传感器清洗装置、传感器清洗方法和传感器清洗程序与流程
本公开涉及一种传感器清洗装置、传感器清洗方法和传感器清洗程序。相关申请的援引本申请是基于2022年5月13日申请的日本专利申请2022-079684号完成的,主张其优先权,该专利申请的全部内容将通过援引载入本说明书中。
背景技术:
1、在车辆的自动驾驶中,基于由相机等拍摄装置获取的车辆周围的图像信息和由lidar等激光在车辆周围扫描而得到的车辆外界的信息,执行车辆的加减速、转弯和制动等的控制。
2、因此,在拍摄装置和lidar等传感器中,在与车辆外界的信息获取相关的所谓感测面被污染时,难以准确地获取车辆外界的信息。如果是拍摄装置,则感测面是拍摄透镜或保护拍摄透镜的透明玻璃,如果是lidar,则感测面是将激光照射到外界的发光部和接收在外界反射来的激光的受光部。
3、在日本专利特开2019-162915号公报中提出了一种利用高压空气或清洗液来清洗识别车辆的周围状况的识别传感器的发明。
技术实现思路
1、发明所要解决的技术问题
2、在清洗识别传感器的过程中,难以从清洗中的识别传感器获取车辆外界的信息,但是在日本专利特开2019-162915号公报所公开的发明中,在由车辆所包括的多个识别传感器中的其他识别传感器识别出与作为清洗对象的识别传感器相同的识别物体的情况下,清洗作为清洗对象的识别传感器。但是,在使用了高压空气的空气清洗的情况下,识别传感器的识别性能不会降低,因此,在由其他识别传感器识别出与作为清洗对象的识别传感器相同的识别物体的情况下,不特别需要对作为清洗对象的识别传感器进行清洗的判断。
3、另外,在日本专利特开2019-162915号公报所公开的发明中,在实施利用清洗液来清洗感测面的液体清洗时,为了不将清洗液误判定为污垢,需要向检测感测面的污垢的控制装置通知“液体清洗中”,但是由于不进行该通知,因此,有可能会将附着于感测面的清洗液误判定为污垢。
4、本公开是鉴于上述技术问题而创作的,其目的在于得到一种能够准确地分开使用空气清洗和液体清洗,并且抑制液体清洗对自动驾驶的影响的传感器清洗装置、传感器清洗方法和传感器清洗程序。
5、解决技术问题所采用的技术方案
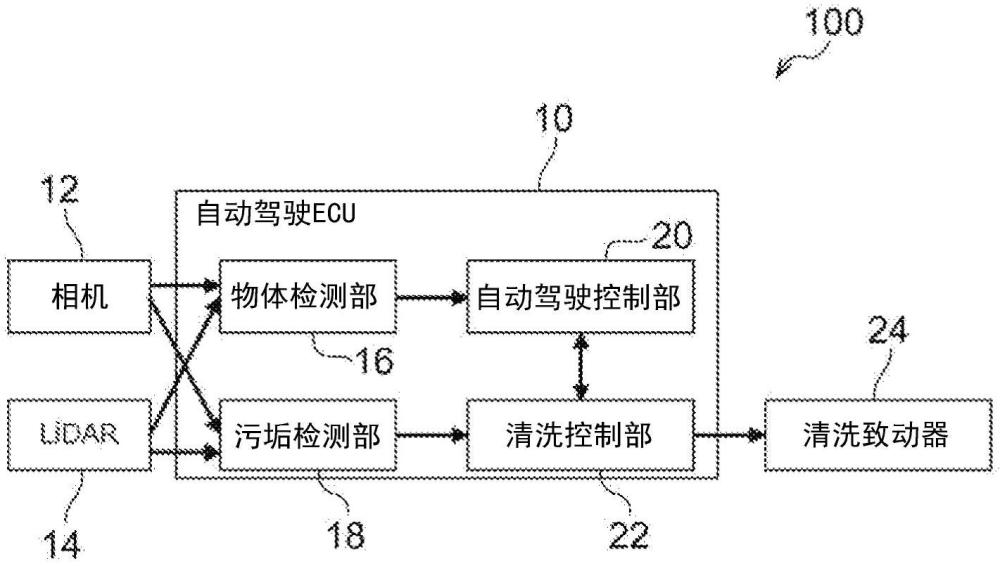
6、为了达成上述目的,本公开的传感器清洗装置包括:物体检测部(16),上述物体检测部根据由监测车辆(300)周边的多个传感器(12a~12d、14a~14d)获取的信息来检测上述车辆(300)周边的物体;污垢检测部(18),上述污垢检测部对上述传感器(12a~12d、14a~14d)的污垢进行检测;清洗控制部(22),上述清洗控制部持续进行向上述传感器(12a~12d、14a~14d)喷射高压空气的空气清洗规定的空气清洗时间;以及自动驾驶控制部(20),上述自动驾驶控制部使用由上述物体检测部(16)检测出的上述物体的信息来控制上述车辆的自动驾驶,并且在上述污垢检测部检测出上述传感器(12a~12d、14a~14d)的污垢且判断为能够利用清洗液进行清洗的情况下,向上述清洗控制部(22)输出利用清洗液来清洗上述传感器(12a~12d、14a~14d)的指令,上述清洗控制部(22)按照上述指令来控制液体清洗致动器(24a~24h),以向上述传感器(12a~12d、14a~14d)喷射上述清洗液并进行清洗,并且向上述自动驾驶控制部(20)通知处于利用上述清洗液来清洗上述传感器(12a~12d、14a~14d)的清洗中。
7、通过这样地构成,能够得到可以准确地分开使用空气清洗和液体清洗,并且能够抑制液体清洗对自动驾驶的影响的传感器清洗装置、传感器清洗方法和传感器清洗程序。
技术特征:
1.一种传感器清洗装置,包括:
2.如权利要求1所述的传感器清洗装置,其特征在于,
3.如权利要求1所述的传感器清洗装置,其特征在于,
4.如权利要求1至3中任一项所述的传感器清洗装置,其特征在于,
5.如权利要求4所述的传感器清洗装置,其特征在于,
6.如权利要求4所述的传感器清洗装置,其特征在于,
7.如权利要求6所述的传感器清洗装置,其特征在于,
8.如权利要求1所述的传感器清洗装置,其特征在于,
9.如权利要求1所述的传感器清洗装置,其特征在于,
10.一种传感器清洗方法,所述传感器清洗方法包括:
11.一种传感器清洗程序,
技术总结
自动驾驶控制部(20)使用由物体检测部(16)检测出的物体的信息来控制车辆的自动驾驶,并且污垢检测部(18)对作为传感器的相机(12)或L i DAR(14)各自的感测面的污垢进行检测,并且在判断为能够利用清洗液进行清洗的情况下,向清洗控制部(22)输出利用清洗液来清洗相机(12)或L i DAR(14)的指令。清洗控制部(22)按照该指令来控制清洗致动器(24),以向相机(12)或L i DAR(14)的感测面喷射清洗液并进行清洗,并且向自动驾驶控制部(20)通知处于利用清洗液来清洗相机(12)或L i DAR(14)的感测面的清洗中。
技术研发人员:足立尚太
受保护的技术使用者:株式会社电装
技术研发日:
技术公布日:2025/1/6
- 还没有人留言评论。精彩留言会获得点赞!