车辆阻尼力输出控制方法、系统、车辆及存储介质与流程
本发明涉及车辆驾驶控制,尤其涉及一种车辆阻尼力输出控制方法、系统、车辆及存储介质。
背景技术:
1、蛇形绕桩抗侧倾功能是阻尼力连续可调半主动悬架汽车的功能之一,在车辆通过蛇形绕桩路况时,即需要连续多次变道的路况时,按照实际需要控制悬架阻尼力,以达到减小车辆倾斜程度的目的,从而提高车辆的驾驶舒适性和安全性。
2、目前常见的蛇形绕桩抗侧倾功能,主要是通过获取车辆的垂向加速度信号,然后根据垂向加速度信号进行查表,从而获取到阻尼力控制量,以根据阻尼力控制量控制悬架阻尼力。然而,这种方法在面对连续变道的复杂路况时,车辆的侧倾方向会伴随连续变道实时变化,容易出现车辆蛇形绕桩抗侧倾功能控制滞后的情况,因此,现有的车辆蛇形绕桩抗侧倾功能存在可靠性较低的问题。
技术实现思路
1、本发明实施例提供一种车辆阻尼力输出控制方法、系统、车辆及存储介质,以解决现有的蛇形绕桩抗侧倾功能的可靠性较低的问题。
2、一种车辆阻尼力输出控制方法,所述方法包括:
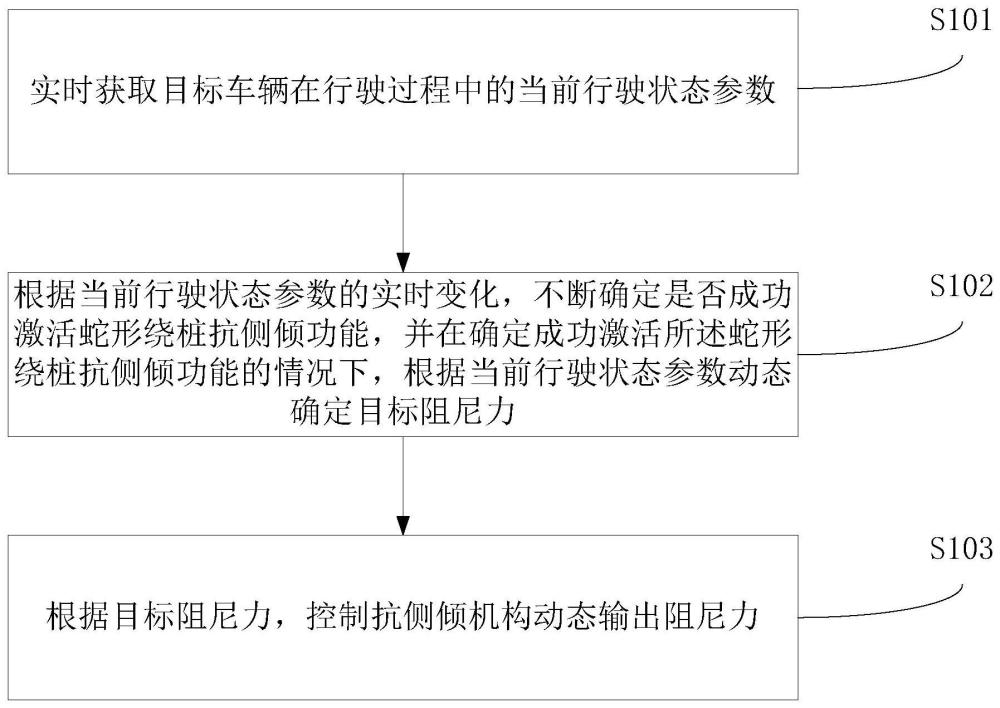
3、实时获取目标车辆在行驶过程中的当前行驶状态参数;
4、根据所述当前行驶状态参数的实时变化,不断确定是否成功激活蛇形绕桩抗侧倾功能,并在确定成功激活所述蛇形绕桩抗侧倾功能的情况下,根据所述当前行驶状态参数动态确定目标阻尼力;
5、根据所述目标阻尼力,控制抗侧倾机构动态输出阻尼力。
6、上述方法,可选的,所述根据所述当前行驶状态参数动态确定目标阻尼力,包括:
7、在连续确定成功激活所述蛇形绕桩抗侧倾功能的情况下,按照连续成功激活所述蛇形绕桩抗侧倾功能的次数和每次获取到的所述当前行驶状态参数,动态确定每次激活所述蛇形绕桩抗侧倾功能时对应的所述目标阻尼力。
8、上述方法,可选的,所述动态确定每次激活所述蛇形绕桩抗侧倾功能时对应的所述目标阻尼力,包括:
9、基于连续成功激活所述蛇形绕桩抗侧倾功能的次数,确定对应的阻尼力获取流程;
10、按照所述阻尼力获取流程和每次激活所述蛇形绕桩抗侧倾功能时对应的所述当前行驶状态参数,动态确定所述目标阻尼力。
11、上述方法,可选的,所述当前行驶状态参数包括:当前车速、当前车身垂向加速度、当前车辆驾驶模式;
12、所述阻尼力获取流程,包括:
13、按照所述当前车身垂向加速度和所述当前车速,查询第一阻尼表格,获取到第一阻尼力,确定所述第一阻尼力为所述目标阻尼力;
14、或者,
15、按照所述当前车速和所述当前车辆驾驶模式,查询第二阻尼力表格,获取到第二阻尼力,确定所述第二阻尼力为所述目标阻尼力。
