一种车辆无人驾驶制动系统的制作方法
本发明涉及车辆制动,具体而言,涉及一种车辆无人驾驶制动系统。
背景技术:
1、矿用宽体车用于矿山或采矿环境中的车辆,通常具有宽大的车身和强大的动力系统,能够在恶劣的路况和工作环境下进行运输和搬运工作。这种类型的车辆因为用于运输矿石、矿砂和其他采矿材料,因此具有较大的载重能力和适应不同地形的能力。
2、现有矿用宽体车多为驾驶员驾驶,虽然矿用宽体车通常具有防护结构,确保车辆和驾驶员在矿山中的安全,以使车辆高效地运输物料。但是当矿山中发生土石坍塌等严重事故时,矿用宽体车的防护结构对人员的保护作用有限,仍会造成驾驶员伤亡。因此,如何实现矿用宽体车的无人驾驶控制是亟需解决的一个技术问题。
技术实现思路
1、本发明所要解决的问题是如何实现矿用宽体车的无人驾驶控制。
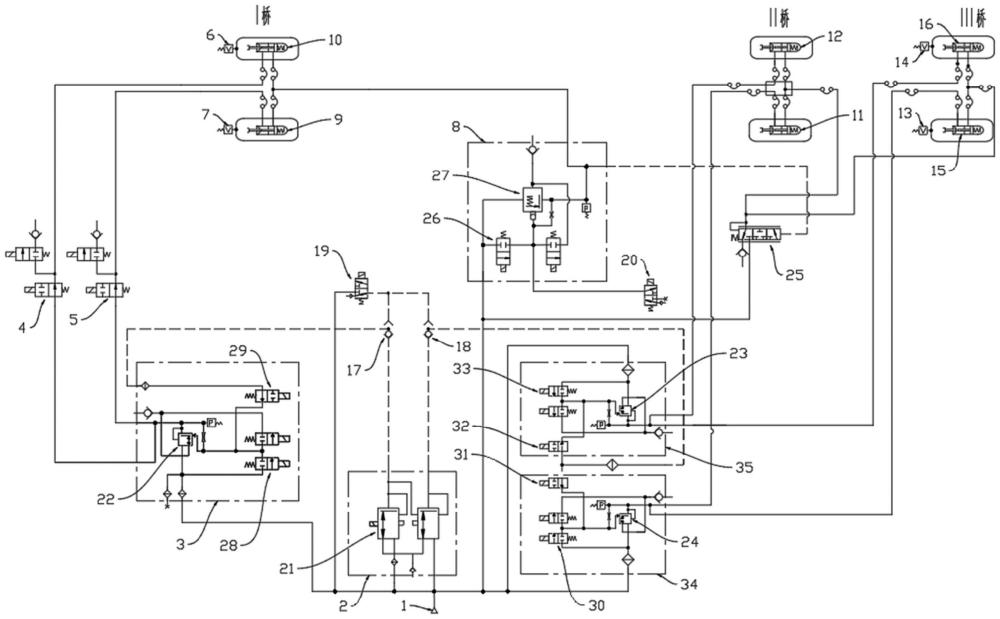
2、为解决上述问题,本发明提供了一种车辆无人驾驶制动系统,包括气源、第一控制模块、电磁阀组和第二控制模块,所述第二控制模块包括两个控制单元;所述第一控制模块的进气口和两个所述控制单元的进气口均与所述气源相连通,所述第一控制模块的出气口与所述电磁阀组的进气口相连,所述电磁阀组的出气口用于分别与车辆i桥的两个制动器的前腔相连,一个所述控制单元的出气口用于分别与车辆ii桥一侧的制动器的前腔和车辆iii桥同一侧的制动器的前腔相连,另一个所述控制单元的出气口用于分别与车辆ii桥另一侧的制动器的前腔和车辆iii桥同一侧的制动器的前腔相连。
3、可选地,所述第一控制模块包括第二电磁换向阀和第二减压阀,所述第二电磁换向阀的进气口与所述气源相连通,所述第二电磁换向阀的出气口与所述第二减压阀的控制端相连,所述第二减压阀的进气口与所述气源相连通,所述第二减压阀的出气口与所述电磁阀组的进气口相连。
4、可选地,所述电磁阀组包括第一电磁阀和第二电磁阀,所述第二减压阀的出气口分别与所述第一电磁阀的进气口和所述第二电磁阀的进气口相连,所述第一电磁阀的出气口用于与所述车辆i桥的一个所述制动器的所述前腔相连,所述第二电磁阀的出气口用于与所述车辆i桥的另一个所述制动器的所述前腔相连。
5、可选地,所述控制单元包括第一制动电磁换向阀和制动减压阀,所述第一制动电磁换向阀的进气口与所述气源相连通,所述第一制动电磁换向阀的出气口与所述制动减压阀的控制端相连,所述制动减压阀的进气口与所述气源相连通,所述制动减压阀的出气口用于分别与所述车辆ii桥一侧的所述制动器的所述前腔和所述车辆iii桥同一侧的所述制动器的所述前腔相连。
6、可选地,所述车辆无人驾驶制动系统还包括驻车模块和继动阀,所述驻车模块的进气口与所述气源相连通,所述驻车模块的出气口分别与所述车辆i桥的两个所述制动器的后腔和所述继动阀的控制端相连,所述继动阀的第一进气口与所述气源相连通,所述继动阀的出气口分别与所述车辆ii桥的两个所述制动器的后腔和所述车辆iii桥的两个所述制动器的后腔相连。
7、可选地,所述驻车模块包括第一电磁换向阀和第五减压阀,所述第一电磁换向阀的进气口与所述气源相连通,所述第一电磁换向阀的出气口与所述第五减压阀的控制端相连,所述第五减压阀的进气口与所述气源相连通,所述第五减压阀的出气口分别与所述车辆i桥的两个所述制动器的后腔和所述继动阀的控制端相连。
8、可选地,所述车辆无人驾驶制动系统还包括行走冗余电磁阀、前桥单向阀和第三电磁换向阀,所述行走冗余电磁阀的第一进气口与所述气源相连通,所述行走冗余电磁阀的出气口与所述前桥单向阀的第一进气口相连,所述前桥单向阀的出气口与所述第三电磁换向阀的进气口相连,所述第三电磁换向阀的出气口与所述第二减压阀的控制端相连。
