一种基于路面不平度识别的悬架控制方法与流程
本发明涉及车辆底盘悬架控制领域,具体形容为一种基于路面不平度识别的悬架控制方法。
背景技术:
1、目前,能够感知路面状态并相应调节悬架状态的电控悬架系统被用于在被动悬架系统的基础上改善车辆在各种路面工况上的平顺性和操纵稳定性,对路面状态的高精度、高可靠感知是一款性能优良的电控悬架系统的基础,电控悬架系统的成本也很大程度取决于路面状态识别方法的成本。
2、电控悬架主要需要感知路面不平度信息,当前主流的路面不平度识别需要车辆每个悬架上的车高传感器用来检测每个悬架的压缩或伸展和车身上的三个加速度传感器用来分别检测车辆的纵向、横向和垂向的加速度。主流的电控悬架系统需要至少四个车高传感器和三个加速度传感器来为路面不平度识别提供检测数据,一些电控悬架系统为了提前感知路面不平度信息,还需要引入例如激光雷达,车载摄像机等传感器,进一步增加了电控悬架系统传感器的结构复杂度,从而导致了电控悬架系统线束变得复杂,成本进一步升高。由于每个传感器都可能面临独立的故障或失效风险,更多的传感器也意味着电控悬架系统故障率的增大,这降低了电控悬架系统的可靠性。传感器的失效会导致车辆平顺性和操纵稳定性的下降,更多的传感器对于电控悬架系统的故障检测系统也提出了更高的要求。除此之外路面不平度识别所需的算力和复杂程度随着传感器数量的增加也进一步上升,路面不平度识别还应考虑到某个传感器失效后悬架系统的稳定性,对电子控制单元性能要求也更高,这进一步增加了电控悬架系统的成本和开发难度。
3、除了系统过于复杂带来的成本和可靠性问题外,现有的电控悬架系统对路面不平度的识别能力仍有待进一步提高。传统的电控悬架系统只能根据车辆驶过当前路面时,悬架的响应状态进行控制,在作用到悬架系统的过程中会产生时滞等不利影响,当车辆驶过凸起和凹坑类型的离散冲击类别的路面区域时,传统的电控悬架系统无法及时做出响应,因此难以改善车辆在驶过离散冲击类别路面区域时的操纵稳定性和平顺性,为了解决该问题,在电控悬架系统上安装了车载摄像头或激光雷达等传感器以便电控悬架系统及时对路面工况的变化做出响应。
4、已有的基于视觉的电控悬架系统解决了传统电控悬架系统在离散冲击类别的路面工况下控制效果的不足,但其仍存在以下不足。
5、第一,基于视觉的电控悬架系统只能对离散冲击类别的路面区域进行提前检测,在连续随机类别的路面区域上时仍然是根据当前路面悬架响应状态进行控制,对连续随机类别路面区域的识别能力不足,因此其在连续随机类别的路面上的控制效果有待进一步提高。
6、第二,电控悬架系统在引入了视觉传感器或各类雷达后拥有了更多的传感器,系统更加复杂,需要更高性能的电子控制单元用以处理传感器数据,因而电控悬架系统的成本一直居高不下,限制了其大规模推广应用。
7、第三,现有的电控悬架系统应用的控制方法难以满足在复杂路面工况条件下均衡车辆平顺性与操纵稳定性的需求,对于电控悬架系统,选择出能够提供最佳减振效果的控制策略至关重要,应用不同的控制策略时悬架性能及减振效果会有很大的差异。当前电控悬架领域应用较广的天棚控制、地棚控制策略等经典数值运算控制策略都无法满足在复杂路面工况条件下均衡车辆平顺性与操纵稳定性的需求,而以线性二次型调节器和线性高斯二次型调节器控制策略为代表的线性反馈控制策略和以模糊控制、神经网络控制为代表的智能控制策略则分别由于真实复杂工况下建模精度不足以及对算力要求高的原因大多停留在理论阶段,实际应用较少。
技术实现思路
1、本发明是为了解决上述现有技术存在的不足之处,提出一种基于路面不平度识别的悬架控制方法,以期能够对不同路面不平度类别进行有效识别检测的基础上,能满足车辆在不同类别路面上的平顺性和操纵稳定性性能需求。
