滚轮机构及缆索机器人的制作方法
本发明涉及缆索检修,尤其涉及一种滚轮机构及缆索机器人。
背景技术:
1、经过30多年的大规模基础设施建设,我国早期建设的缆索类桥梁开始进入维修的高峰期。缆索是缆索类桥梁的关键受力构件,包括斜缆索、主缆和吊索,一般由多组平行钢丝或钢绞绳构成,外表覆盖pe保护层。由于其保护层老化及风振、雨振因素,导致内部钢丝束受雨水渗透腐蚀并造成断股现象。为了延长桥梁缆索的寿命,经常需要检修机器人对桥梁缆索表面的pe保护层进行检修,以保证桥梁缆索不易被腐蚀。
2、相关技术中,检修机器人包括机器人本体与四个滚轮结构,四个滚轮结构分别转动装配于机器人本体的四个边角位置,且各个滚轮结构与机器人本体之间设置有可弹性伸缩的减震器。由此,检修机器人通过滚轮结构在沿桥梁缆索行走时,若滚轮结构在爬行过程中遇到路障,滚轮结构能够克服减震器的弹力进行转动,以越过桥梁缆索上的障碍。
3、然而,检修机器人采用上述的结构形式,由于需要设置较多数量的减震器,导致检修机器人的尺寸较大且成本较高。上述检修机器人越障能力较小,所能适应的缆索规格变化范围较小。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出了一种滚轮机构及缆索机器人,能够减小检修机器人的尺寸及重量。
2、第一方面,本申请实施例提供了滚轮机构,包括:
3、安装座;
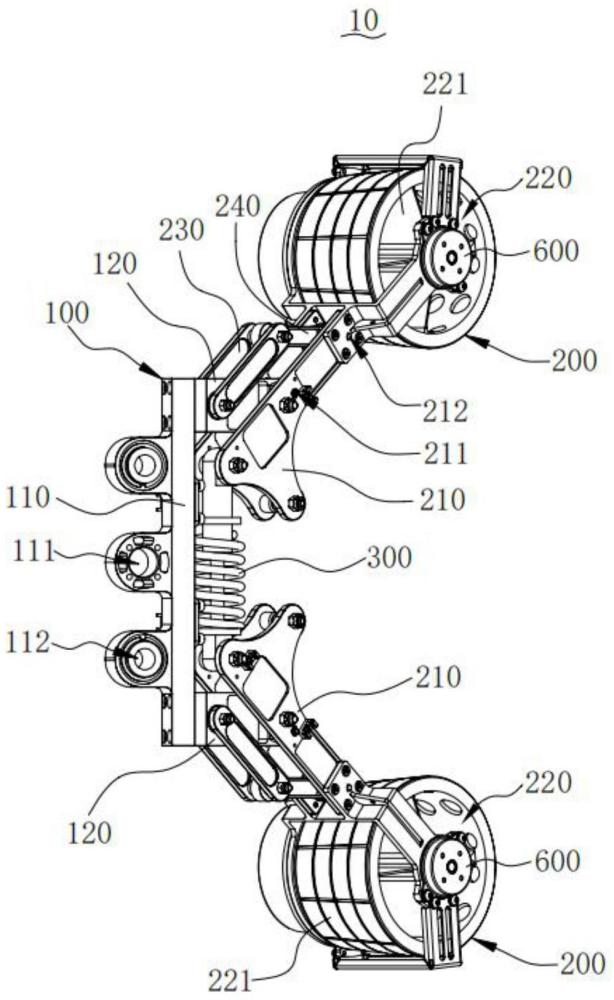
4、设置于所述安装座且同平面设置的两个滚轮组件,各个所述滚轮组件包括转动连杆与滚轮结构,所述转动连杆与所述安装座转动连接,所述滚轮结构与所述转动连杆的一端部相连接;
5、弹性伸缩机构,一端部与所述一个所述转动连杆转动连接,另一端部与另一个所述转动连杆转动连接,所述安装座在所述转动连杆长度方向的连接位设置于所述弹性伸缩机构的连接位与所述滚轮结构的连接位之间。
6、根据本发明的一些实施例,各个所述转动连杆与所述弹性伸缩机构之间的角度大于90度设置。
7、根据本发明的一些实施例,各个所述滚轮组件还包括第一连杆与第二连杆,所述第一连杆与所述第二连杆转动连接,所述第一连杆远离所述第二连杆的端部与所述安装座转动连接,所述第二连杆远离所述第一连杆的端部与所述转动连杆转动连接,所述第二连杆在所述转动连杆长度方向的连接位设置于所述弹性伸缩机构与滚轮结构之间。
8、根据本发明的一些实施例,所述转动连杆具有与所述安装座相连接的第一连接位以及与所述第二连杆相连接的第二连接位,所述第二连接位设置于所述第一连接位与所述滚轮结构之间。
9、根据本发明的一些实施例,所述滚轮机构还包括驱动电机与编码器,其中,所述驱动电机与所述转动连杆相连接,并与所述滚轮结构的转轴相连接,所述编码器与所述转动连杆相连接,并与所述滚轮结构的转轴相连接。
10、根据本发明的一些实施例,所述滚轮机构还包括单向阻尼器,所述单向阻尼器与所述转动连杆相连接,并与所述滚轮结构的转轴相连接,用于为所述滚轮结构的滚轮提供旋转阻力。
11、根据本发明的一些实施例,所述安装座包括垂直设置的安装部与延伸部,所述延伸部设置有两个,一个所述延伸部的端部与所述安装部的一端部相连接,该延伸部的另一端部与一个所述滚轮组件的转动连杆转动连接;
12、另一个所述延伸部的端部与所述安装部的另一端部相连接,该延伸部的另一端部与另一个所述滚轮组件的转动连杆转动连接。
13、根据本发明的一些实施例,所述安装座设置有供导向杆穿设的导向孔和供丝杆螺母座穿设的定位孔。
