雨量传感器的防误刮控制方法与流程
本发明涉及雨量传感器,尤其是一种雨量传感器的防误刮控制方法。
背景技术:
1、随着自动驾驶的普及,自动驾驶中的激光雷达对雨量传感器的干扰越来越明显,因为现有雨量传感器的设计方案中没有考虑激光雷达对刮刷信号的干扰。同时,现有设计方案中雨量信号的防误策略是一个静态参数设置,即根据汽车的玻璃状态在前期标定时针对不同时间段(如中午、早上、傍晚)及不同的工况(如林荫路段、霓虹灯路段、正午太阳路段和转弯路段等)进行的参数采集,根据采集到的参数设置起刮信号。这样会出现两种情况:1.真正下雨天雨刮器起刮较慢,2.在没有下雨的情况下雨刮器突然进行了刮刷。出现这种情况主要是因为前期标定设置的参数很难覆盖所有的工况。
2、现有雨量传感器防误刮控制方法还是采用在不同的车型上进行标定,标定后将参数固化下来,设置一个阈值,当检测到的雨量信号超过此值后发送过刮刷信号,使雨刮器器进行刮刷。
技术实现思路
1、本发明要解决的技术问题是:克服现有技术中之不足,提供一种能够准确提取到各种工况的有效数据和干扰信号,从而解决了在没有下雨的情况下使雨刮器产生的误刮现象、也解决在下雨天起刮慢现象的雨量传感器的防误刮控制方法。
2、本发明解决其技术问题所采用的技术方案是:一种雨量传感器的防误刮控制方法,其特征在于,包括如下步骤:
3、s1、将环境光信号检测单元和前方光信号检测单元实时采集的电压信号传输给光线信号存储器,光线信号存储器将信息传输给光线信号计算单元,由光线信号计算单元计算得到光线的变化速率后传输给光线信号补偿单元,光线信号补偿单元根据车速信号和光线的变化速率计算出光线信号补偿值;
4、s2、将左通道阳光信号检测单元和右通道阳光信号检测单元实时采集的电压信号传输给阳光信号存储器,阳光信号存储器将信息传输给阳光信号计算单元,由阳光信号计算单元计算得到左通道阳光的变化速率和右通道阳光的变化速率后传输给阳光信号判定单元,经阳光信号判定左、右通道阳光的变化速率是否有效,有效则传输给阳光信号补偿单元,阳光信号补偿单元根据车速信号和左、右通道阳光的变化速率计算出阳光信号补偿值;
5、s3、将红外雷达测距模块发出的低频测距信号传输至波长屏蔽器,波长屏蔽器屏蔽掉雨量传感器接收范围的波长后传输给频率识别器,频率识别器识别红外雷达测距模块发出的红外光低率信号传输给脉冲信号存储器,脉冲信号存储器将信号数据传输给红外信号算法单元,由红外信号算法单元计算出红外信号补偿值;
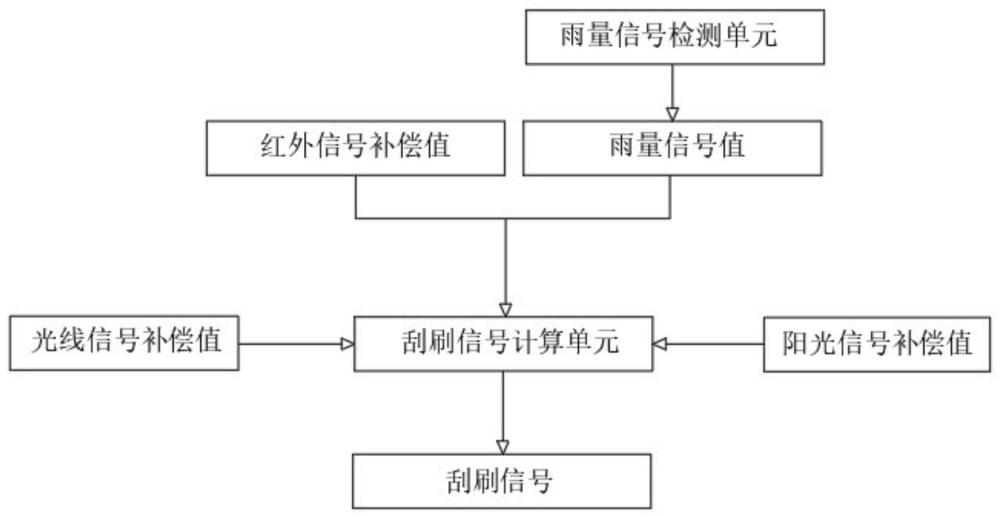
6、s4、将雨量信号检测单元实时采集的雨量信号值、步骤s1中的光线信号补偿值、步骤s2中的阳光信号补偿值和步骤s3中的红外信号补偿值输入刮刷信号计算单元,通过式(一)和式(二)的计算公式计算输出刮刷信号给雨刮控制器,由雨刮控制器控制雨刮器进行刮刷动作;
7、f(x)=(infraredray_factor)*(rain_factor)*(light_factor)*(sun_fac tor) (一)
8、△wi=∫f(x)dt (二)
9、式(一)中:infraredray_factor为红外信号补偿值;rain_factor为雨量信号值;light_factor为光线信号补偿值;sun_factor为阳光信号补偿值;
10、式(二)中:dt为每次的计数周期值10毫秒;∫f(x)dt为每10ms对以上信号进行求和计数;△wi为累计的信号和。
11、进一步地,步骤s1中环境光信号检测单元在汽车行驶中实时检测垂直于地面90°±40°的光线值,并通过环境光接收管采集到的电压信号转换为以lux为单位的流明值。
12、更进一步地,步骤s1中前方光信号检测单元在汽车行驶中实时检测平行于地面0°±30°的光线值,并通过前方光接收管采集到的电压信号转换为以lux为单位的流明值。
13、更进一步地,步骤s1中光线信号存储器保存环境光信号检测单元和前方光信号检测单元转换后的流明值和每个流明值对应的采集时间。