2、本发明为达到上述发明目的,采用如下技术方案:
3、本发明一种基于路面不平度识别的悬架控制方法的特点在于,是按如下步骤进行:
4、步骤1、令相邻两个时间间隔为δt,则任意一个时间间隔的序号记为t,假设车辆在相邻两个时间间隔δt的位移相等;
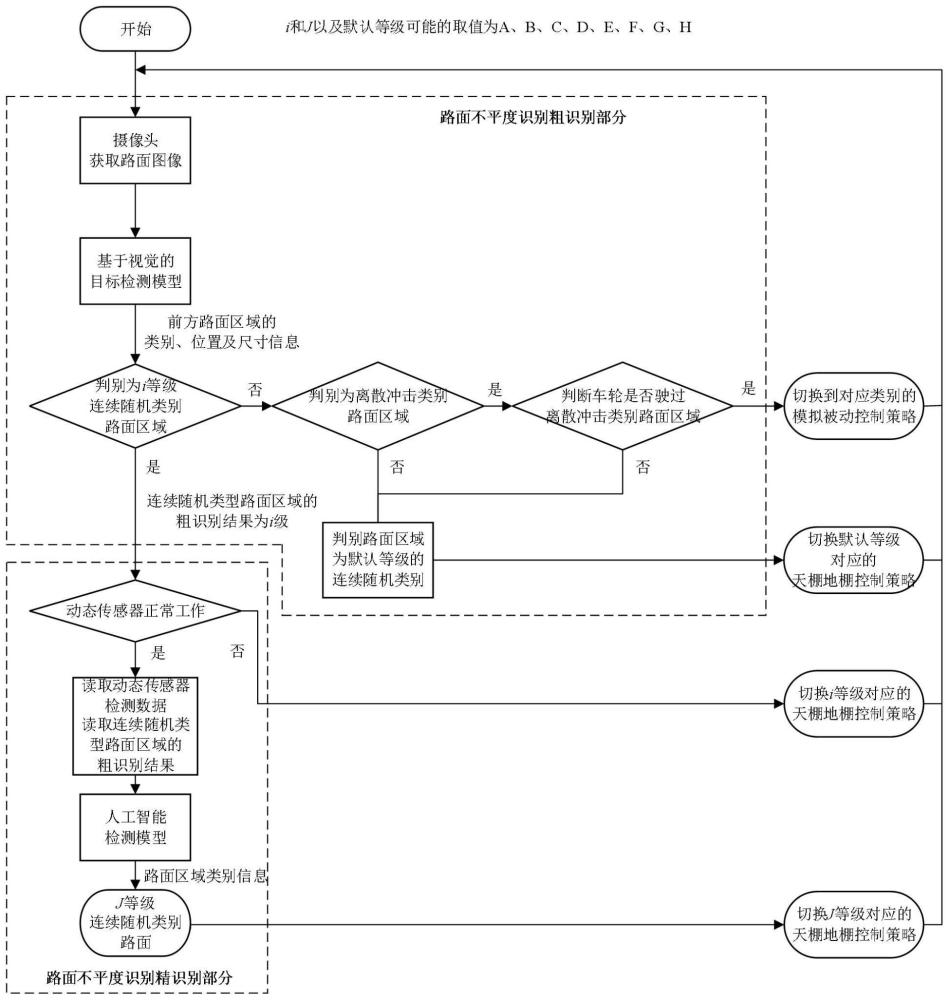
5、车辆摄像头获取第t个时间间隔内的车辆前方道路的路面图像p(t),并利用动态传感器获取第t个时间间隔内的检测数据x(t);
6、步骤2、将路面图像p(t)输入训练好的基于视觉的目标检测模型中进行识别,输出第t个时间间隔内的前方路面区域的不平度类别信息class(t)、路面区域的位置信息和路面区域的尺寸信息;
7、所述不平度类别信息包括:离散冲击类别和连续随机类别,其中,所述离散冲击类别包括:凸起类型和凹坑类型;将所述连续随机类别按照路面功率谱密度的升序划分为若干个等级;
8、所述位置信息包括:凸起类型的离散冲击类别的路面区域与车辆前轴之间的纵向距离和横向距离;凹坑类型的离散冲击类别的路面区域与车辆前轴之间的纵向距离和横向距离;
9、所述尺寸信息包括:凸起类型的离散冲击类别的路面区域中凸起的直径;凹坑类型的离散冲击类别的路面区域中凹坑的直径;
10、步骤3.1、判断class(t)是否为所述连续随机类别中的任意一个等级,若是,将class(t)记为第t个时间间隔内的连续随机类别路面粗识别分类结果,并执行步骤4,否则,执行步骤3.2;
11、步骤3.2、判断class(t)是否为离散冲击类别,若是,则执行步骤3.3,否则,表示基于视觉的目标检测模型未识别出第t个时间间隔内的车辆前方道路的路面图像p(t)的不平度类别信息,执行步骤3.4;
12、步骤3.3、判断式(1)是否成立,若成立,则采用车辆的模拟被动控制策略驶过离散冲击类别的路面区域,结束流程,否则,表示车辆车轮不会驶过离散冲击类别的路面区域,并执行步骤3.4;
13、
14、式(1)中,v(t)为第t个时间间隔内的车速;d为车辆轮距的一半;y(t)为第t个时间间隔内离散冲击类别的路面区域与车辆前轴之间的纵向距离,x(t)为第t个时间间隔内离散冲击类别的路面区域与车辆前轴之间的横向距离,l(t)为第t个时间间隔内离散冲击类别的路面区域中凸起或凹坑的直径;
15、步骤3.4、将class(t)设置为连续随机类别中的任意一个等级,并作为第t个时间间隔内的连续随机路面粗识别分类结果,并执行步骤4;
16、步骤4、判断动态传感器获取的第t-1个时间间隔内检测数据x(t-1)是否存在,若存在,则执行步骤5,否则,根据所述第t个时间间隔内的连续随机类别路面粗识别分类结果,确定混合系数α,从而采用车辆的天棚地棚混合控制策略驶过连续随机类别的路面区域,结束流程;
17、步骤5、将x(t-1)和第t个时间间隔内的连续随机类别路面粗识别分类结果输入训练好的基于动态传感器数据的人工智能检测模型中,并输出第t个时间间隔内的连续随机类别路面区域的精识别分类结果,所述精识别分类结果为按照路面功率谱密度的升序划分为的若干个等级中的一个等级;从而根据所述精识别分类结果确定混合系数α,并采用车辆的天棚地棚混合控制策略驶过连续随机类别的路面区域。
18、本发明所述的悬架控制方法的特点也在于:
19、若class(t)为连续随机类别,则利用式(2)得到采用天棚地棚混合控制策略下悬架执行器在第t+1个时间间隔内的输出力fsg(t+1):
20、fsg(t+1)=αfsh(t+1)+(1-α)fgh(t+1) (2)
21、式(2)中,fsh(t+1)为采用天棚混合控制策略下悬架执行器在第t+1个时间间隔内的输出力;fgh(t+1)为采用地棚控制策略下悬架执行器在第t+1个时间间隔内的输出力,α为天棚地棚混合控制对应的混合系数;