14、根据本发明的一些实施例,所述滚轮结构的滚轮呈圆台状设置;其中,两个所述滚轮的同端部朝向相同设置;或,两个所述滚轮的同端部朝向相反设置。
15、第二方面,本申请实施例提供了一种缆索机器人,包括:
16、机器人本体;
17、上述的滚轮机构,所述滚轮机构设置于所述机器人本体,所述滚轮机构的滚轮结构用于沿缆索爬行。
18、从以上技术方案可以看出,本申请实施例具有以下优点:相比于各个滚轮组件分别连接有弹性伸缩机构,本申请两个滚轮组件共用同一个弹性伸缩机构,如此设置,滚轮机构的各个零部件紧凑地装配至一起,很显然地,并使缆索机器人的占用空间以及重量均得到了减小,滚轮机构可以灵活地装配于缆索机器人,并使缆索机器人的占用空间也得到了缩小。另外,滚轮机构仅采用了一个。
技术特征:
1.滚轮机构,其特征在于,包括:
2.根据权利要求1所述的滚轮机构,其特征在于,各个所述转动连杆与所述弹性伸缩机构之间的角度大于90度设置。
3.根据权利要求1所述的滚轮机构,其特征在于,各个所述滚轮组件还包括第一连杆与第二连杆,所述第一连杆与所述第二连杆转动连接,所述第一连杆远离所述第二连杆的端部与所述安装座转动连接,所述第二连杆远离所述第一连杆的端部与所述转动连杆转动连接,所述第二连杆在所述转动连杆长度方向的连接位设置于所述弹性伸缩机构与滚轮结构之间。
4.根据权利要求3所述的滚轮机构,其特征在于,所述转动连杆具有与所述安装座相连接的第一连接位以及与所述第二连杆相连接的第二连接位,所述第二连接位设置于所述第一连接位与所述滚轮结构之间。
5.根据权利要求1所述的滚轮机构,其特征在于,所述滚轮机构还包括驱动电机与编码器,其中,所述驱动电机与所述转动连杆相连接,并与所述滚轮结构的转轴相连接,所述编码器与所述转动连杆相连接,并与所述滚轮结构的转轴相连接。
6.根据权利要求1所述的滚轮机构,其特征在于,所述滚轮机构还包括单向阻尼器,所述单向阻尼器与所述转动连杆相连接,并与所述滚轮结构的转轴相连接,用于为所述滚轮结构的滚轮提供旋转阻力。
7.根据权利要求1所述的滚轮机构,其特征在于,所述安装座包括垂直设置的安装部与延伸部,所述延伸部设置有两个,一个所述延伸部的端部与所述安装部的一端部相连接,该延伸部的另一端部与一个所述滚轮组件的转动连杆转动连接;
8.根据权利要求1所述的滚轮机构,其特征在于,所述安装座设置有供导向杆穿设的导向孔和供丝杆螺母座穿设的定位孔。
9.根据权利要求1所述的滚轮机构,其特征在于,所述滚轮结构的滚轮呈圆台状设置;其中,两个所述滚轮的同端部朝向相同设置;或,两个所述滚轮的同端部朝向相反设置。
10.一种缆索机器人,其特征在于,包括:
技术总结
本发明公开一种滚轮机构及缆索机器人,包括:安装座;设置于所述安装座且同平面设置的两个滚轮组件,各个所述滚轮组件包括转动连杆与滚轮结构,所述转动连杆与所述安装座转动连接,所述滚轮结构与所述转动连杆的一端部相连接;弹性伸缩机构,一端部与所述一个所述转动连杆转动连接,另一端部与另一个所述转动连杆转动连接,所述安装座在所述转动连杆长度方向的连接位设置于所述弹性伸缩机构的连接位与所述滚轮结构的连接位之间。两个滚轮组件共用同一个弹性伸缩机构,如此设置,滚轮机构的各个零部件紧凑地装配至一起,很显然地,滚轮机构的占用空间得到了缩小。另外,滚轮机构仅采用了一个弹性伸缩机构,节约了滚轮机构的成本,从而节约了成本。
技术研发人员:丁宁,元小强,陈鑫杰,付雪奇,何旭春,林枝有,张爱东
受保护的技术使用者:深圳市人工智能与机器人研究院
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!