一种无人驾驶运输装置的制作方法
本技术涉及无人驾驶,特别涉及一种无人驾驶运输装置。
背景技术:
1、现有专利(公告号:cn113799892b)公开了一种无人驾驶运输装置,该实用新型通过设置检测部,根据检测部所实时检测到的无人车的倾斜程度,来控制调节部对后轮位置进行调节,从而防止装满物品的小车倾倒,并通过在距离传感器上设置驱动部,当无人车倾斜时,利用驱动部,来调节距离传感器的角度,从而使其达到更好的检测效果,但是实际上,距离传感器所具有的路障检测效果十分有限,并不能完全有效对路面上的障碍进行检测,且需要在无人车倾斜时,对距离传感器的角度进行调节,实际上车辆保持悬空倾斜状态的时间很短,对距离传感器进行调节的操作并不符合实际情况,这种调节并无明显作用。为此,我们提出了一种无人驾驶运输装置。
技术实现思路
1、为了解决上述问题,本实用新型提供一种无人驾驶运输装置。
2、为实现上述目的,本实用新型提供如下技术方案:
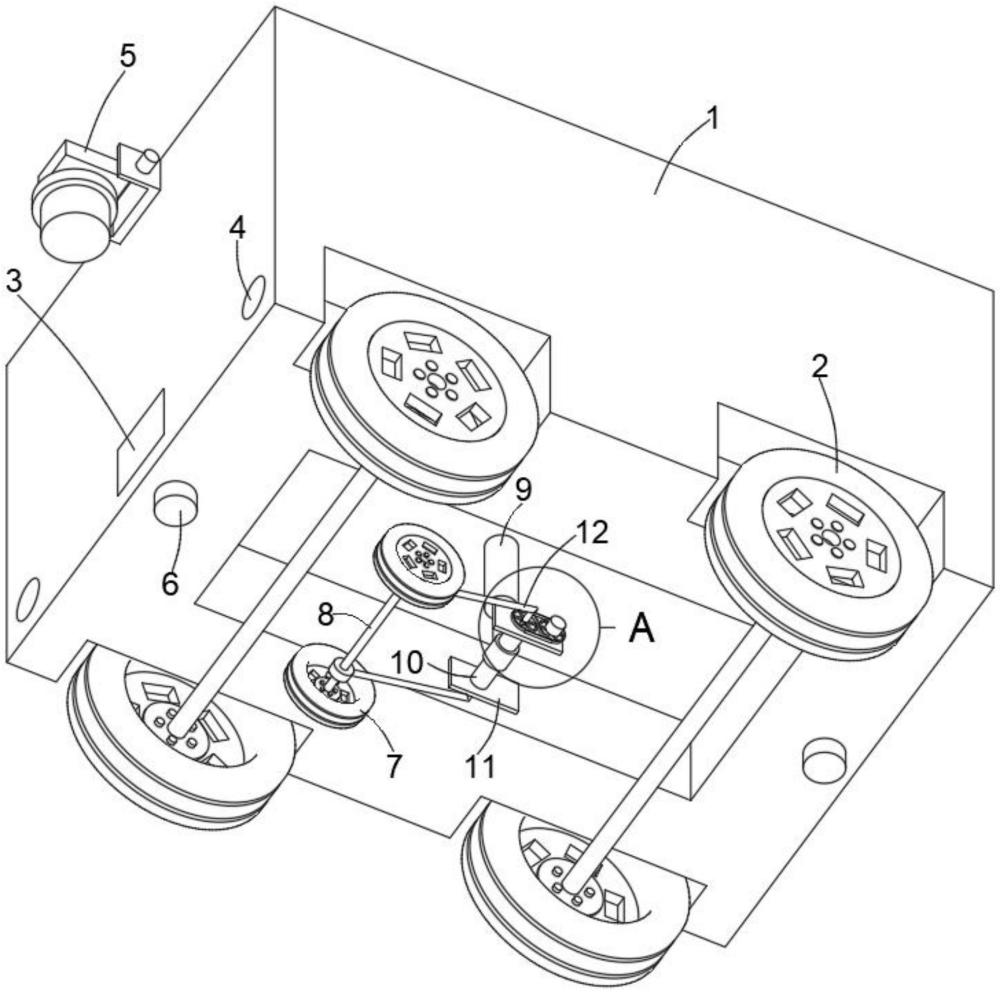
3、设计一种无人驾驶运输装置,包括底部安装有车轮的车体,所述车体上设有机器视觉系统,所述机器视觉系统包括安装于车体头部中间的摄像头,所述摄像头两侧设有车灯,摄像头上方设有可调照明装置,所述车体底部两端安装有垂直向下的测距传感器,所述车体前后车轮之间设有一对支撑轮,所述支撑轮之间安装有连接杆,所述车体底部固定有行程端向下的电动推杆,所述电动推杆行程端固定有支撑杆,所述支撑杆端部通过连接臂与连接杆转动连接,支撑杆端部设有与连接臂传动连接的电机二。
4、上述方案中,所述可调照明装置包括固定于车体上的连接座,所述连接座内通过转轴连接有连接块,所述连接块底部固定有向下的照明灯,且连接块与安装于连接座上的电机一传动连接。
5、上述方案中,所述转轴一端安装有齿轮二,所述齿轮二侧部啮合有安装于电机一输出轴上的齿轮一。
6、上述方案中,所述支撑杆端部固定有安装板,所述连接臂顶端贯穿安装板与支撑杆端部转动连接,所述电机二固定于安装板上,且电机二输出轴与连接臂上均安装有皮带轮,所述皮带轮之间通过皮带连接。
7、本实用新型的优点和有益效果在于:通过在车体头部设置摄像头、可调照明装置、车灯,利用车灯,为正常行驶的车体提供照明,以便摄像头对前方路况进行拍摄,结合机器视觉系统,对路面进行分析,有效检测路障,并配合可调照明装置,对处于倾斜状态的车体,提供充足的朝向路面的照明,以便摄像头清晰拍摄路面,通过在车体底部两端设置测距传感器,当车体倾斜时,利用测距传感器测量得到的距离值、相邻测距传感器之间的距离值以及正常状态下测距传感器所测得的距离值,通过计算可得车体的倾斜角度,无需对测距传感器进行角度调整,即可获取到车体倾斜角,为可调照明装置的角度调节提供数据支持,通过设置支撑轮、电动推杆、电机二、连接臂、支撑杆,利用得到的车体倾角以及测距传感器的距离值,来控制电动推杆的伸缩长度以及电机二输出轴的转动角度,在车体未落地前,使支撑轮代替车体一端的车轮对车体进行支撑,防止满载的车体在落地时发生侧翻,从而保证车体的稳定。