9、可选地,所述车辆无人驾驶制动系统还包括后桥单向阀,所述控制单元还包括第二制动电磁换向阀,所述后桥单向阀的第一进气口与所述行走冗余电磁阀的出气口相连,所述后桥单向阀的出气口分别与两个所述控制单元中的第二制动电磁换向阀的进气口相连,所述第二制动电磁换向阀的出气口与所在所述控制单元中的所述制动减压阀的控制端相连。
10、可选地,所述车辆无人驾驶制动系统还包括驻车电磁阀,所述驻车电磁阀的进气口分别与所述第一电磁换向阀的出气口和所述第五减压阀的出气口相连通,所述驻车电磁阀的第一出气口封堵,所述驻车电磁阀的第二出气口上安装有单向阀,所述继动阀的第二进气口上安装有另一个单向阀。
11、可选地,所述车辆无人驾驶制动系统还包括轮速传感器,所述轮速传感器分别用于检测所述车辆i桥的两个车轮的轮速和所述车辆iii桥的两个车轮的轮速。
12、与现有技术相比,本发明具有如下有益效果:
13、本发明提供的一种车辆无人驾驶制动系统,通过实时监测车辆的运行状态和运行速度,当需要车辆制动的时候,控制第一控制模块和两个控制单元中的一个或者多个导通,同时控制电磁阀组导通,气源通过电磁阀组向车辆i桥的两个制动器的前腔充入气体,使得i桥车辆行车制动;气源通过两个控制单元分别向车辆ii桥的两个制动器的前腔和车辆iii桥的两个制动器的前腔充入气体,使得ii桥和iii桥的车轮行车制动,实现无人驾驶下的远程控制制动,这样可以控制车辆在无人驾驶的情况下,在矿洞内行驶,即使矿洞内发生土石崩塌等严重事故,也不会造成人员伤亡。
技术特征:
1.一种车辆无人驾驶制动系统,其特征在于,包括:气源(1)、第一控制模块(3)、电磁阀组和第二控制模块,所述第二控制模块包括两个控制单元;所述第一控制模块(3)的进气口和两个所述控制单元的进气口均与所述气源(1)相连通,所述第一控制模块(3)的出气口与所述电磁阀组的进气口相连,所述电磁阀组的出气口用于分别与车辆i桥的两个制动器的前腔相连,一个所述控制单元的出气口用于分别与车辆ii桥一侧的制动器的前腔和车辆iii桥同一侧的制动器的前腔相连,另一个所述控制单元的出气口用于分别与车辆ii桥另一侧的制动器的前腔和车辆iii桥同一侧的制动器的前腔相连。
2.根据权利要求1所述的车辆无人驾驶制动系统,其特征在于,所述第一控制模块(3)包括第二电磁换向阀(28)和第二减压阀(22),所述第二电磁换向阀(28)的进气口与所述气源(1)相连通,所述第二电磁换向阀(28)的出气口与所述第二减压阀(22)的控制端相连,所述第二减压阀(22)的进气口与所述气源(1)相连通,所述第二减压阀(22)的出气口与所述电磁阀组的进气口相连。
3.根据权利要求2所述的车辆无人驾驶制动系统,其特征在于,所述电磁阀组包括第一电磁阀(4)和第二电磁阀(5),所述第二减压阀(22)的出气口分别与所述第一电磁阀(4)的进气口和所述第二电磁阀(5)的进气口相连,所述第一电磁阀(4)的出气口用于与所述车辆i桥的一个所述制动器的所述前腔相连,所述第二电磁阀(5)的出气口用于与所述车辆i桥的另一个所述制动器的所述前腔相连。
4.根据权利要求2所述的车辆无人驾驶制动系统,其特征在于,所述控制单元包括第一制动电磁换向阀和制动减压阀,所述第一制动电磁换向阀的进气口与所述气源(1)相连通,所述第一制动电磁换向阀的出气口与所述制动减压阀的控制端相连,所述制动减压阀的进气口与所述气源(1)相连通,所述制动减压阀的出气口用于分别与所述车辆ii桥一侧的所述制动器的所述前腔和所述车辆iii桥同一侧的所述制动器的所述前腔相连。
