一种无人车摄像头清扫结构的制作方法
本技术涉及摄像头自动清扫,尤其涉及一种无人车摄像头清扫结构。
背景技术:
1、随着科技的进步,无人车在我们的生活中开始发挥出了至关重要的作用,无人车是一种通过电脑系统实现无人驾驶的智能汽车,依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆,但在行驶过程中易受各种复杂路况的制约。
2、公开号cn114407834a提供了一种摄像头自动清扫系统,利用气体喷涂吹扫车窗内外壁上附着的水滴和水雾,可以有效地避免对摄像头传感器的视野干扰,然而在路面上行驶还可能存在鸟类粪便和昆虫尸体等不易清除的物体,在摄像头表面存在会造成摄像头盲区,影响行驶安全。
技术实现思路
1、基于上述所提到的在路面上行驶还可能存在鸟类粪便和昆虫尸体等不易清除的物体,在摄像头表面存在会造成摄像头盲区,影响行驶安全技术问题,本实用新型提出了一种无人车摄像头清扫结构。
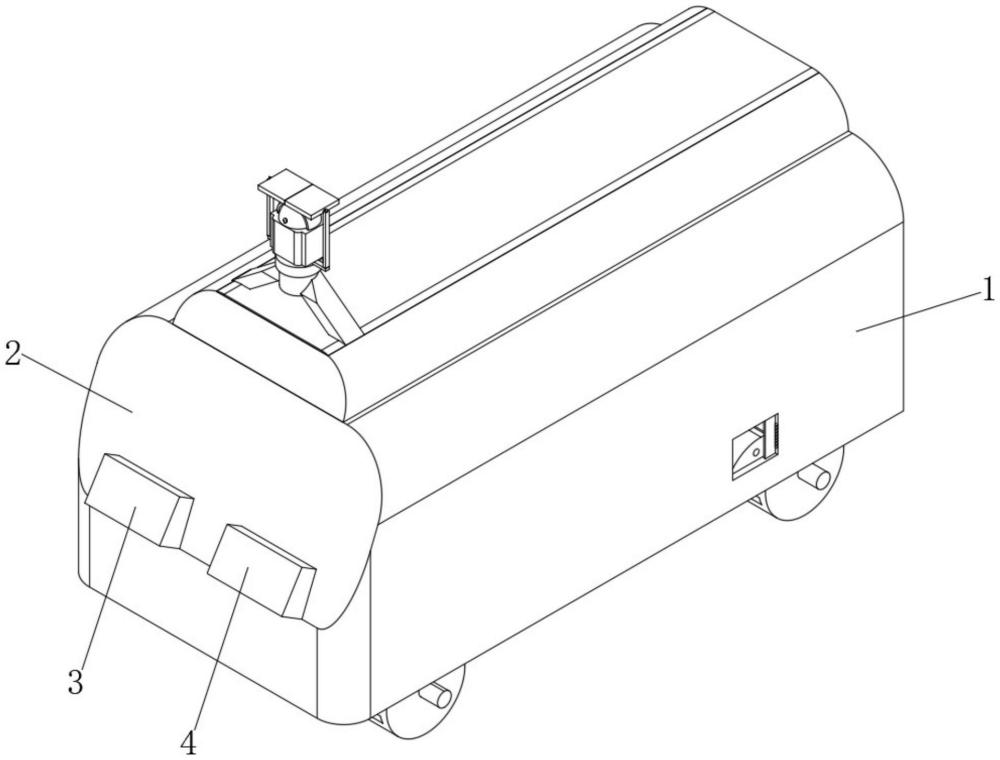
2、本实用新型提出的一种无人车摄像头清扫结构,包括车体,所述车体端部固定连接有发动机舱,所述发动机舱内部安装有玻璃水壶和气源装置,所述车体顶部呈对称结构固定连接有两个支撑柱,所述支撑柱端部固定连接有调控装置,所述调控装置顶部固定连接有驱动组件,所述驱动组件顶部分别安装有气流柱和水柱,所述气流柱端部安装有气板,所述水柱端部安装有水板。
3、优选地,所述水柱和气流柱固定连接有底座,所述底座顶部固定连接有摄像头,所述摄像头外部设有保护壳。
4、优选地,所述驱动组件包括电机,所述电机输出端固定连接有第一锥齿,所述第一锥齿啮合连接有第二锥齿,所述第二锥齿底部固定连接有连接杆二,所述连接杆二端部与驱动组件内壁固定连接,所述第二锥齿齿轮端固定连接有连接杆一,所述连接杆一端部固定连接有转轮。
5、优选地,所述转轮开设有单排孔和双排孔。
6、优选地,所述水板和气板分别开设有多个通孔,所述通孔位于摄像头正上方。
7、优选地,所述车体、支撑柱、调控装置、驱动组件、水柱、气流柱、水板和气板均开设有两个安装孔,所述安装孔内分别安装有喷气管和水管。
8、本实用新型中的有益效果为:
9、1、本发明提供的无人车摄像头清扫结构,在无人驾驶车辆行驶过程中,当摄像头前端因雷雨天气或温差布满水滴和水雾,导致摄像头识别困难时,车主可以通过远程通信与车载控制系统连接,控制系统收到指令,调控装置启动,电机带动转轮转动,转轮上的单排孔与喷气管重合,气源装置向喷气管内输送气体,气体沿管路流动,从气板的通孔吹出,能将保护壳上水滴和水雾快速吹散吹干,并且清理过程中不会遮挡摄像头的识别。
10、2、当无人车行驶在路面上,由于偶然或季节等种种因素,鸟类粪便或飞虫尸体会存在于保护壳上,此类物体在气体的吹扫下不仅不会消失,反而可能扩大面积,加重影响,车主可通过车载系统控制电机转动,转轮上的双排孔与喷气管和水管分别重合,玻璃水壶内的玻璃水沿着水管流动,通过水板上的通孔对保护壳进行冲洗,由于玻璃水内的酒精具有溶解胶质的作用,对于鸟类粪便以及飞虫尸体具有较好的清洁作用,喷气管内的气体对清洁后的污水进行冲喷,避免污水影响摄像头的使用。