技术特征:
1.一种无人驾驶运输装置,包括底部安装有车轮(2)的车体(1),其特征在于,所述车体(1)上设有机器视觉系统,所述机器视觉系统包括安装于车体(1)头部中间的摄像头(3),所述摄像头(3)两侧设有车灯(4),摄像头(3)上方设有可调照明装置(5),所述车体(1)底部两端安装有垂直向下的测距传感器(6),所述车体(1)前后车轮(2)之间设有一对支撑轮(7),所述支撑轮(7)之间安装有连接杆(8),所述车体(1)底部固定有行程端向下的电动推杆(9),所述电动推杆(9)行程端固定有支撑杆(10),所述支撑杆(10)端部通过连接臂(12)与连接杆(8)转动连接,支撑杆(10)端部设有与连接臂(12)传动连接的电机二(13)。
2.根据权利要求1所述的一种无人驾驶运输装置,其特征在于,所述可调照明装置(5)包括固定于车体(1)上的连接座(51),所述连接座(51)内通过转轴(56)连接有连接块(52),所述连接块(52)底部固定有向下的照明灯(53),且连接块(52)与安装于连接座(51)上的电机一(54)传动连接。
3.根据权利要求2所述的一种无人驾驶运输装置,其特征在于,所述转轴(56)一端安装有齿轮二(57),所述齿轮二(57)侧部啮合有安装于电机一(54)输出轴上的齿轮一(55)。
4.根据权利要求1所述的一种无人驾驶运输装置,其特征在于,所述支撑杆(10)端部固定有安装板(11),所述连接臂(12)顶端贯穿安装板(11)与支撑杆(10)端部转动连接,所述电机二(13)固定于安装板(11)上,且电机二(13)输出轴与连接臂(12)上均安装有皮带轮(14),所述皮带轮(14)之间通过皮带连接。
技术总结
本技术公开了一种无人驾驶运输装置,包括底部安装有车轮的车体,所述车体上设有机器视觉系统,所述机器视觉系统包括摄像头,所述摄像头两侧设有车灯,摄像头上方设有可调照明装置,所述车体底部安装有测距传感器,所述车体前后车轮之间设有一对支撑轮,所述支撑轮之间安装有连接杆,所述车体底部固定有电动推杆,所述电动推杆行程端固定有支撑杆,所述支撑杆通过连接臂与连接杆转动连接,支撑杆端部设有与连接臂传动连接的电机二。本技术中,通过设置摄像头、可调照明装置、车灯,结合机器视觉系统,有效检测路障,通过设置支撑轮、电动推杆、电机二、连接臂、支撑杆,利用支撑轮,对车体进行支撑,防止车体发生侧翻。
技术研发人员:陈光明
受保护的技术使用者:上海瑞昱汽车有限公司
技术研发日:20231023
技术公布日:2024/6/18
- 还没有人留言评论。精彩留言会获得点赞!