5.根据权利要求1所述的车辆无人驾驶制动系统,其特征在于,还包括驻车模块(8)和继动阀(25),所述驻车模块(8)的进气口与所述气源(1)相连通,所述驻车模块(8)的出气口分别与所述车辆i桥的两个所述制动器的后腔和所述继动阀(25)的控制端相连,所述继动阀(25)的第一进气口与所述气源(1)相连通,所述继动阀(25)的出气口分别与所述车辆ii桥的两个所述制动器的后腔和所述车辆iii桥的两个所述制动器的后腔相连。
6.根据权利要求5所述的车辆无人驾驶制动系统,其特征在于,所述驻车模块(8)包括第一电磁换向阀(26)和第五减压阀(27),所述第一电磁换向阀(26)的进气口与所述气源(1)相连通,所述第一电磁换向阀(26)的出气口与所述第五减压阀(27)的控制端相连,所述第五减压阀(27)的进气口与所述气源(1)相连通,所述第五减压阀(27)的出气口分别与所述车辆i桥的两个所述制动器的后腔和所述继动阀(25)的控制端相连。
7.根据权利要求4所述的车辆无人驾驶制动系统,其特征在于,还包括行走冗余电磁阀(19)、前桥单向阀(17)和第三电磁换向阀(29),所述行走冗余电磁阀(19)的第一进气口与所述气源(1)相连通,所述行走冗余电磁阀(19)的出气口与所述前桥单向阀(17)的第一进气口相连,所述前桥单向阀(17)的出气口与所述第三电磁换向阀(29)的进气口相连,所述第三电磁换向阀(29)的出气口与所述第二减压阀(22)的控制端相连。
8.根据权利要求7所述的车辆无人驾驶制动系统,其特征在于,还包括后桥单向阀(18),所述控制单元还包括第二制动电磁换向阀,所述后桥单向阀(18)的第一进气口与所述行走冗余电磁阀(19)的出气口相连,所述后桥单向阀(18)的出气口分别与两个所述控制单元中的第二制动电磁换向阀的进气口相连,所述第二制动电磁换向阀的出气口与所在所述控制单元中的所述制动减压阀的控制端相连。
9.根据权利要求6所述的车辆无人驾驶制动系统,其特征在于,还包括驻车电磁阀(20),所述驻车电磁阀(20)的进气口分别与所述第一电磁换向阀(26)的出气口和所述第五减压阀(27)的出气口相连通,所述驻车电磁阀(20)的第一出气口封堵,所述驻车电磁阀(20)的第二出气口上安装有单向阀,所述继动阀(25)的第二进气口上安装有另一个单向阀。
10.根据权利要求1-9任一项所述的车辆无人驾驶制动系统,其特征在于,还包括轮速传感器,所述轮速传感器分别用于检测所述车辆i桥的两个车轮的轮速和所述车辆iii桥的两个车轮的轮速。
技术总结
本发明提供了一种车辆无人驾驶制动系统,涉及车辆制动技术领域,包括气源、第一控制模块、电磁阀组和第二控制模块,第二控制模块包括两个控制单元;第一控制模块的进气口和两个控制单元的进气口均与气源相连通,第一控制模块的出气口与电磁阀组的进气口相连,电磁阀组的出气口用于分别与车辆I桥的两个制动器的前腔相连,一个控制单元的出气口用于分别与车辆II桥一侧的制动器的前腔和车辆III桥同一侧的制动器的前腔相连。控制第一控制模块、电磁阀组和两个控制单元导通,气源向制动器的前腔充入气体,实现无人驾驶下的远程制动,即使矿洞内发生土石崩塌等严重事故,也不会造成人员伤亡。
技术研发人员:胡雪兵,周娇,王泽康,张铁风,杨德清,杨楠,张文卓
受保护的技术使用者:航天重型工程装备有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!