足式机器人、四轮足机器人及机器人的制作方法
本申请属于机器人,具体的说,涉及足式机器人、四轮足机器人及机器人。
背景技术:
1、现有四足机器人有时在机身上设置水平安装的3d摄像模组,用于获取机器人两侧的环境空间内的地况信息,以便根据不同地况规划机器人行进路径和避障。
2、但此种设置方式,对于距离机器人侧下方较近的位置会存在视野盲区,且由于此种3d摄像模组设置方式,拍摄范围较广且较远,获取的信息要素过多,且容易失真,导致机器人对常无法成功识别到障碍物,进而导致机器人与障碍物发生碰撞。
技术实现思路
1、为了解决上述问题,本申请提出了足式机器人、四轮足机器人及机器人。旨在解决上述背景技术中提出的技术问题。
2、为达到上述目的,本申请一方案中,提供了
3、一种足式机器人,包括:
4、机身壳体;
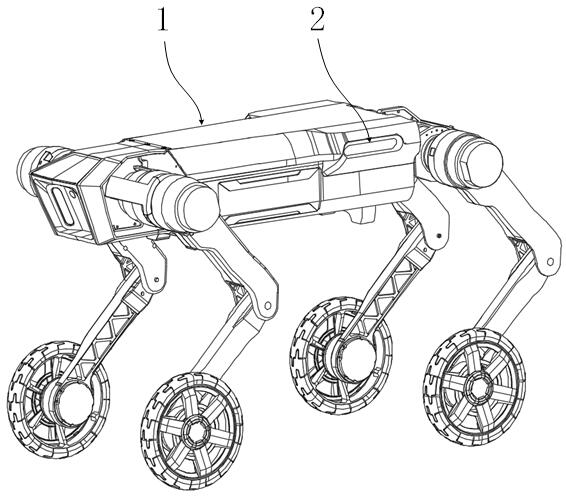
5、两个3d摄像模组,两个所述3d摄像模组分别嵌设于所述机身壳体两侧,所述3d摄像模组用于获取点云图像;
6、所述3d摄像模组相对于所述机身壳体向下倾斜设置,所述摄像模组与水平方向的夹角为大于15度,且小于45度。
7、在一个方案中,所述摄像模组与水平方向的夹角设置为大于22度且小于32度。
8、在一个方案中,所述的足式机器人还包括:
9、固定件;
10、所述固定件构造有一体成型的支撑板和连接板,所述支撑板与所述连接板的夹角大于55度、小于90度,所述连接板固定设置于所述机身壳体的内壁上,所述3d摄像模组固定设置于所述支撑板上。
11、在一个方案中,所述支撑板与所述连接板的夹角设置为大于55度且小于65度。
12、在一个方案中,所述固定件上构造有向所述支撑板与所述连接板开口处内缩的第一避位支撑部;
13、所述固定件相对于所述第一避位支撑部的另一侧构造有由所述支撑板向所述连接板收缩的第二避位支撑部。
14、在一个方案中,所述固定件设置在机身壳体靠近机器人后腿部分的一端上,所述第一避位支撑部在所述机身壳体宽度方向上的投影与机器人后腿的摆腿关节模组部分重叠。
15、在一个方案中,所述的足式机器人还包括:
16、遮罩件;
17、所述机身壳体包括相互对接的上壳体和下壳体,所述上壳体具有遮罩部;
18、所述遮罩件固定设置于所述固定件的外侧,所述遮罩件与所述上壳体的遮罩部配合对所述3d摄像模组形成遮罩。
19、在一个方案中,所述遮罩件具有固定部及一呈中空环状的定位架;
20、所述遮罩部构造有延竖直方向凹陷的安装槽;
21、所述固定部与所述下壳体固定连接,所述3d摄像模组的镜头端嵌设于所述定位架之内,所述定位架相对于所述下壳体的一侧嵌入所述安装槽内,进而通过所述上壳体与所述下壳体夹持所述遮罩件设置,从而通过所述上壳体、所述下壳体及所述遮罩件对所述3d摄像模组形成遮罩。
22、在一个方案中,所述3d摄像模组相对于所述遮罩件内缩设置。
23、在一个方案中,所述下壳体上构造有嵌槽,所述固定部嵌设于所述嵌槽内。
24、在一个方案中,所述连接板上间隔设置第一连接柱,所述固定部上设置有与所述第一连接柱一一对应的第二连接柱,通过紧固件从所述固定部相对于所述下壳体的另一侧依次穿过所述第二连接柱及所述第一连接柱,进而将所述固定件和所述遮罩件相互固定。
25、在一个方案中,所述连接板构造有用于过线的第一出口和第二出口;
26、在竖直方向上所述遮罩部的投影与所述3d摄像模组的投影相互重叠,所述遮罩件的投影与所述3d摄像模组的投影部分重叠。
27、在一个方案中,在竖直方向上所述3d摄像模组的投影至少二分之一位于所述下壳体的外延之外。
28、在一个方案中,本申请提供了一种四轮足机器人,包括上述的足式机器人。
29、在一个方案中,本申请提供了一种机器人,包括上述的足式机器人。
30、本申请的有益效果:
31、本申请通过将3d摄像模组向下倾斜安装在机身壳体的两侧,使3d摄像模组能够拍摄到距离机身较近的空间位置,且有效避免了3d摄像模组拍摄的点云图失真的问题,从而让机器人充分的掌握机身两侧地况信息,及时规避地面上的障碍物或者凹陷,避免行进时被干涉,机器人行进更加平稳。
技术特征:
1.一种足式机器人,其特征在于,包括:
2.根据权利要求1所述的足式机器人,其特征在于,所述摄像模组与水平方向的夹角设置为大于22度且小于32度。
3.根据权利要求1所述的足式机器人,其特征在于,还包括:
4.根据权利要求3所述的足式机器人,其特征在于,所述支撑板与所述连接板的夹角设置为大于55度且小于65度。
5.根据权利要求3所述的足式机器人,其特征在于,
6.根据权利要求5所述的足式机器人,其特征在于,
7.根据权利要求3-6任一项所述的足式机器人,其特征在于,还包括:
8.根据权利要求7所述的足式机器人,其特征在于,
9.根据权利要求8所述的足式机器人,其特征在于,
10.根据权利要求9所述的足式机器人,其特征在于,
11.根据权利要求10所述的足式机器人,其特征在于,
12.根据权利要求11所述的足式机器人,其特征在于,
13.根据权利要求12所述的足式机器人,其特征在于,在竖直方向上所述3d摄像模组的投影至少二分之一位于所述下壳体的外延之外。
14.一种四轮足机器人,其特征在于,包括权利要求1-13任一项所述的足式机器人。
15.一种机器人,其特征在于,包括权利要求1-13任一项所述的足式机器人。
技术总结
本申请涉及足式机器人、四轮足机器人及机器人,属于机器人技术领域。包括机身壳体及两个3D摄像模组,两个3D摄像模组分别嵌设于机身壳体两侧,3D摄像模组用于获取点云图像;3D摄像模组相对于机身壳体向下倾斜设置,摄像模组与水平方向的夹角为大于15度,且小于45度。本申请通过将3D摄像模组向下倾斜安装在机身壳体的两侧,使3D摄像模组能够拍摄到距离机身较近的空间位置,且有效避免了3D摄像模组拍摄的点云图失真的问题,从而让机器人充分的掌握机身两侧地况信息,及时规避地面上的障碍物或者凹陷,避免行进时被干涉,机器人行进更加平稳。
技术研发人员:陈健,杨宇,沈悰
受保护的技术使用者:深圳逐际动力科技有限公司
技术研发日:20230925
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!