一种无人驾驶轮式侦查巡逻车的制作方法
本技术涉及巡逻车,尤其涉及一种无人驾驶轮式侦查巡逻车。
背景技术:
1、巡逻车是一种特殊用途的汽车,通常由警察、安全人员、边境巡逻人员、军队或其他执法机构使用,为了能够协助工作人员,完成指定任务,在执行巡逻和侦查任务而无需人类直接操控,于是,我们就需要一种无人驾驶轮式侦查巡逻车。
2、经检索,专利号为“cn216805650u”的实用新型提供了“一种无人驾驶巡逻车,涉及巡逻车领域,包括巡逻车本体、毫米波探测组件、超声波探测组件和用于调整所述超声波探测组件位置的调节组件,所述毫米波探测组件设于所述巡逻车本体外部,所述超声波探测组件通过所述调节组件活动设于所述巡逻车本体外部,本实用新型解决了现有无人驾驶巡逻车依靠红外传感器和前置摄像头的组合无法精确识别温度相同的物体,影响巡逻效果的问题,以及现有的无人驾驶巡逻车的红外传感器位置固定,无法根据实际巡逻的场景进行调整,适用性较差的问题”。但是该装置在使用时,若需要对其他方位进行监测时,需要改变巡逻车整体的工作位置,会消耗较多的动力源,导致巡逻车使用时间降低,并且该装置摄像头升降距离有限,需要将巡逻车移动至较高区域。
3、于是,我们提供了一种无人驾驶轮式侦查巡逻车。
技术实现思路
1、本实用新型的目的在于提供一种无人驾驶轮式侦查巡逻车,解决上述背景技术中提出的问题。
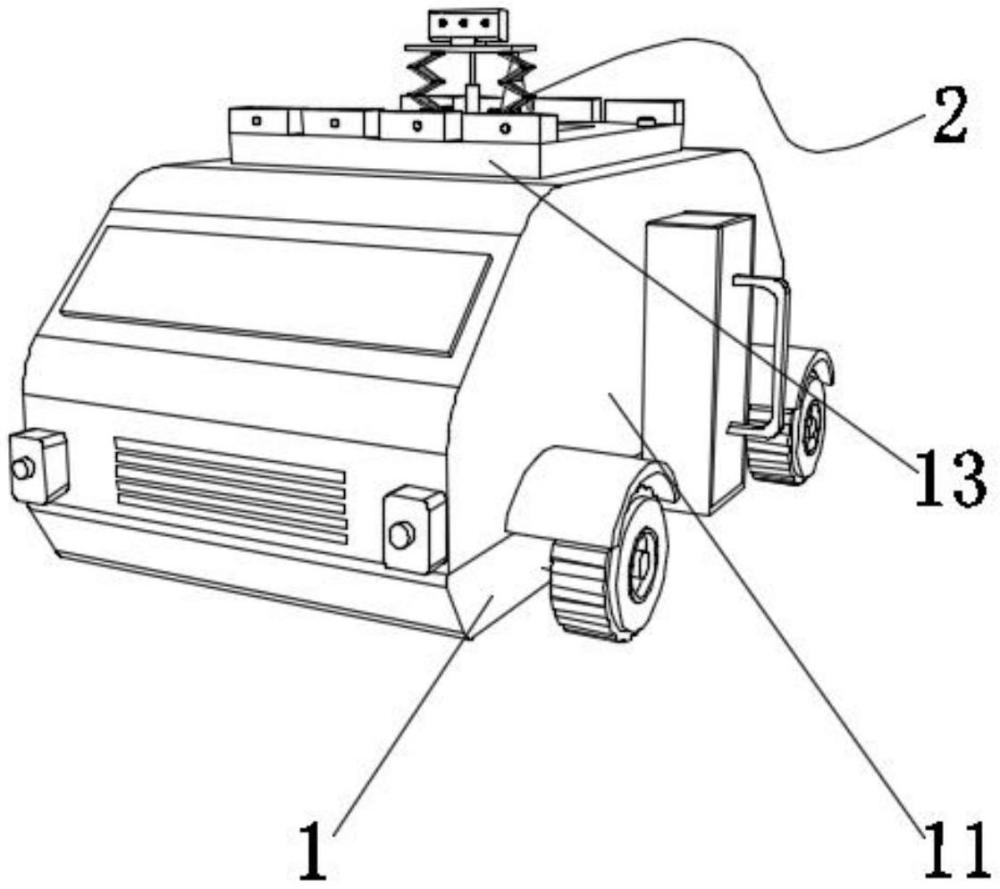
2、为实现上述目的,本实用新型提供如下技术方案:一种无人驾驶轮式侦查巡逻车,包括底壳和固定机构,所述底壳的上端安装有驾驶仓,所述驾驶仓的两侧均固定安装有移动座,所述驾驶仓的顶端安装有连接块,所述连接块的中心处两侧均开设有滑槽,所述滑槽的内部安装有固定机构;
3、所述固定机构包括滑板、移动件和顶板,所述滑槽的内部滑动安装有滑板,所述滑板的上端安装有移动件,所述移动件的顶端安装有顶板。
4、优选的,所述滑板的一侧两端均安装有主推杆,且所述连接块与主推杆之间为固定连接,所述滑板的表面螺栓连接有主电机。
5、优选的,所述移动件包括连接板、固定块和支架,所述主电机的上端安装有连接板,所述连接板的表面焊接有固定块,所述固定块的内侧转动安装有支架。
6、优选的,所述支架与顶板之间转动连接,所述顶板的上端安装有高分辨率摄像头,所述顶板的底端固定安装有副推杆,且所述连接板与副推杆的另一端之间为固定连接。
7、优选的,所述底壳的的两侧均固定安装有外壳,所述外壳的表面滑动安装有挡板。
