司机室双区域电动屏幕翻转装置的制作方法
本技术涉及轨道交通,特别是涉及一种司机室双区域电动屏幕翻转装置。
背景技术:
1、随着近年来轨道交通行业中无人驾驶技术的日益成熟,越来越多的地铁及市域车项目开始使用无人驾驶。对于无人驾驶的使用,与传统地铁及市域车的最大区别就在于,乘客可以自由出入司机室,这也对司机室操纵台提出了更多新的要求。
2、由于无人驾驶操纵台外观与功能等因素,导致了无人驾驶操纵台需要在相较于传统操纵台更小的空间内布置与传统操纵台一样多的司机操作设备,以保证列车切换为手动驾驶模式时,操纵台能满足于司机对于列车控制的要求。
3、目前无人驾驶操纵台为单区域翻转结构,但是随着对操纵台翻转要求的进一步提高,需要对同一操纵台中不同区域的屏幕分别进行翻转,该双区域翻转的要求使机构所能使用的空间成倍缩小,这就导致了对翻转机构的设计难度加大。
4、因此,有必要提供一种双区域屏幕翻转结构,以克服上述问题。
技术实现思路
1、本实用新型主要解决的技术问题是提供一种司机室双区域电动屏幕翻转装置,能够在狭小有限的空间内实现两个区域内翻转台面的独立翻转功能,提高了无人驾驶操纵台的安全性。
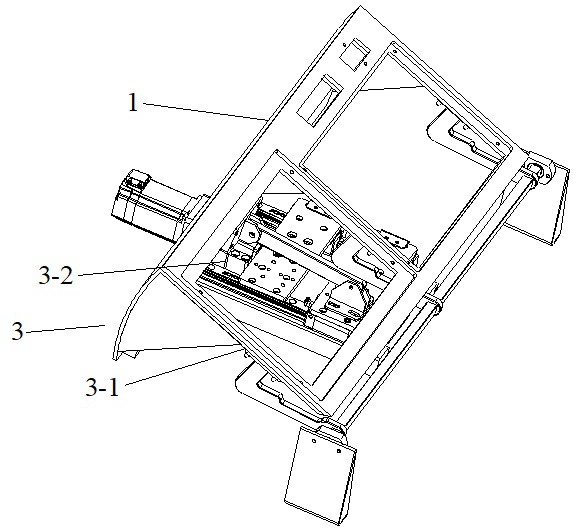
2、为解决上述技术问题,本实用新型采用的一个技术方案是:提供一种司机室双区域电动屏幕翻转装置,包括:操纵台,所述操纵台上具有分区设置的翻转台面一和翻转台面二,
3、所述操纵台内部具有能够驱动翻转台面一独立翻转的翻转单元一、以及能够驱动翻转台面二独立翻转的翻转单元二,
4、所述翻转单元一包括翻转机构一和行走机构一,所述翻转机构一与翻转台面一相连,所述行走机构一与翻转机构一相连,该行走机构一的运动带动翻转机构一转动,从而使翻转台面一翻转,实现翻转台面一的上升打开。
5、在本实用新型一个较佳实施例中,所述翻转机构一包括:翻转转轴、翻转摆臂、第一支座、第二支座和联动摆臂,所述翻转台面一的一端通过翻转转轴安装在操纵台上,所述翻转摆臂的一端连接翻转转轴,翻转摆臂的另一端连接翻转台面一,所述第一支座安装在翻转台面一的另一端,所述第二支座安装在行走机构一上,所述联动摆臂的两端分别连接第一支座和第二支座。
6、在本实用新型一个较佳实施例中,所述行走机构一包括电机、丝杠、直线导轨和行走底板,所述丝杠的一端与电机相连接,丝杠另一端固定在基座上,所述直线导轨对称安装在丝杠的两侧且与丝杠平行设置,所述行走底板的两端分别与两根直线导轨相连,所述行走底板的中间与丝杠相连。
7、在本实用新型一个较佳实施例中,所述第二支座安装在所述行走底板上,所述丝杠被电机驱动进行旋转,从而使行走底板沿着直线导轨运动,行走底板的运动带动联动摆臂和翻转摆臂转动,使翻转台面一翻转。
8、在本实用新型一个较佳实施例中,所述翻转台面一的转动角度范围为0-60°。
9、在本实用新型一个较佳实施例中,所述翻转单元二的结构与翻转单元一的结构相同,所述翻转单元二与翻转单元一在操纵台内部并排布置。
10、本实用新型的有益效果是:
11、能够在狭小有限的空间内实现两个区域内翻转台面的独立翻转功能,迎合了轨道交通中无人驾驶操纵台多区域分别翻转的要求,提高了无人驾驶操纵台的安全性,为以后无人驾驶操纵台的形式多提供了一种可能。
技术特征:
1.一种司机室双区域电动屏幕翻转装置,包括:操纵台,其特征在于,所述操纵台上具有分区设置的翻转台面一和翻转台面二,
2.根据权利要求1所述的司机室双区域电动屏幕翻转装置,其特征在于,所述翻转机构一包括:翻转转轴、翻转摆臂、第一支座、第二支座和联动摆臂,所述翻转台面一的一端通过翻转转轴安装在操纵台上,所述翻转摆臂的一端连接翻转转轴,翻转摆臂的另一端连接翻转台面一,所述第一支座安装在翻转台面一的另一端,所述第二支座安装在行走机构一上,所述联动摆臂的两端分别连接第一支座和第二支座。
3.根据权利要求2所述的司机室双区域电动屏幕翻转装置,其特征在于,所述行走机构一包括电机、丝杠、直线导轨和行走底板,所述丝杠的一端与电机相连接,丝杠另一端固定在基座上,所述直线导轨对称安装在丝杠的两侧且与丝杠平行设置,所述行走底板的两端分别与两根直线导轨相连,所述行走底板的中间与丝杠相连。
4.根据权利要求3所述的司机室双区域电动屏幕翻转装置,其特征在于,所述第二支座安装在所述行走底板上,所述丝杠被电机驱动进行旋转,从而使行走底板沿着直线导轨运动,行走底板的运动带动联动摆臂和翻转摆臂转动,使翻转台面一翻转。
5.根据权利要求4所述的司机室双区域电动屏幕翻转装置,其特征在于,所述翻转台面一的转动角度范围为0-60°。
6.根据权利要求1~5任一项所述的司机室双区域电动屏幕翻转装置,其特征在于,所述翻转单元二的结构与翻转单元一的结构相同,所述翻转单元二与翻转单元一在操纵台内部并排布置。
技术总结
本技术公开了一种司机室双区域电动屏幕翻转装置,包括:操纵台,所述操纵台上具有分区设置的翻转台面一和翻转台面二,所述操纵台内部具有能够驱动翻转台面一独立翻转的翻转单元一、以及能够驱动翻转台面二独立翻转的翻转单元二,所述翻转单元一包括翻转机构一和行走机构一,所述翻转机构一与翻转台面一相连,所述行走机构一与翻转机构一相连,该行走机构一的运动带动翻转机构一转动,从而使翻转台面一翻转,实现翻转台面一的上升打开。通过上述方式,本技术司机室双区域电动屏幕翻转装置能够在狭小有限的空间内实现两个区域内翻转台面的独立翻转功能,提高了无人驾驶操纵台的安全性。
技术研发人员:杜新,戴悦
受保护的技术使用者:常州今创电工有限公司
技术研发日:20230828
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!