11、3、本实用新型利用流动的气体和汽车自身的玻璃水作为无人驾驶车载摄像头清扫系统的动力来源,避免了气体清扫装置适用范围狭窄,清洁力度不足的问题,解决了天气及温差对摄像头传感器的干扰,提高了无人驾驶车辆的行驶安全性,同时还可以通过控制系统对车辆进行远程监控,实时保证摄像头前端的清洁干净,提高摄像头传感器的识别准确性,提高无人车的智能性。
技术特征:
1.一种无人车摄像头清扫结构,包括车体(1),其特征在于:所述车体(1)端部固定连接有发动机舱(2),所述发动机舱(2)内部安装有玻璃水壶(3)和气源装置(4),所述车体(1)顶部呈对称结构固定连接有两个支撑柱(5),所述支撑柱(5)端部固定连接有调控装置(6),所述调控装置(6)顶部固定连接有驱动组件(7),所述驱动组件(7)顶部分别安装有气流柱(8)和水柱(9),所述气流柱(8)端部安装有气板(13),所述水柱(9)端部安装有水板(12)。
2.根据权利要求1所述的无人车摄像头清扫结构,其特征在于:所述水柱(9)和气流柱(8)固定连接有底座(14),所述底座(14)顶部固定连接有摄像头(15),所述摄像头(15)外部设有保护壳(16)。
3.根据权利要求1所述的无人车摄像头清扫结构,其特征在于:所述驱动组件(7)包括电机(701),所述电机(701)输出端固定连接有第一锥齿(702),所述第一锥齿(702)啮合连接有第二锥齿(703),所述第二锥齿(703)底部固定连接有连接杆二(706),所述连接杆二(706)端部与驱动组件(7)内壁固定连接,所述第二锥齿(703)齿轮端固定连接有连接杆一(704),所述连接杆一(704)端部固定连接有转轮(705)。
4.根据权利要求3所述的无人车摄像头清扫结构,其特征在于:所述转轮(705)开设有单排孔和双排孔。
5.根据权利要求1所述的无人车摄像头清扫结构,其特征在于:所述水板(12)和气板(13)分别开设有多个通孔,所述通孔位于摄像头(15)正上方。
6.根据权利要求1所述的无人车摄像头清扫结构,其特征在于:所述车体(1)、支撑柱(5)、调控装置(6)、驱动组件(7)、水柱(9)、气流柱(8)、水板(12)和气板(13)均开设有两个安装孔,所述安装孔内分别安装有喷气管(10)和水管(11)。
技术总结
本技术属于摄像头自动清扫技术领域,公开了一种无人车摄像头清扫结构,包括车体,所述车体端部固定连接有发动机舱,所述发动机舱内部安装有玻璃水壶和气源装置,所述调控装置顶部固定连接有驱动组件,所述驱动组件顶部分别安装有气流柱和水柱,所述气流柱端部安装有气板,所述水柱端部安装有水板,所述水柱和气流柱固定连接有底座,所述底座顶部固定连接有摄像头。当摄像头前方出现遮挡时,电机带动第一锥齿转动,第一锥齿带动第二锥齿转动,第二锥齿通过连接杆一带动转轮转动,车载控制系统根据需要启动玻璃水壶或气源装置,水流或气流顺着管路从通孔排出,对遮挡物体进行冲洗,从而实现无人车摄像头的自动清扫。
技术研发人员:张振操
受保护的技术使用者:张振操
技术研发日:20230926
技术公布日:2024/5/29
- 还没有人留言评论。精彩留言会获得点赞!