一种雷达保护装置及无人车的制作方法
本技术涉及无人驾驶,尤其涉及一种雷达保护装置及无人车。
背景技术:
1、无人车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶的目的。其集自动控制、体系结构、人工智能、视觉计算等众多技术于一体,能够通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标地。
2、无人车通常安装有激光雷达,用于感知外部环境,探测周围障碍物,从而辅助无人车进行加速、减速、变道等操作,实现无人车的自动控制。由于雷达安装支架设置在车辆的外部,且相对于车身向外凸出,当车辆发生碰撞时,刚性较大的雷达安装支架会将受到的力直接传递至雷达上,因此造成雷达的损坏,进而造成雷达维修成本的提高。
技术实现思路
1、本实用新型的目的在于提供一种雷达保护装置及无人车,以解决现有技术中当车辆发生碰撞时,刚性较大的雷达安装支架会将受到的力直接传递至雷达上,因此造成雷达的损坏,进而造成雷达维修成本提高的问题。
2、为达上述目的,本实用新型采用以下技术方案:
3、一方面,本实用新型提供一种雷达保护装置,用于保护雷达本体,该雷达保护装置包括:
4、安装支架;
5、安装立柱,上述安装立柱和上述雷达本体均设于上述安装支架上,且上述安装立柱与上述雷达本体间隔设置;
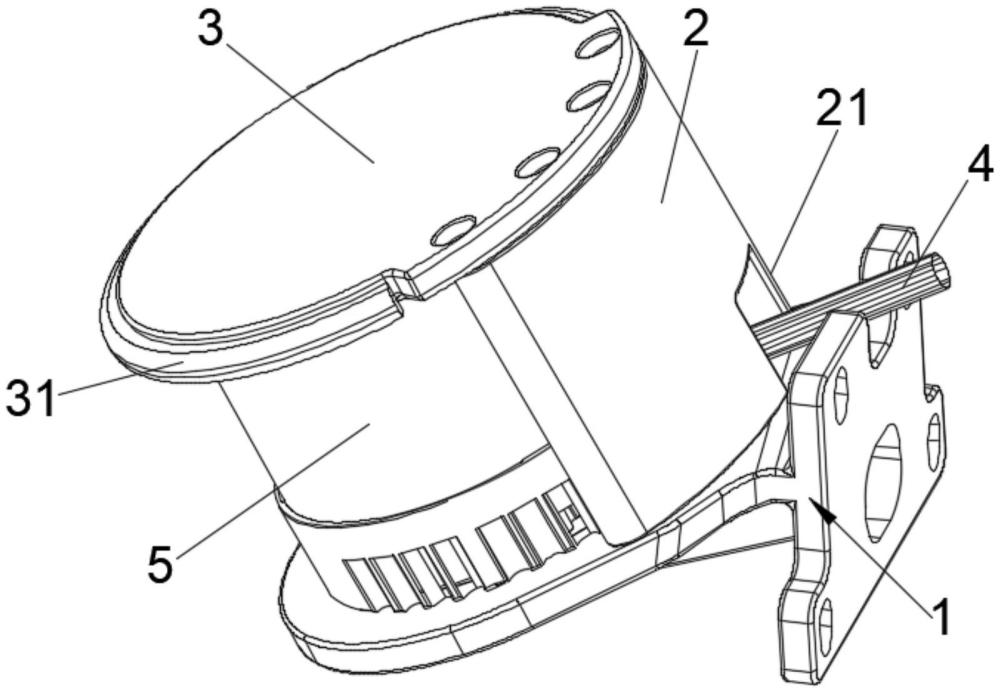
6、雷达帽,上述雷达帽连接于上述安装立柱,并盖设于上述雷达本体上;上述雷达帽的边缘设置有防撞触边,上述防撞触边沿水平方向相对于上述安装支架凸出设置。
7、作为上述雷达保护装置的一种可选方案,上述安装支架包括相互连接的连接板和支撑板,上述连接板可拆卸连接于无人车,上述支撑板可拆卸连接上述安装立柱和上述雷达本体;上述连接板和上述支撑板呈夹角设置,以使上述安装立柱、上述雷达本体和上述雷达帽均向下倾斜设置。
8、作为上述雷达保护装置的一种可选方案,上述安装立柱设于上述支撑板上靠近上述连接板的一端。
9、作为上述雷达保护装置的一种可选方案,上述安装立柱开设有避让槽,导线能够经由上述避让槽连接于上述雷达本体。
10、作为上述雷达保护装置的一种可选方案,上述安装支架还包括加强件,上述加强件分别连接于上述连接板和上述支撑板。
11、作为上述雷达保护装置的一种可选方案,上述雷达帽开设有安装槽,上述雷达本体嵌设于上述安装槽内,且上述安装槽的槽壁与上述雷达本体的侧壁间隔设置。
12、作为上述雷达保护装置的一种可选方案,上述防撞触边可拆卸连接于上述雷达帽。
13、另一方面,本实用新型提供一种无人车,包括如上述的雷达保护装置,上述无人车还包括保险杠,上述安装支架安装于上述保险杠上。
14、作为上述无人车的一种可选方案,上述保险杠上设置有底盘支架,上述底盘支架的边缘设置有底盘触边。
15、作为上述无人车的一种可选方案,上述底盘触边沿上述水平方向相对于上述防撞触边远离上述保险杠设置。
16、本实用新型的有益效果为:
17、该雷达保护装置包括安装支架、安装立柱和雷达帽。安装立柱和雷达本体均设于安装支架上,从而安装支架能够对雷达本体的下方进行防护,同时,雷达帽连接于安装立柱,并盖设于雷达本体上,以对雷达本体的上方进行防护。其中,雷达帽的边缘设置有防撞触边,防撞触边沿水平方向相对于安装支架凸出设置,从而雷达本体在行径过程出现碰撞后,防撞触边能够先一步对撞击力进行缓冲,且安装立柱与雷达本体间隔设置,从而防撞触边受到的力依次经过雷达帽和安装立柱后传递至安装支架,使得受到的力最终集中在安装支架上,以此避免了先碰撞到安装支架上时,安装支架将受到的力直接传递至雷达本体上,造成雷达本体的损坏,进而降低雷达本体的维修成本。
技术特征:
1.一种雷达保护装置,用于保护雷达本体(5),其特征在于,所述雷达保护装置包括:
2.根据权利要求1所述的雷达保护装置,其特征在于,所述安装立柱(2)设于所述支撑板(12)上靠近所述连接板(11)的一端。
3.根据权利要求2所述的雷达保护装置,其特征在于,所述安装立柱(2)开设有避让槽(21),导线(4)能够经由所述避让槽(21)连接于所述雷达本体(5)。
4.根据权利要求1所述的雷达保护装置,其特征在于,所述安装支架(1)还包括加强件(13),所述加强件(13)分别连接于所述连接板(11)和所述支撑板(12)。
5.根据权利要求1所述的雷达保护装置,其特征在于,所述雷达帽(3)开设有安装槽(32),所述雷达本体(5)嵌设于所述安装槽(32)内,且所述安装槽(32)的槽壁与所述雷达本体(5)的侧壁间隔设置。
6.根据权利要求1所述的雷达保护装置,其特征在于,所述防撞触边(31)可拆卸连接于所述雷达帽(3)。
7.一种无人车,其特征在于,包括如权利要求1~6任一项所述的雷达保护装置,所述无人车还包括保险杠(6),所述安装支架(1)安装于所述保险杠(6)上。
8.根据权利要求7所述的无人车,其特征在于,所述保险杠(6)上设置有底盘支架(61),所述底盘支架(61)的边缘设置有底盘触边(611)。
9.根据权利要求8所述的无人车,其特征在于,所述底盘触边(611)沿所述水平方向相对于所述防撞触边(31)远离所述保险杠(6)设置。
技术总结
本技术涉及无人驾驶技术领域,具体公开了一种雷达保护装置及无人车,雷达保护装置包括安装支架、安装立柱和雷达帽;安装立柱和雷达本体均设于安装支架上,且安装立柱与雷达本体间隔设置;雷达帽连接于安装立柱,并盖设于雷达本体上;其中,雷达帽的边缘设置有防撞触边,防撞触边沿水平方向相对于安装支架凸出设置。本技术中雷达本体在行径过程出现碰撞后,防撞触边能够先一步对撞击力进行缓冲,从而防撞触边受到的力依次经过雷达帽和安装立柱后传递至安装支架,使得受到的力最终集中在安装支架上,以此避免了先碰撞到安装支架上时,安装支架将受到的力直接传递至雷达本体上,造成雷达本体的损坏,进而降低雷达本体的维修成本。
技术研发人员:周珍义
受保护的技术使用者:上海易咖智车科技有限公司
技术研发日:20230721
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!