16、上述方法,可选的,所述动态确定每次激活所述蛇形绕桩抗侧倾功能时对应的所述目标阻尼力之后,还包括:
17、在连续确定成功激活所述蛇形绕桩抗侧倾功能中断的情况下,启动阻尼保持功能,以保持最后一次成功激活所述蛇形绕桩抗侧倾功能时确定的所述目标阻尼力;
18、在启动所述阻尼保持功能达到第一预设时长后,启动阻尼缓降功能,以递减所述目标阻尼力。
19、上述方法,可选的,所述递减所述目标阻尼力,包括:
20、确定最后一次成功激活所述蛇形绕桩抗侧倾功能时的所述目标阻尼力对应的递减次数和递减时间间隔;
21、根据所述递减次数,确定每次递减对应的单位递减阻尼力;
22、按照所述单位递减阻尼力和所述递减时间间隔,周期性递减最后一次成功激活所述蛇形绕桩抗侧倾功能时的所述目标阻尼力。
23、上述方法,可选的,所述当前行驶状态参数包括所述目标车辆的当前车速、当前横摆角度和当前横摆角度变化率;
24、所述蛇形绕桩抗侧倾功能是否成功激活,通过如下方式确定:
25、判断所述当前车速是否超过预设的速度阈值;
26、如果所述当前车速超过所述速度阈值,判断所述横摆角度是否超过预设的横摆角度阈值;
27、如果所述横摆角度超过预设的横摆角度阈值,确定激活所述蛇形绕桩抗侧倾功能;
28、或者,
29、判断所述当前车是否超过预设的速度阈值;
30、如果所述当前车速超过所述速度阈值,判断所述当前横摆角度变化率是否超过预设的变化率阈值;
31、如果所述当前横摆角度变化率超过预设的变化率阈值,确定激活所述蛇形绕桩抗侧倾功能。
32、一种车辆阻尼力输出控制系统,所述系统包括:
33、参数实时获取模块,用于实时获取目标车辆在行驶过程中的当前行驶状态参数;
34、阻尼力动态确定模块,用于根据所述当前行驶状态参数的实时变化,不断确定是否成功激活蛇形绕桩抗侧倾功能,并在确定成功激活所述蛇形绕桩抗侧倾功能的情况下,根据所述当前行驶状态参数动态确定目标阻尼力;
35、阻尼力动态输出模块,用于根据所述目标阻尼力,控制抗侧倾机构动态输出阻尼力。
36、一种车辆,所述车辆包括控制器和抗侧倾机构,所述控制器控制所述抗侧倾机构实现如上述任一项所述车辆阻尼力输出控制方法。
37、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一项所述车辆阻尼力输出控制方法。
