驱动单元的制作方法
本技术涉及驱动单元。
背景技术:
1、提出了一种不仅具有电动马达或发动机等驱动源,还具有辅助性地输出转矩的辅助电动马达的驱动单元。例如,专利文献1所公开的驱动装置具有发动机与辅助电动马达,以发动机作为驱动源的主体,通过辅助电动马达进行发动机的转矩的协助。
2、专利文献1:日本特开2006-160096号公报
3、在如上所述的驱动单元中,在驱动源以高速旋转的情况下,该驱动源的旋转向辅助电动马达传递,其结果,存在辅助电动马达高速旋转,且辅助电动马达的逆变电压超过最大额定电压的担忧。
4、本实用新型的课题在于,防止辅助电动马达超过最大额定电压而旋转。
技术实现思路
1、第一方面涉及的驱动单元具备驱动源;轴,构成为传递所述驱动源输出的转矩;辅助电动马达;以及离合器,配置于所述轴与所述辅助电动马达之间,所述离合器构成为从所述辅助电动马达向所述轴传递正旋转及逆旋转的动力,并且阻断从所述轴向所述辅助电动马达的正旋转及逆旋转的转矩传递。
2、根据该构成,即便驱动源以超过辅助电动马达的最大额定电压那样的旋转速度旋转,离合器也不会将该驱动源的旋转传递到辅助电动马达。其结果,能够防止辅助电动马达超过最大额定电压而旋转。
3、第二方面涉及的驱动单元在第一方面涉及的驱动单元中,如下构成。所述驱动源为主电动马达。
4、第三方面涉及的驱动单元在第二方面涉及的驱动单元中,如下构成。所述辅助电动马达具有相比于所述主电动马达,最大旋转速度低且最大转矩大的特性。
5、第四方面涉及的驱动单元在第一至第三方面中的任一方面所涉及的驱动单元中,如下构成。所述辅助电动马达与所述驱动源在同轴上配置。
6、第五方面涉及的驱动单元在第一至第三方面中的任一方面所涉及的驱动单元中,如下构成。所述辅助电动马达与所述驱动源在不同轴上配置。
7、第六方面涉及的驱动单元在第一至第五方面中的任一方面所涉及的所述驱动单元还具备控制部,所述控制部构成为对所述驱动源与所述辅助电动马达进行控制,所述控制部在车速为阈值以下时至少驱动所述辅助电动马达,并且在车速超过了所述阈值时驱动所述驱动源且使所述辅助电动马达停止。
8、第七方面涉及的驱动单元在第一至第五方面中的任一方面所涉及的所述驱动单元还具备控制部,所述控制部构成为对所述驱动源与所述辅助电动马达进行控制,所述控制部在车速为第一阈值以下时驱动所述驱动源及所述辅助电动马达,并且在车速超过了所述第一阈值时驱动所述驱动源且使所述辅助电动马达停止,在车速为比所述第一阈值低的第二阈值以下且所需转矩为第三阈值以下的情况下,使所述驱动源停止且驱动所述辅助电动马达。