14、进一步地,步骤s2中左通道阳光信号检测单元在汽车行驶中实时检测主驾驶位0°~180°阳光辐照度值,并通过左通道阳光接收管采集到的电压信号转换以w/m2单位的能量值。
15、更进一步地,步骤s2中右通道阳光信号检测单元在汽车行驶中实时检测副驾驶位0°~180°阳光辐照度值,并通过右通道阳光接收管采集到的电压信号转换以w/m2单位的能量值。
16、更进一步地,步骤s2中阳光信号存储器保存左能道阳光信号检测单元和右能道阳光信号检测单元转换后的能量值和每个能量值对应的采样时间。
17、进一步地,所述步骤s3中红外雷达测距模块发出的低频测距信号的波长为905nm。
18、本发明的有益效果是:
19、本发明为实时动态的数据采集分析过程,将外界可能的干扰信号,如上方光线信号、前方光信号、左通道阳光信号、右通道阳光信号、红外光信号及汽车行驶的速度实时采集分析计算后输出光线信号补偿值、阳光信号补偿值和红外信号补偿值,再结合雨量信号值通过刮刷信号算法最终输出刮刷信号启动雨刮器进行刮刷;
20、本发明能够解决汽车雨量传感器在没有下雨的情况下偶尔出现雨刮器错误的自动刮刷的现象和在下雨天雨刮器起刮较慢的现象,这样就能给乘驾人员更加舒适的驾乘体验,同时也避免了在下雨天因起刮较慢导致前挡风玻璃产生了较多的雨滴遮挡驾驶员视线的现象,提高了行驶过程中的安全系数,进一步保障了财产和生命的安全;
21、本发明能够识别和屏蔽激光雷达信号,所以同时也解决了自动驾驶中的激光雷达对雨量传感器的干扰。
技术特征:
1.一种雨量传感器的防误刮控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的雨量传感器的防误刮控制方法,其特征在于:步骤s1中环境光信号检测单元在汽车行驶中实时检测垂直于地面90°±40°的光线值,并通过环境光接收管采集到的电压信号转换为以lux为单位的流明值。
3.根据权利要求2所述的雨量传感器的防误刮控制方法,其特征在于:步骤s1中前方光信号检测单元在汽车行驶中实时检测平行于地面0°±30°的光线值,并通过前方光接收管采集到的电压信号转换为以lux为单位的流明值。
4.根据权利要求3所述的雨量传感器的防误刮控制方法,其特征在于:步骤s1中光线信号存储器保存环境光信号检测单元和前方光信号检测单元转换后的流明值和每个流明值对应的采集时间。
5.根据权利要求1所述的雨量传感器的防误刮控制方法,其特征在于:步骤s2中左通道阳光信号检测单元在汽车行驶中实时检测主驾驶位0°~180°阳光辐照度值,并通过左通道阳光接收管采集到的电压信号转换以w/m2单位的能量值。
6.根据权利要求5所述的雨量传感器的防误刮控制方法,其特征在于:步骤s2中右通道阳光信号检测单元在汽车行驶中实时检测副驾驶位0°~180°阳光辐照度值,并通过右通道阳光接收管采集到的电压信号转换以w/m2单位的能量值。
7.根据权利要求5所述的雨量传感器的防误刮控制方法,其特征在于:步骤s2中阳光信号存储器保存左能道阳光信号检测单元和右能道阳光信号检测单元转换后的能量值和每个能量值对应的采样时间。
8.根据权利要求1所述的雨量传感器的防误刮控制方法,其特征在于:所述步骤s3中红外雷达测距模块发出的低频测距信号的波长为905nm。
技术总结
本发明涉及雨量传感器技术领域,尤其是一种雨量传感器的防误刮控制方法。一种雨量传感器的防误刮控制方法为实时动态的数据采集分析过程,将外界可能的干扰信号:环境光信号、前方光信号、左通道阳光信号、右通道阳光信号、红外光信号及汽车行驶的速度实时采集分析计算后输出光线信号补偿值、阳光信号补偿值和红外信号补偿值,再结合雨量信号值通过刮刷信号算法最终输出刮刷信号启动雨刮器进行刮刷。本发明能够解决汽车雨量传感器在没有下雨的情况下偶尔出现雨刮器错误的自动刮刷的现象和在下雨天雨刮器起刮较慢的现象,能够识别和屏蔽激光雷达信号,所以同时也解决了自动驾驶中的激光雷达对雨量传感器的干扰。
技术研发人员:江留胜,吴延刚
受保护的技术使用者:江苏日盈电子股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!