用于机器人的前轮组件、机器人和割草机器人的制作方法
本技术涉及机器人领域,尤其涉及一种用于机器人的前轮组件、机器人和割草机器人。
背景技术:
1、机器人,具有自动行走、智能避障、在一定范围内工作等功能。机器人在行走的过程中可能会经过地形复杂的路面,在工作时容易出现打滑、爬坡能力不足、越障能力差等问题,导致用户体验差。比如割草机器人,应用在户外草坪,草坪多有凹凸不平的路面,割草机器人在工作时存在越障和过坑困难等等问题。
技术实现思路
1、本实用新型要解决的技术问题在于,背景技术中存在的至少一个问题,提供改进后的一种用于机器人的前轮组件、机器人和割草机器人。
2、本实用新型解决其技术问题所采用的技术方案是:构造一种用于机器人的前轮组件,包括两个车轮,所述前轮组件还包括用于安装在所述机器人的底盘上的横梁,所述两个车轮安装在所述横梁的两端;
3、所述前轮组件还包括可与所述底盘相连接的横梁转轴,所述横梁转轴沿所述横梁的宽度方向穿设于所述横梁上,所述横梁可绕所述横梁转轴转动;
4、所述前轮组件还包括两个减震结构,分别设于所述横梁上穿设有所述横梁转轴位置的两侧,所述减震结构包括与所述横梁的转动配合以在所述车轮遇障时压缩及在所述车轮过坑时伸长的弹簧,所述弹簧的一端可与所述底盘连接,所述弹簧的另一端与所述横梁连接。
5、在一些实施例中,所述减震结构包括用于安装在所述底盘上的装配件,以及跟随所述横梁活动的压盘,所述装配件设有位于所述压盘上方的限位挡板,所述限位挡板与所述压盘之间具有间距,所述间距小于所述弹簧在自然状态下的长度;
6、所述弹簧装于所述限位挡板和所述压盘之间。
7、在一些实施例中,所述减震结构包括导杆,所述导杆包括固定端和与所述固定端相对的自由端,所述固定端与所述横梁固定连接,所述自由端穿过所述限位挡板并向外延伸;
8、所述弹簧套设于所述导杆上,所述压盘固定在所述导杆上。
9、在一些实施例中,所述减震结构还包括套设在所述导杆上,位于所述自由端和所述限位挡板之间的弹簧支架,所述导杆可在所述弹簧支架中做轴向位移。
10、在一些实施例中,所述固定端位于所述横梁转轴的下方,所述导杆倾斜设置,且所述自由端相对所述固定端偏向于所述车轮一侧;
11、或者,所述固定端位于所述横梁转轴的上方,所述导杆倾斜设置,且所述固定端相对所述自由端偏向于所述车轮一侧;
12、或者,所述固定端与所述横梁转轴位于同一高度,所述导杆竖直设置。
13、在一些实施例中,所述装配件还包括用于安装在所述底盘上的固定板,以及结合于所述固定板、位于所述横梁宽度方向的两侧的两个限位柱,所述两个限位柱之间的间距大于所述横梁的宽度。
14、在一些实施例中,所述减震结构包括两个所述弹簧,分别设于所述横梁沿其宽度方向的两侧。
15、在一些实施例中,所述前轮组件还包括用于将所述横梁安装在所述底盘上的固定组件,
16、所述固定组件包括用于安装在所述底盘上的固定座、固定式地安装于所述横梁上的浮动立轴,以及插销,所述浮动立轴设有穿设于所述固定座中的配合部,并通过所述插销卡在所述固定座中,所述浮动立轴可在所述固定座中往复位移。
17、本实用新型还构造一种机器人,包括用于移动的车体,所述车体包括底盘,以及安装于所述底盘上的后轮组件,所述车体还包括上述的前轮组件,所述前轮组件安装于所述底盘上。
18、本实用新型还构造一种割草机器人,其为上述的机器人,所述机器人还包括安装在所述车体上、用于割草的工作机构。