22、若class(t)为离散冲击类别,利用式(3)得到采用模拟被动控制策略下悬架执行器在第t+1个时间间隔内的输出力fsim(t+1):
23、
24、式(3)中,crel(t+1)为第t+1个时间间隔内的簧载质量和非簧载质量的相对运动速度;cmax和cmin分别表示凸起或凹坑类型的离散冲击类别路面区域对应的悬架复原行程的阻尼和悬架压缩行程的阻尼值。
25、本发明一种电子设备,包括存储器以及处理器的特点在于,所述存储器用于存储支持处理器执行所述悬架控制方法的程序,所述处理器被配置为用于执行所述存储器中存储的程序。
26、本发明一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序的特点在于,所述计算机程序被处理器运行时执行所述悬架控制方法的步骤。
27、与已有技术相比,本发明有益效果体现在:
28、1、本发明在路面不平度识别中所需的信息采集机构仅包括车辆底盘控制系统中常用的例如加速度传感器、轮跳传感器或悬架行程传感器等动态传感器中的任意一种,以及用于高级驾驶辅助系统等系统的车载摄像头,分别用于基于动态传感器数据的人工智能算法和基于视觉的目标检测算法,所需传感器数量少,且最大限度利用了车辆其他系统的传感器,例如路面不平度识别可以共用为悬架控制方法提供输入量的加速度传感器。悬架控制方法采用经典的天棚地棚混合控制策略与模拟被动控制策略的耦合,算法简单,输入量仅为簧载质量速度和非簧载质量速度,可分别由两个加速度传感器的检测结果经过积分后获取,通过省去现有的电控悬架系统中的车高传感器和激光雷达等传感器,本发明能够减少传统电控悬架系统所用传感器的数量及结构复杂度,减低了成本,提高了系统的可靠性。
29、2、由于本发明所需传感器数量少、结构简单,省去了传感器数据融合等处理步骤,所需的传感器信号均为时域信号,处理传感器数据所需的算力较小,悬架控制方法为经典数值运算控制策略的耦合,根据路面不平度识别获取的路面工况切换至最适合的控制方法,这也降低了悬架控制方法的复杂度,因此本发明对电子控制单元算力要求低,从而在满足了电控悬架系统对传感器系统可靠性与实时性要求的同时进一步降低了系统的成本以及可靠性。
30、3、本发明针对各等级连续随机类别路面区域的特征区分不明显,难以通过基于视觉的方式识别的问题,将基于视觉的目标检测算法的连续随机类别路面粗识别分类结果结合动态传感器数据由基于动态传感器数据的人工智能算法进行精识别分类,粗识别结果的引入减少了基于动态传感器数据的人工智能算法所需传感器数据的种类数目的同时提高了基于动态传感器数据的人工智能算法对连续随机类别路面的精识别分类精度,精识别结果由于融合了基于视觉的目标检测算法提供的视觉预瞄信息,因此精识别结果既可以作为当前车辆所处的连续随机类别路面分类结果,也可作为前方一段路面的连续随机类别路面的分类结果,从而实现了对连续随机类别路面等级的低成本高精度识别。
31、4、相比现有的采用成本高昂的激光雷达等传感器对路面进行高算力需求的实时扫描计算处理数据以获取路面不平度信息的技术方案,本发明提出的路面不平度识别策略可以大大降低成本,而本发明提出的与路面不平度识别方法配合使用混合悬架控制方法相比当前电控悬架系统最常用的天棚控制、地棚控制策略等经典数值运算控制策略可以提高悬架系统在复杂路面工况下均衡平顺性和操纵稳定性需求的能力,在不安装新的传感器的前提下,本发明提出的路面不平度识别方法与悬架控制方法均可通过对现有车型的改装将现有车型的电控悬架系统升级成具备感知前方路面不平度信息的预瞄电控悬架系统,提高电控悬架系统在复杂路面工况下的控制效果。
- 还没有人留言评论。精彩留言会获得点赞!