一种自动清扫车的人工接管控制机构的制作方法
本技术涉及控制机构,更具体为一种自动清扫车的人工接管控制机构。
背景技术:
1、当自动清扫车的自动驾驶系统无法适应当前驾驶条件,人工接入操作复杂,存在一定的危险性。因此,需要提供一种新的技术方案给予解决。
技术实现思路
1、本实用新型的目的在于提供一种自动清扫车的人工接管控制机构,解决了当自动清扫车的自动驾驶系统无法适应当前驾驶条件,人工接入操作复杂,存在一定的危险性的问题。
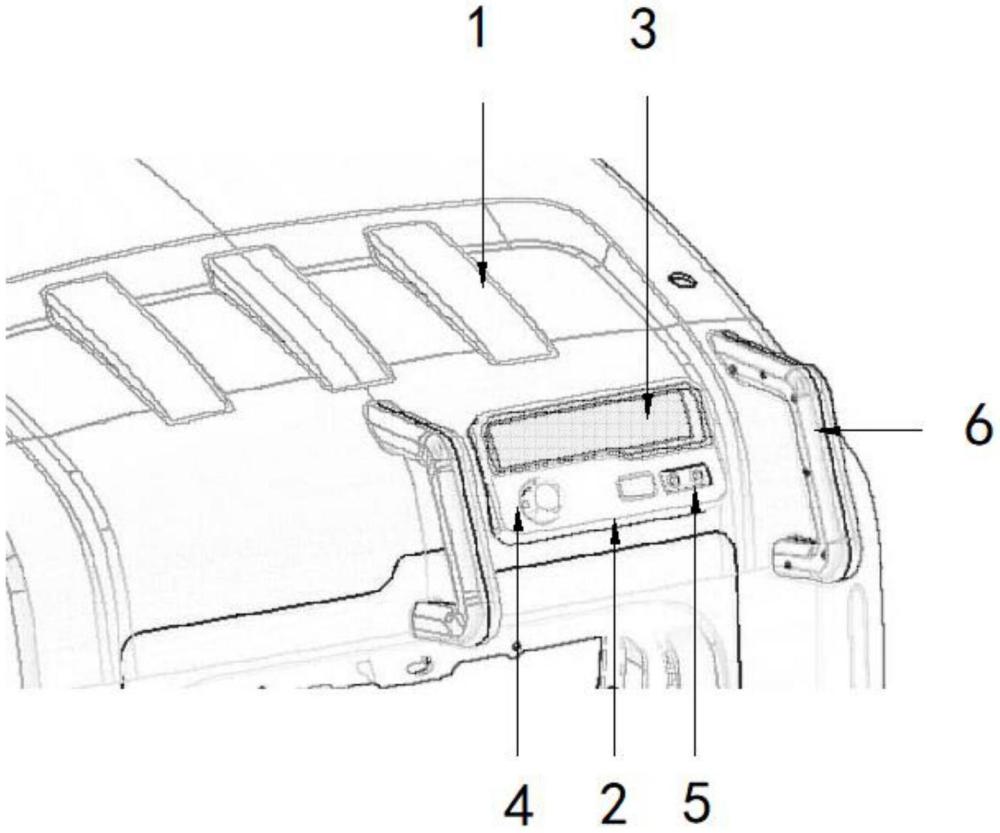
2、为实现上述目的,本实用新型提供如下技术方案:一种自动清扫车的人工接管控制机构,包括:车体,所述车体的表面设置有交互装置且交互装置通过螺栓与车体之间固定连接,所述交互装置的两侧均设置有握把且握把通过螺栓与车体之间固定连接,所述握把包括第一壳体和第二壳体且第一壳体的内部设置有控制器,所述控制器与交互装置之间无线连接,所述第一壳体的内部设置有转动轴且转动轴的表面设置有扳机,所述扳机通过转动轴与第一壳体和第二壳体之间转动连接。
3、作为本实用新型的一种优选实施方式,所述交互装置的表面设置有显示屏且显示屏的下部设置有控制按钮。
4、作为本实用新型的一种优选实施方式,所述交互装置的表面设置有接口且接口与交互装置的内部电路电性连接。
5、作为本实用新型的一种优选实施方式,所述第一壳体和第二壳体的内部均设置有安装孔且第一壳体和第二壳体通过固定螺栓贯穿安装孔进行固定。
6、与现有技术相比,本实用新型的有益效果如下:
7、本实用新型提供左右各一个扳机形态的握把机构,集成一个可以在强光下仍然能正常显示的长条形状态屏,并提供车辆档位控制旋钮,业务操作按钮;用户按下左扳机时车辆执行左转动作,用户按下右扳机时车辆执行右转动作,同时按下左右两个扳机是车辆执行暂停功能;现场人员需要人工接管时操作简单便捷;用户可以通过按下把手两侧的扳机来增加车辆的速度,松开扳机则减速或停止车辆,这种控制方式类似于电动工具或游戏手柄上的扳机控制器,扳机控制器可以实现灵活的速度控制,根据扳机的按下程度来调整车辆的速度,通过算法标定结合左右两边扳机按下程度的不同来实现方向调节,让方向控制更符合操作者的感官体验,这种控制方式可以提供更精确的速度调节和更符合感官体验的方向控制,使驾驶体验更加舒适和可控直观的操作方式:这种操作方式可以提高驾驶的便利性和灵活性,并减少疲劳感,当车辆切换到人工接管模式时,车辆的aeb系统也会随即切换成接管模式aeb,以确保在紧急情况下能够迅速停车。