8、优选的,所述外壳的内部安装有传动件,所述传动件包括副电机、主锥齿轮、副锥齿轮和螺纹杆,所述外壳的一端螺栓连接有副电机,所述副电机的另一端通过轴固定安装有主锥齿轮,所述主锥齿轮的上端啮合有副锥齿轮,所述副锥齿轮的顶端固定安装有螺纹杆,且所述移动座与螺纹杆之间为螺纹连接。
9、优选的,所述外壳的一端安装有导向件,所述外壳的一端安装有滑仓,且所述底壳与滑仓之间为焊接,所述滑仓的内部滑动连接有滑块,且所述驾驶仓与滑块之间为焊接。
10、与现有技术相比,本实用新型的有益效果是:
11、1、该无人驾驶轮式侦查巡逻车,通过固定机构的设置,当需要对其他方向进行侦察时,控制主电机开始工作,主电机带动连接板转动,达到了调整旋转角度的目的,主电机能够改变连接板的方向,连接板提供了连接,当需要侦察较近的事物时,不需要改变整体的工作位置,控制主推杆开始工作,主推杆推动滑板在滑槽的内部滑动,达到了调节距离的目的,主推杆能够改变滑板的横向距离,滑板提供了支撑,滑槽使得滑板按规定路径移动,当需要调节高度时,控制副推杆开始工作,副推杆带动支架移动,将高分辨率摄像头顶升至上方,副推杆能够推动高分辨率摄像头上升,支架辅助了副推杆移动,该装置的设计,在侦察过程中,若需要对其他方向或高度进行侦察时,不需要改变整体工作位置,能够减少动力源消耗,延长使用时间。
12、2、通过外壳、传动件与滑仓的设置,当需要对较高的事物进行观察时,控制副电机开始工作,副电机带动主锥齿轮与副锥齿轮啮合转动,此时螺纹杆转动,驾驶仓跟随移动座匀速上升的同时,滑块在滑仓的内部滑动,滑块规定了移动座的移动路径,滑仓为滑块提供了运动导向,副电机能够控制主锥齿轮转动,当主锥齿轮转动,副锥齿轮能够带动螺纹杆,螺纹杆转动时移动座匀速上升,当需要侦察较高高度时,通过传动件的设计,不需要将巡逻车移动较高的位置,就能够对周围较高的事物实施监测。
技术特征:
1.一种无人驾驶轮式侦查巡逻车,包括底壳(1)和固定机构(2),其特征在于:所述底壳(1)的上端安装有驾驶仓(11),所述驾驶仓(11)的两侧均固定安装有移动座(12),所述驾驶仓(11)的顶端安装有连接块(13),所述连接块(13)的中心处两侧均开设有滑槽(14),所述滑槽(14)的内部安装有固定机构(2);
2.根据权利要求1所述的一种无人驾驶轮式侦查巡逻车,其特征在于,所述滑板(21)的一侧两端均安装有主推杆(211),且所述连接块(13)与主推杆(211)之间为固定连接,所述滑板(21)的表面螺栓连接有主电机(212)。