19、实施本实用新型具有以下有益效果:本实用新型的前轮组件用于安装在机器人的底盘上,在机器人装配本前轮组件后,有效确保机器人在越障、过坑时保持抓地,机器人的越障和过坑能力得以提升。
技术特征:
1.一种用于机器人的前轮组件,包括两个车轮(2),其特征在于,所述前轮组件还包括用于安装在所述机器人的底盘(1)上的横梁(31),所述两个车轮(2)安装在所述横梁(31)的两端;
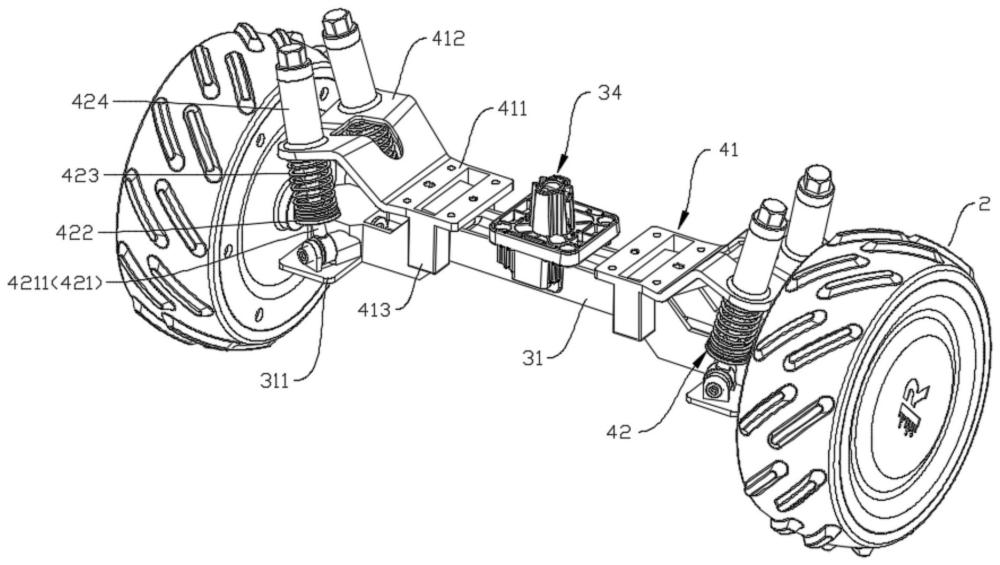
2.根据权利要求1所述的用于机器人的前轮组件,其特征在于,所述减震结构(4)包括用于安装在所述底盘(1)上的装配件(41),以及跟随所述横梁(31)活动的压盘(422),所述装配件(41)设有位于所述压盘(422)上方的限位挡板(412),所述限位挡板(412)与所述压盘(422)之间具有间距,所述间距小于所述弹簧(423)在自然状态下的长度;
3.根据权利要求2所述的用于机器人的前轮组件,其特征在于,所述减震结构(4)包括导杆(421),所述导杆(421)包括固定端和与所述固定端相对的自由端,所述固定端与所述横梁(31)固定连接,所述自由端穿过所述限位挡板(412)并向外延伸;
4.根据权利要求3所述的用于机器人的前轮组件,其特征在于,所述减震结构(4)还包括套设在所述导杆(421)上,位于所述自由端和所述限位挡板(412)之间的弹簧支架(424),所述导杆(421)可在所述弹簧支架(424)中做轴向位移。
5.根据权利要求3所述的用于机器人的前轮组件,其特征在于,所述固定端位于所述横梁转轴(32)的下方,所述导杆(421)倾斜设置,且所述自由端相对所述固定端偏向于所述车轮(2)一侧;
6.根据权利要求2所述的用于机器人的前轮组件,其特征在于,所述装配件(41)还包括用于安装在所述底盘(1)上的固定板(411),以及结合于所述固定板(411)、位于所述横梁(31)宽度方向的两侧的两个限位柱(413),所述两个限位柱(413)之间的间距大于所述横梁(31)的宽度。
7.根据权利要求1所述的用于机器人的前轮组件,其特征在于,所述减震结构(4)包括两个所述弹簧(423),分别设于所述横梁(31)沿其宽度方向的两侧。
8.根据权利要求1所述的用于机器人的前轮组件,其特征在于,所述前轮组件还包括用于将所述横梁(31)安装在所述底盘(1)上的固定组件(34),
9.一种机器人,包括用于移动的车体(100),所述车体(100)包括底盘(1),以及安装于所述底盘(1)上的后轮组件,其特征在于,所述车体(100)还包括权利要求1至8任一项所述的前轮组件,所述前轮组件安装于所述底盘(1)上。
10.一种割草机器人,其特征在于,其为权利要求9所述的机器人,所述机器人还包括安装在所述车体(100)上、用于割草的工作机构(200)。
技术总结
本技术涉及一种用于机器人的前轮组件、机器人和割草机器人,其中前轮组件包括两个车轮、供两个车路安装的横梁、穿设于所述横梁上以令所述横梁绕其转动的横梁转轴,以及设于横梁转轴两侧的两个减震结构,减震结构包括一端可与底盘连接,另一端与横梁连接的弹簧,其用于与横梁配合,在所述车轮遇障时压缩以及在所述车轮过坑时伸长。本前轮组件装于机器人上后有效确保机器人在越障、过坑时保持抓地。
技术研发人员:祝锦程,贺海军,钟学森,朱建,康剑杰
受保护的技术使用者:深圳拓邦股份有限公司
技术研发日:20230927
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!