38、上述车辆阻尼力输出控制方法、系统、车辆及存储介质,通过实时获取目标车辆在行驶过程中的当前行驶状态参数,根据当前行驶状态参数的实时变化,动态确定是否成功激活蛇形绕桩抗侧倾功能,并在确定成功激活所述蛇形绕桩抗侧倾功能的情况下,根据当前行驶状态参数动态确定目标阻尼力,以根据目标阻尼力,控制抗侧倾机构动态输出阻尼力。可见,本发明通过实时获取目标车辆在行驶过程中的当前行驶状态参数,以根据实时获取到的当前行驶状态参数实时动态调整目标阻尼力,进而实现根据目标阻尼力,控制抗侧倾机构动态输出阻尼力,相较于现有技术,可以达到提高车辆蛇形绕桩抗侧倾功能可靠性的目的。
技术特征:
1.一种车辆阻尼力输出控制方法,其特征在于,所述方法包括:
2.如权利要求1所述的车辆阻尼力输出控制方法,其特征在于,所述根据所述当前行驶状态参数动态确定目标阻尼力,包括:
3.如权利要求2所述的车辆阻尼力输出控制方法,其特征在于,所述动态确定每次激活所述蛇形绕桩抗侧倾功能时对应的所述目标阻尼力,包括:
4.如权利要求3所述的车辆阻尼力输出控制方法,其特征在于,所述当前行驶状态参数包括:当前车速、当前车身垂向加速度、当前车辆驾驶模式;
5.如权利要求2所述的车辆阻尼力输出控制方法,其特征在于,所述动态确定每次激活所述蛇形绕桩抗侧倾功能时对应的所述目标阻尼力之后,还包括:
6.如权利要求5所述的车辆阻尼力输出控制方法,其特征在于,所述递减所述目标阻尼力,包括:
7.如权利要求1-6任一所述车辆阻尼力输出控制方法,其特征在于,所述当前行驶状态参数包括所述目标车辆的当前车速、当前横摆角度和当前横摆角度变化率;
8.一种车辆阻尼力输出控制系统,其特征在于,所述系统包括:
9.一种车辆,其特征在于,所述车辆包括控制器和抗侧倾机构,所述控制器控制所述抗侧倾机构实现如权利要求1至7任一项所述车辆阻尼力输出控制方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述车辆阻尼力输出控制方法。
技术总结
本发明涉及汽车驾驶控制技术领域,公开了一种车辆阻尼力输出控制方法、系统、车辆及存储介质,通过实时获取目标车辆在行驶过程中的当前行驶状态参数,根据当前行驶状态参数的实时变化,动态确定是否成功激活蛇形绕桩抗侧倾功能,并在确定成功激活所述蛇形绕桩抗侧倾功能的情况下,根据当前行驶状态参数动态确定目标阻尼力,以根据目标阻尼力,控制抗侧倾机构动态输出阻尼力。可见,本发明通过实时获取目标车辆在行驶过程中的当前行驶状态参数,以根据实时获取到的当前行驶状态参数实时动态调整目标阻尼力,进而实现根据目标阻尼力,控制抗侧倾机构动态输出阻尼力,相较于现有技术,可以达到提高车辆蛇形绕桩抗侧倾功能可靠性的目的。
技术研发人员:张智松,罗杰,毕祥如
受保护的技术使用者:广州汽车集团股份有限公司
技术研发日:
技术公布日:2024/6/2
- 还没有人留言评论。精彩留言会获得点赞!