一种可调节式脚轮固定装置的制作方法
本技术具体涉及一种可调节式脚轮固定装置。
背景技术:
1、agv专用料车可以实现货物的自动转移,在工业上应用越来越广泛。agv专用料车在装卸货物过程中有时需要对专用料车的脚轮进行固定,防止其滑动或者偏离位置,以达到更精准地定位控制的目的。现有的脚轮固定装置大多通用性不强,只能用于某种尺寸脚轮的限位固定,对于脚轮尺寸差别较大的料车无法同时满足脚轮固定的需求,从而造成固定不稳,发生料车晃动或者料车定位偏离,导致agv无法精准地顶起料车。如果根据不同脚轮尺寸使用不同的脚轮固定装置,这样就需要使用多种不同规格的脚轮固定装置,增加了成本。
2、基于此,有必要提供一种可调节式脚轮固定装置,通过支撑件和砌块共同限位固定脚轮,可以调节支撑件和砌块之间的相对距离,以满足不同尺寸脚轮固定的需求。
技术实现思路
1、本实用新型目的是提供一种可调节式脚轮固定装置,解决现有技术中脚轮固定装置无法满足不同尺寸脚轮固定的不足。
2、为实现上述目的,采用以下技术方案
3、一种可调节式脚轮固定装置,其特征在于,包括两个角铁、砌块和支撑件;所述支撑件活动连接在两个角铁之间,所述砌块正对所述支撑件设置,使得支撑件和砌块配合共同对外部脚轮进行限位固定。
4、本实用新型中,两个所述角铁对称设置。
5、本实用新型可以做以下改进,每个角铁开有槽孔,所述支撑件的两端分别与一个角铁连接,使得支撑件在槽孔内来回移动。
6、进一步地,所述支撑件两端开有螺纹孔,通过螺栓穿过槽孔与螺纹孔配合使得支撑件与角铁连接。
7、进一步地,所述槽孔为腰孔。
8、进一步地,所述腰孔尺寸为50cm*8cm,半径为4cm。
9、本实用新型可以做以下改进,所述支撑件为长方体形,且截面为正方形。通过这样设置,支撑件与外部脚轮成线接触,方便将脚轮拉出脱离支撑件和砌块的固定。
10、进一步地,所述支撑件尺寸为30cm*30cm*100cm。
11、本实用新型还可以做以下改进,所述砌块为楔形块。通过这样设置,可以方便脚轮沿楔形块倾斜面移动,同时楔形块与脚轮也形成线接触,方便将脚轮拉出脱离支撑件和砌块的固定。
12、进一步地,所述楔形块的倾斜面与水平面的夹角小于3度。通过这样设置,可以方便将脚轮移动到支撑件与砌块之间的限位处。
13、本实用新型可以继续改进,还包括底板,所述砌块固定在底板上,两个所述角铁固定在底板上。
14、进一步地,所述底板为钢板,所述砌块材料为不锈钢,所述支撑件为方形钢。
15、与现有技术相比,本实用新型具有以下有益效果:
16、本实用新型可调节式脚轮固定装置,支撑件和角铁活动连接,通过移动支撑件,调整支撑件与砌块之间的相对距离,从而对不同尺寸的脚轮进行限位固定。
技术特征:
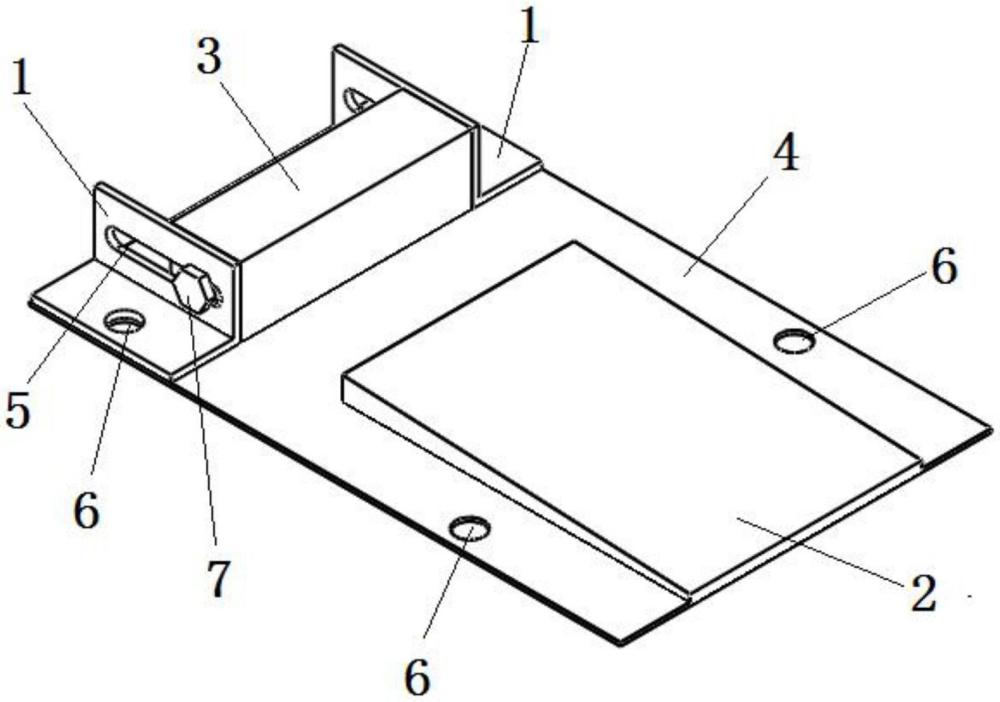
1.一种可调节式脚轮固定装置,其特征在于,包括两个角铁(1)、砌块(2)和支撑件(3);所述支撑件(3)活动连接在两个角铁(1)之间,所述砌块(2)正对所述支撑件(3)设置,使得支撑件(3)和砌块(2)配合共同对外部脚轮进行限位固定。
2.根据权利要求1所述可调节式脚轮固定装置,其特征在于,两个所述角铁(1)对称设置。
3.根据权利要求2所述可调节式脚轮固定装置,其特征在于,每个角铁(1)开有槽孔(5),所述支撑件(3)的两端分别与一个角铁(1)连接,使得支撑件(3)在槽孔(5)内来回移动。
4.根据权利要求3所述可调节式脚轮固定装置,其特征在于,所述支撑件(3)两端开有螺纹孔,通过螺栓(7)穿过槽孔(5)与螺纹孔配合使得支撑件(3)与角铁(1)连接。
5.根据权利要求4所述可调节式脚轮固定装置,其特征在于,所述槽孔(5)为腰孔。
6.根据权利要求5所述可调节式脚轮固定装置,其特征在于,所述支撑件(3)为长方体形,且截面为正方形。
7.根据权利要求1-6任一项所述可调节式脚轮固定装置,其特征在于,所述砌块(2)为楔形块。
8.根据权利要求7所述可调节式脚轮固定装置,其特征在于,所述楔形块的倾斜面与水平面的夹角小于3度。
9.根据权利要求7所述可调节式脚轮固定装置,其特征在于,还包括底板(4),所述砌块(2)固定在底板(4)上,两个所述角铁(1)固定在底板(4)上。
10.根据权利要求9所述可调节式脚轮固定装置,其特征在于,所述底板(4)为钢板,所述砌块(2)材料为不锈钢,所述支撑件(3)为方形钢。
技术总结
本技术提供了一种可调节式脚轮固定装置,包括两个角铁、砌块和支撑件;所述支撑件活动连接在两个角铁之间,所述砌块正对所述支撑件设置,使得支撑件和砌块配合共同对外部脚轮进行限位固定。本技术可调节式脚轮固定装置,支撑件和角铁活动连接,通过移动支撑件,调整支撑件与砌块之间的相对距离,从而对不同尺寸的脚轮进行限位固定。
技术研发人员:林宇
受保护的技术使用者:宇特智能装备(广州)有限公司
技术研发日:20230807
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!