3.根据权利要求2所述的一种无人驾驶轮式侦查巡逻车,其特征在于,所述移动件(22)包括连接板(221)、固定块(222)和支架(223),所述主电机(212)的上端安装有连接板(221),所述连接板(221)的表面焊接有固定块(222),所述固定块(222)的内侧转动安装有支架(223)。
4.根据权利要求3所述的一种无人驾驶轮式侦查巡逻车,其特征在于,所述支架(223)与顶板(23)之间转动连接,所述顶板(23)的上端安装有高分辨率摄像头(231),所述顶板(23)的底端固定安装有副推杆(232),且所述连接板(221)与副推杆(232)的另一端之间为固定连接。
5.根据权利要求1所述的一种无人驾驶轮式侦查巡逻车,其特征在于,所述底壳(1)的两侧均固定安装有外壳(31),所述外壳(31)的表面滑动安装有挡板(32)。
6.根据权利要求5所述的一种无人驾驶轮式侦查巡逻车,其特征在于,所述外壳(31)的内部安装有传动件(4),所述传动件(4)包括副电机(41)、主锥齿轮(42)、副锥齿轮(43)和螺纹杆(44),所述外壳(31)的一端螺栓连接有副电机(41),所述副电机(41)的另一端通过轴固定安装有主锥齿轮(42),所述主锥齿轮(42)的上端啮合有副锥齿轮(43),所述副锥齿轮(43)的顶端固定安装有螺纹杆(44),且所述移动座(12)与螺纹杆(44)之间为螺纹连接。
7.根据权利要求5所述的一种无人驾驶轮式侦查巡逻车,其特征在于,所述外壳(31)的一端安装有导向件(5),所述外壳(31)的一端安装有滑仓(51),且所述底壳(1)与滑仓(51)之间为焊接,所述滑仓(51)的内部滑动连接有滑块(52),且所述驾驶仓(11)与滑块(52)之间为焊接。
技术总结
本技术提供一种无人驾驶轮式侦查巡逻车,涉及巡逻车技术领域,包括底壳和固定机构,所述底壳的上端安装有驾驶仓,所述驾驶仓的两侧均固定安装有移动座。该无人驾驶轮式侦查巡逻车,通过固定机构的设置,当需要对其他方向进行侦察时,控制主电机开始工作,主电机带动连接板转动,达到了调整旋转角度的目的,该装置的设计在侦察过程中,若需要对其他方向或高度进行侦察时,不需要改变整体工作位置,能够减少动力源消耗延长使用时间,当需要对较高的事物进行观察时,控制副电机开始工作,副电机带动主锥齿轮与副锥齿轮啮合转动,通过传动件的设计,不需要将巡逻车移动较高的位置,就能够对周围较高的事物实施监测。
技术研发人员:陈官平,俞静峰,刘虎仁,蔡佰成,胡敏,邓隆林,黄台明
受保护的技术使用者:泉州市云箭测控与感知技术创新研究院
技术研发日:20231107
技术公布日:2024/10/17
- 还没有人留言评论。精彩留言会获得点赞!