技术特征:
1.一种自动清扫车的人工接管控制机构,其特征在于:包括:车体(1),所述车体(1)的表面设置有交互装置(2)且交互装置(2)通过螺栓与车体(1)之间固定连接,所述交互装置(2)的两侧均设置有握把(6)且握把(6)通过螺栓与车体(1)之间固定连接,所述握把(6)包括第一壳体(7)和第二壳体(12)且第一壳体(7)的内部设置有控制器(10),所述控制器(10)与交互装置(2)之间无线连接,所述第一壳体(7)的内部设置有转动轴(9)且转动轴(9)的表面设置有扳机(11),所述扳机(11)通过转动轴(9)与第一壳体(7)和第二壳体(12)之间转动连接。
2.根据权利要求1所述的一种自动清扫车的人工接管控制机构,其特征在于:所述交互装置(2)的表面设置有显示屏(3)且显示屏(3)的下部设置有控制按钮(4)。
3.根据权利要求1所述的一种自动清扫车的人工接管控制机构,其特征在于:所述交互装置(2)的表面设置有接口(5)且接口(5)与交互装置(2)的内部电路电性连接。
4.根据权利要求1所述的一种自动清扫车的人工接管控制机构,其特征在于:所述第一壳体(7)和第二壳体(12)的内部均设置有安装孔(8)且第一壳体(7)和第二壳体(12)通过固定螺栓贯穿安装孔(8)进行固定。
技术总结
本技术公开了一种自动清扫车的人工接管控制机构,包括:车体,所述车体的表面设置有交互装置且交互装置通过螺栓与车体之间固定连接,所述交互装置的两侧均设置有握把且握把通过螺栓与车体之间固定连接,所述握把包括第一壳体和第二壳体且第一壳体的内部设置有控制器,所述控制器与交互装置之间无线连接。本技术提供左右各一个扳机形态的握把机构,集成一个可以在强光下仍然能正常显示的长条形状态屏,并提供车辆档位控制旋钮,业务操作按钮;用户按下左扳机时车辆执行左转动作,用户按下右扳机时车辆执行右转动作,同时按下左右两个扳机是车辆执行暂停功能;现场人员需要人工接管时操作简单便捷。
技术研发人员:周鑫
受保护的技术使用者:杭州有鹿智能科技有限公司
技术研发日:20231110
技术公布日:2024/9/9
- 还没有人留言评论。精彩留言会获得点赞!