适用于弯道行驶的车辆跟踪控制方法、电子设备及计算可读存储介质与流程
本发明属于车辆规划控制,特别涉及一种适用于弯道行驶的车辆跟踪控制方法。
背景技术:
1、随着新能源车辆及车辆智能化的不断发展,无人驾驶成为越来越火热的研究方向。无人驾驶最大的优势在于降低道路事故的风险,同时,还可以对无人驾驶汽车进行远程操控,从而实现更高效的交通管理。在智能交通领域,无人驾驶汽车的发展应用前景非常广阔。在驾驶培训领域,无人驾驶也逐渐开始被用于为学员演示示驾驶规范,便于学员更直观的理解驾驶操作标准。
2、车辆跟踪是实现自动驾驶的关键技术之一,即通过自主转向来实现汽车准确、快速、稳定地沿着期望路径行驶。现有车辆跟踪主要分低速跟踪和高速跟踪,其中,低速跟踪主要用几何跟踪算法,通常自动驾驶跟踪场景中不会对转弯曲率有特别要求。目前在驾校科目二训练场地中,包括曲线行驶、直角转弯这些必须的大曲率规划路径,对车辆跟踪提出了更高的要求,现有的几何跟踪算法在驾驶培训应用中存在转弯跟踪不足的问题,若控制车辆形式路线不精准会出现压线的情况,无法满足驾培演示及收发车等业务需求。
技术实现思路
1、为了克服现有技术中车辆控制算法在无人驾驶规划路径中大曲率弯道处存在跟踪精度较差的问题,本发明提供一种适用于弯道行驶的车辆跟踪控制方法、电子设备及计算可读存储介质,通过对现有几何跟踪算法进行优化,以实现无人驾驶车辆在大曲率弯道处对规划路径的高精度跟踪。
2、为了实现上述目的,本发明采用的技术方案如下:
3、本发明的第一方面公开一种适用于弯道行驶的车辆跟踪控制方法,其包括:
4、基于阿克曼转向原理建立车辆运动学模型如下:
5、
6、式中:β为车辆前外轮转角,α为车辆前内轮转角,l为车辆轴距,d为车辆车辆前外轮和前内轮之间的距离;
7、将所述车辆运动学模型简化成自行车运动学模型如下:
8、
9、式中,δ为简化后的前轮转角,r为车辆转弯半径;
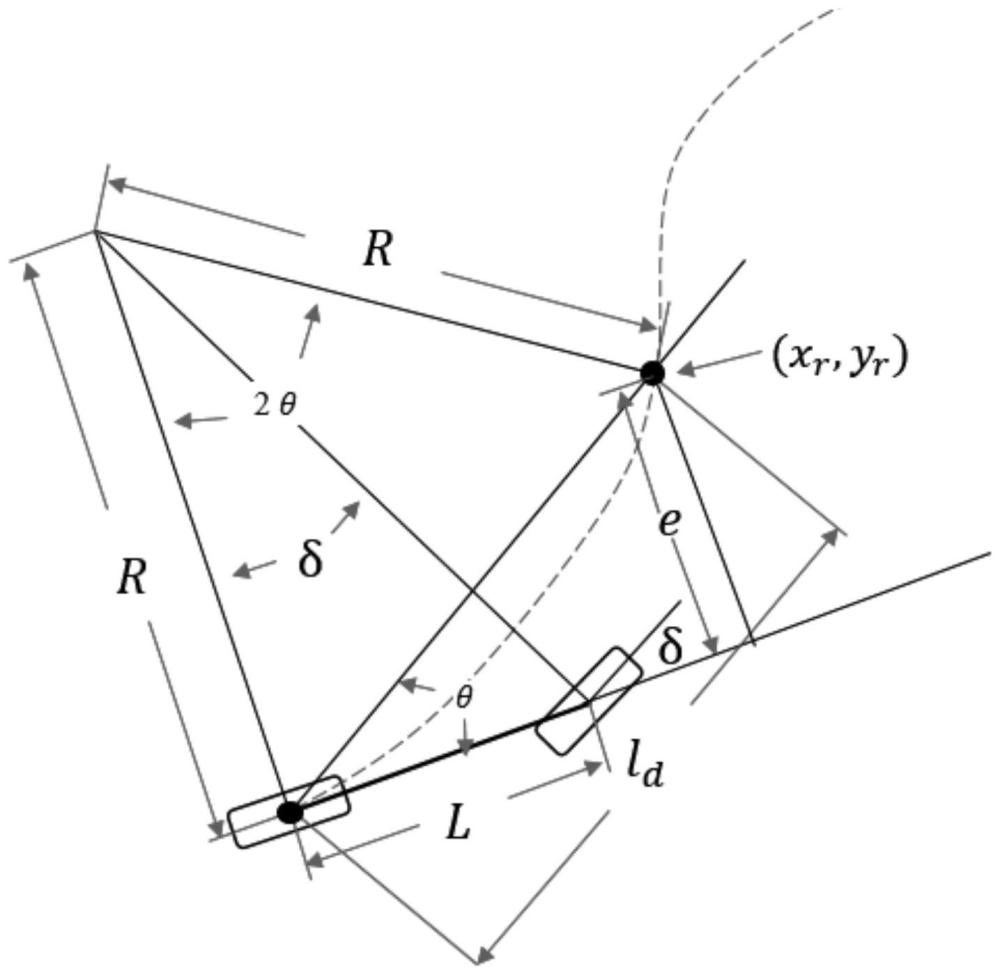
10、基于简化的车辆运动学模型,构建车辆几何跟踪算法,得到简化后前轮转角δ与车辆轴距l、前视距离ld、车身与预瞄点的夹角θ之间的第一关系式,所述第一关系式为:
11、
12、或者,得到简化后前轮转角δ与车辆轴距l、前视距离ld、横向位置误差e之间的第二关系式,所述第二关系式为:
13、
14、结合规划路径的实时曲率,建立所述前视距离ld与规划路径的实时曲率值ρ之间的第三关系式,所述第三关系式为:
15、