9、第八方面涉及的驱动单元在第一至第七方面中的任一方面所涉及的驱动单元中,如下构成。离合器具有;输入旋转部件,构成为被从所述辅助电动马达输入转矩;输出旋转部件,构成为向所述轴输出转矩,与所述输入旋转部件在径向上隔开间隔来配置;以及传递部件,配置于所述输入旋转部件与所述输出旋转部件之间,能够采取在与所述输出旋转部件之间具有间隙的非卡合状态以及在所述输入旋转部件与所述输出旋转部件之间啮合的卡合状态,当所述输入旋转部件相对于所述传递部件相对地旋转时,所述传递部件成为所述卡合状态。
10、第九方面涉及的驱动单元在第八方面涉及的驱动单元中,如下构成。所述离合器具有将所述传递部件施力为非卡合状态的施力部件。
11、第十方面涉及的驱动单元在第八或第九方面涉及的驱动单元中,如下构成。所述离合器具有在所述输入旋转部件与所述输出旋转部件之间配置的保持部件,所述保持部件配置为能够与所述输入旋转部件和所述输出旋转部件相对旋转,并保持所述传递部件。
12、实用新型效果
13、根据本实用新型,能够防止辅助电动马达超过最大额定电压而旋转。
技术特征:
1.一种驱动单元,其特征在于,具备:
2.根据权利要求1所述的驱动单元,其特征在于,
3.根据权利要求2所述的驱动单元,其特征在于,
4.根据权利要求1所述的驱动单元,其特征在于,
5.根据权利要求1所述的驱动单元,其特征在于,
6.根据权利要求1所述的驱动单元,其特征在于,
7.根据权利要求1所述的驱动单元,其特征在于,
8.根据权利要求1所述的驱动单元,其特征在于,
9.根据权利要求8所述的驱动单元,其特征在于,
10.根据权利要求8或9所述的驱动单元,其特征在于,
技术总结
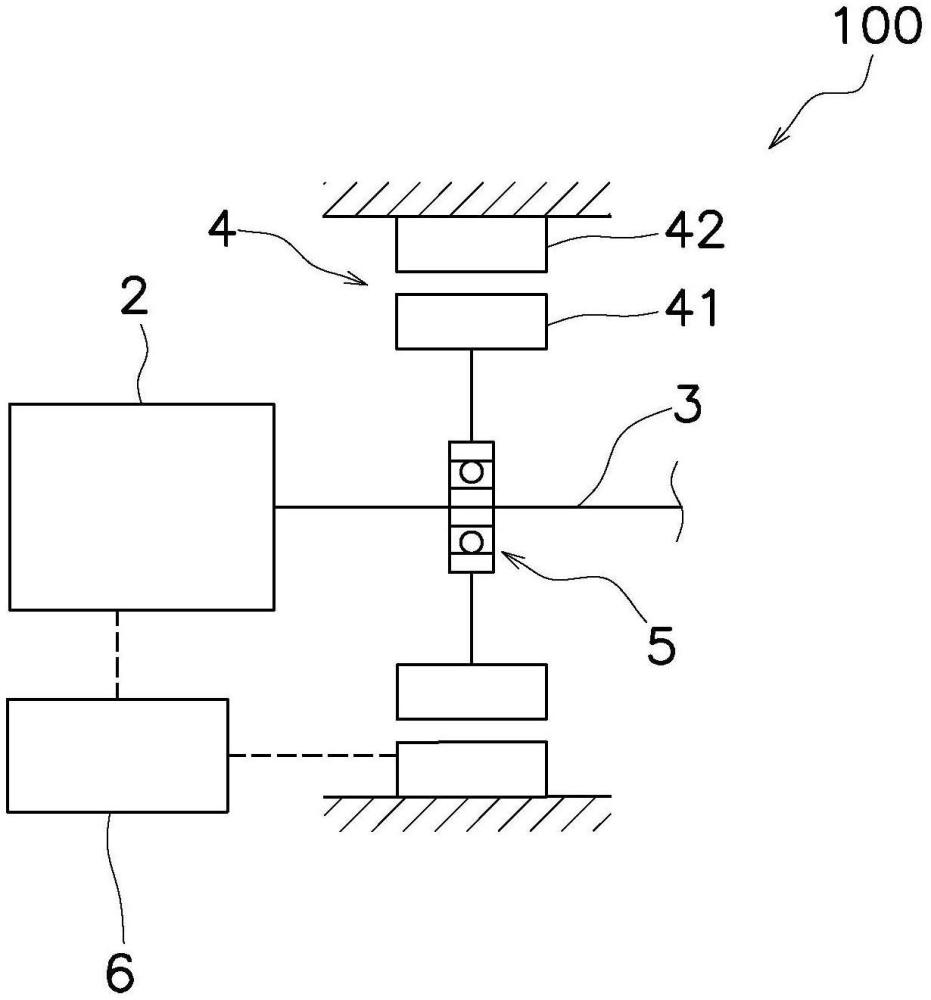
本技术涉及一种驱动单元,防止辅助电动马达超过最大额定电压而旋转。驱动单元(100)具备驱动源(2)、轴(3)、辅助电动马达(4)以及离合器(5)。轴(3)构成为传递驱动源(2)所输出的转矩。离合器(5)配置于轴(3)与辅助电动马达(4)之间。离合器(5)构成为从辅助电动马达(4)向轴(3)传递正旋转与逆旋转的动力,并且阻断从轴(3)向辅助电动马达(4)的正旋转与逆旋转的转矩传递。
技术研发人员:河原裕树,美浓羽未纱树,寺林均
受保护的技术使用者:株式会社 艾科赛迪
技术研发日:20230818
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!