控制器的制作方法
本公开涉及一种基于传感器的检测结果来控制车辆的控制器。
背景技术:
1、车辆配备有lidar、雷达等,它们是检测周围状况的传感器,并且车辆的控制器处理传感器的检测结果以检测车辆周围的对象,从而执行车辆的控制(例如,速度和转向控制)(参见例如日本未审查专利申请公开第2020-154983号)。
技术实现思路
1、技术问题
2、然而,当总是对传感器的检测结果执行相同的处理时,检测结果(例如,点云数据)中的噪声随着车辆的周围状况(例如,天气变化)的变化而增加,并且引起对车辆周围的对象的错误检测,并且因此可能无法适当地控制车辆。
3、本公开聚焦于这一点,并且其目的是考虑到传感器的错误检测来控制车辆。
4、技术方案
5、本公开的一个方面提供了一种控制器,包括:获取部,从第一传感器获取检测结果,第一传感器安装在车辆上并检测车辆周围的状况;处理部,对所获取的检测结果执行第一处理或与第一处理不同的第二处理;车辆控制部,基于处理部的处理结果来控制车辆;以及接收部,其接收车辆的驾驶员的与对检测结果的处理相关的操作,其中,当接收部接收到操作时,处理部在第一处理和第二处理之间切换。
6、第二处理可以是在对检测结果执行滤波之后执行第一处理的过程。
7、第一处理可以是基于作为第一传感器的检测结果的点云数据来检测车辆周围中的对象的过程,并且第二处理可以是在从点云数据去除一些点数据之后检测周围中的对象的过程。
8、接收部作为操作可以接收第一选择操作或第二选择操作,在第一选择操作中,在第二处理中点数据的移除程度大,
9、在第二选择操作中,在第二处理中点数据的移除程度小,以及处理部可以响应于所接收的第一选择操作或第二选择操作来从点云数据中去除点数据。
10、作为第二处理,处理部可以处理第一传感器的检测结果和不同于第一传感器的第二传感器的检测结果。
11、控制器还可以包括识别部,其从第一传感器的检测结果中识别天气,其中,当识别出天气恶劣时,处理部可以将第一处理切换到第二处理。
12、处理部可以使在执行第二处理时的车辆速度比在切换之前执行第一处理时的车辆速度慢。
13、当接收部在第一处理和第二处理中的一个执行的同时接收到操作时,处理部可以切换到第一处理和第二处理中的另一个。此外,车辆控制部可以基于第一处理或第二处理的处理结果来控制车辆的转向部的转向或通知部的控制通知。
14、技术效果
15、根据本公开,可以考虑到传感器的错误检测而控制车辆。
技术特征:
1.一种控制器,包括:
2.根据权利要求1所述的控制器,其中,
3.根据权利要求1所述的控制器,其中,
4.根据权利要求3所述的控制器,其中,
5.根据权利要求1所述的控制器,其中,
6.根据权利要求2所述的控制器,还包括:
7.根据权利要求6所述的控制器,其中,
8.根据权利要求1所述的控制器,其中,
9.根据权利要求1所述的控制器,其中,
技术总结
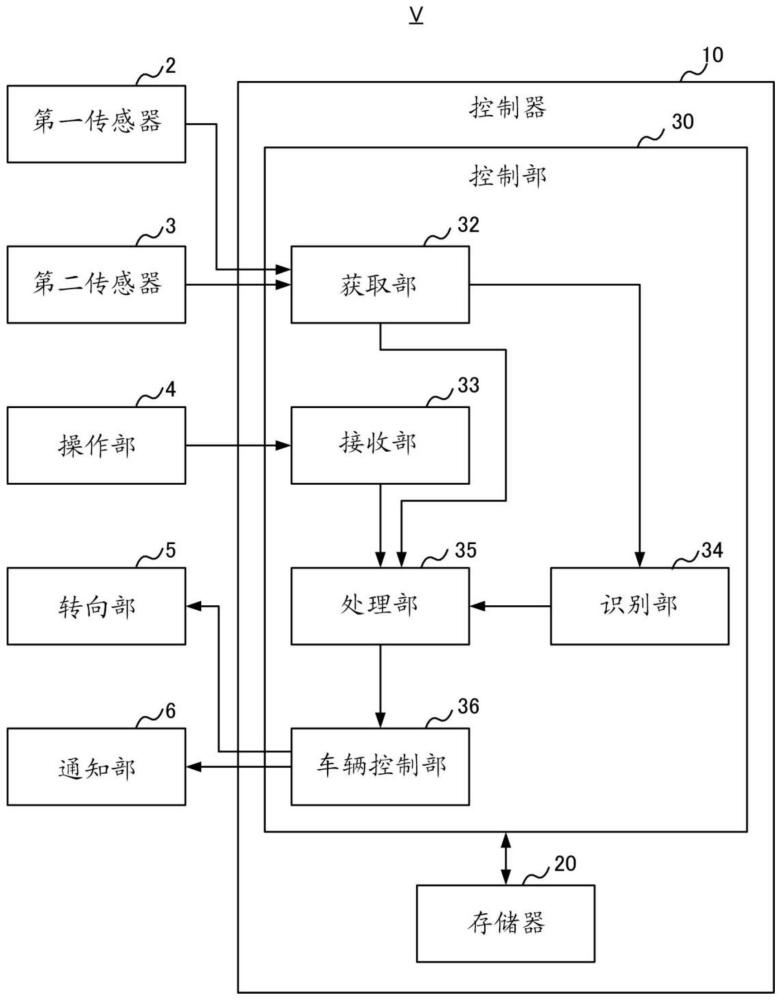
控制器10包括:获取部32,从安装在车辆V上的第一传感器2获取检测结果,并检测车辆V的周围状况;处理部35,对所获取的检测结果执行第一处理或与第一处理不同的第二处理;车辆控制部36,基于处理部35的处理结果来控制车辆V;以及接收部33,其接收车辆V的驾驶员的与检测结果的处理相关的处理操作。当接收部33接收到处理操作时,处理部35在第一处理和第二处理之间切换。
技术研发人员:岩城祐辉
受保护的技术使用者:五十铃自动车株式会社
技术研发日:
技术公布日:2024/7/15
- 还没有人留言评论。精彩留言会获得点赞!