16、式中,k为改正常数,ρ为规划路径的实时曲率值;
17、基于所述第一关系式和第三关系式或者所述第二关系式和第三关系式,实时计算车辆的前轮转角δ;
18、根据前轮转角δ实现对车辆的横向控制。
19、可选的,所述预设基础前视距离l设置为2米,改正常数k=0.4。
20、本发明的第二方面公开一种电子设备,其包括处理器和存储器;所述处理器用于调用存储器中存储的计算机程序,执行本发明第一方面所公开的适用于弯道行驶的车辆跟踪控制方法。
21、本发明的第三方面公开一种计算机可读存储介质,所述计算机可读存储介质用于存储程序代码,所述程序代码用于执行本发明第一方面所公开的适用于弯道行驶的车辆跟踪控制方法。
22、本发明具有以下有益效果:
23、本发明通过优化几何车辆跟踪算法来实现低速场景下车辆对规划路径中曲率较大路线的精确跟踪,从而提高无人驾驶在低速场景下弯道行驶的跟踪精度,能够实现车辆在驾驶培训场地中高精度的演示及收发车等业务功能,大大优化了学员的学车体验,提高了驾校的运营效率。
技术特征:
1.一种适用于弯道行驶的车辆跟踪控制方法,其特征在于,包括:
2.如权利要求1或2所述的适用于弯道行驶的车辆跟踪控制方法,其特征在于,所述预设基础前视距离l设置为2米,改正常数k=0.4。
3.一种电子设备,其特征在于,包括处理器和存储器;所述处理器用于调用存储器中存储的计算机程序,执行权利要求1或2所述的适用于弯道行驶的车辆跟踪控制方法。
4.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质用于存储程序代码,所述程序代码用于执行权利要求1或2所述的适用于弯道行驶的车辆跟踪控制方法。
技术总结
本发明公开一种适用于弯道行驶的车辆跟踪控制方法,其包括:基于阿克曼转向原理建立车辆运动学模型,将所述车辆运动学模型简化成自行车运动学模型;基于简化的车辆运动学模型,构建车辆几何跟踪算法,得到简化后的第一关系式或者第二关系式;结合规划路径的实时曲率,建立所述前视距离与规划路径的实时曲率值之间的第三关系式;基于第一关系式和第三关系式或者第二关系式和第三关系式,实时计算车辆的前轮转角;根据前轮转角对车辆进行横向控制。本发明通过对现有几何跟踪算法进行优化,实现无人驾驶车辆在大曲率弯道处对规划路径的高精度跟踪。
技术研发人员:薛文骞,张铁监,吴松,叶剑
受保护的技术使用者:多伦互联网技术有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!