,通过前挡板在底座的前方受到撞击时可以起到一定防护的效果。
8、进一步的,所述底座的顶部设置有安装座,所述行走轮设置有四个,且四个行走轮呈矩形排列设置于底座的四角。
9、通过采用上述技术方案,由于底座的顶部设置有安装座,通过安装座可以有效地安装运输机器人。
10、进一步的,所述撑杆设置有四个,四个所述撑杆的一端均设置有支撑轮。
11、通过采用上述技术方案,由于撑杆设置有四个,通过四个撑杆可以稳定地将底座支撑起来。
12、进一步的,所述卡合杆与卡合孔相卡合,所述压块与卡合孔卡合滑移。
13、通过采用上述技术方案,由于卡合杆与卡合孔相卡合,因此当卡合杆与卡合孔卡合后撑杆就可以跟着行走轮进行转动。
14、进一步的,所述底座、前挡板、安装块均采用不锈钢材质构成,所述行走轮、支撑轮均采用橡胶材质构成。
15、通过采用上述技术方案,由于底座、前挡板、安装块均采用不锈钢材质构成,因此底座、前挡板、安装块的硬度较高,同时具有抗氧化的特效,从而可以大大延长使用寿命。
16、综上所述,本实用新型主要具有以下有益效果:
17、1、本实用新型通过设置卡合机构、障碍物检测传感器、信号接收器,当搬运工业机器人遇见台阶时,障碍物检测传感器会发送电讯号给信号接收器,随后控制安装槽内部的电机,将活动杆推出,随后活动杆会与卡合杆相抵触,并将活动杆两侧的卡合杆顶入卡合孔内部,之后行走轮在转动时,就会带动撑杆转动,并通过撑杆支撑轮将搬运工业机器人支撑起来,已达到跨越台阶的目的,从而可以起到多种地形的目的;
18、2、本实用新型通过设置回弹机构,当工业机器人上完台阶后,撑杆会继续转动并复位,随后电推杆会停止,之后卡合孔内部的弹簧,可以有效地将卡合杆回弹并复位,一起到快速将撑杆复位的目的,避免撑杆妨碍行走轮行走的情况发生。
技术特征:
1.一种适应多种地形的工业机器人行走机构,包括底座(1)、行走轮(2),其特征在于:所述底座(1)的内部设置有安装槽(10),所述安装槽(10)的内部设置有卡合机构(8)和信号接收器(11),所述卡合机构(8)包括电推杆(801),所述电推杆(801)设置有两个,两个所述电推杆(801)的输出端均设置有活动杆(802),两个所述活动杆(802)的两端均抵触有两个卡合杆(803)。
2.根据权利要求1所述的适应多种地形的工业机器人行走机构,其特征在于:所述行走轮(2)的一侧设置有撑杆(12),所述两个卡合杆(803)贯穿底座(1)的内壁,并延伸至撑杆(12)的内部,所述撑杆(12)的内部下方设置有回弹机构(9),所述回弹机构(9)包括卡合孔(902),所述卡合孔(902)的内部下方设置有弹簧(901),所述弹簧(901)的上方抵触有压块(903),所述卡合杆(803)与压块(903)相抵触。
3.根据权利要求1所述的适应多种地形的工业机器人行走机构,其特征在于:所述底座(1)的外表面设置有前挡板(3),所述前挡板(3)的顶部设置有安装块(4),所述安装块(4)的一侧设置有障碍物检测传感器(5)。
4.根据权利要求1所述的适应多种地形的工业机器人行走机构,其特征在于:所述底座(1)的顶部设置有安装座(7),所述行走轮(2)设置有四个,且四个行走轮(2)呈矩形排列设置于底座(1)的四角。
5.根据权利要求2所述的适应多种地形的工业机器人行走机构,其特征在于:所述撑杆(12)设置有四个,四个所述撑杆(12)的一端均设置有支撑轮(6)。
6.根据权利要求2所述的适应多种地形的工业机器人行走机构,其特征在于:所述卡合杆(803)与卡合孔(902)相卡合,所述压块(903)与卡合孔(902)卡合滑移。
7.根据权利要求1所述的适应多种地形的工业机器人行走机构,其特征在于:所述底座(1)、前挡板(3)、安装块(4)均采用不锈钢材质构成,
技术总结
本技术公开了一种适应多种地形的工业机器人行走机构,涉及工业机器人领域。本技术包括底座、行走轮,所述底座的内部设置有安装槽,所述安装槽的内部设置有卡合机构和信号接收器,所述卡合机构包括电推杆,本技术通过设置卡合机构、障碍物检测传感器、信号接收器,当搬运工业机器人遇见台阶时,障碍物检测传感器会发送电讯号给信号接收器,随后控制安装槽内部的电机,将活动杆推出,随后活动杆会与卡合杆相抵触,并将活动杆两侧的卡合杆顶入卡合孔内部,之后行走轮在转动时,就会带动撑杆转动,并通过撑杆支撑轮将搬运工业机器人支撑起来,已达到跨越台阶的目的,从而可以起到多种地形的目的。
技术研发人员:胡月,王在国,雷琳佳,罗大伟
受保护的技术使用者:重庆西门雷森实业发展有限公司
技术研发日:20230712
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!