数据处理方法、装置以及车辆与流程
本申请涉及车辆,更具体地,涉及一种数据处理方法、装置以及车辆。
背景技术:
1、随着车辆技术的不断发展,车辆侧倾中心作为侧倾动力学的基础,得到车辆侧倾中心的准确的位置显得尤为重要,在相关方式中,可以基于采集车辆中大量的传感器信息,以及建立相应车辆动力学模型,得到车辆侧倾中心的位置,但相关方式中,车辆侧倾中心的位置的准确性还有待提高。
技术实现思路
1、鉴于上述问题,本申请提出了一种数据处理方法、装置以及车辆,以实现改善上述问题。
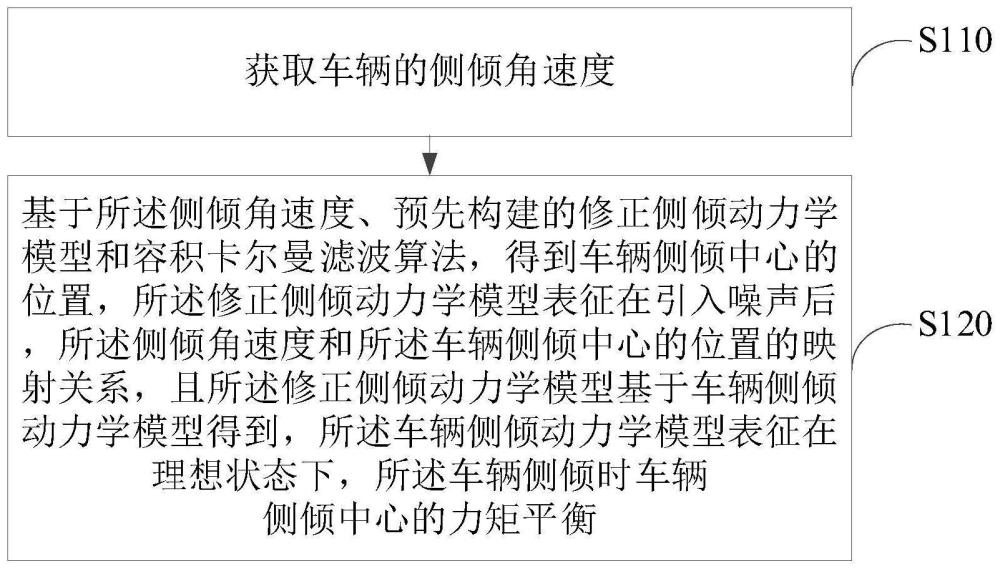
2、第一方面,本申请提供了一种数据处理方法,所述方法包括:获取车辆的侧倾角速度;基于所述侧倾角速度、预先构建的修正侧倾动力学模型和容积卡尔曼滤波算法,得到车辆侧倾中心的位置,所述修正侧倾动力学模型表征在引入噪声后,所述侧倾角速度和所述车辆侧倾中心的位置的映射关系,且所述修正侧倾动力学模型基于车辆侧倾动力学模型得到,所述车辆侧倾动力学模型表征在理想状态下,所述车辆侧倾时车辆侧倾中心的力矩平衡。
3、第二方面,本申请提供了一种数据处理装置,所述装置包括:数据获取单元,用于获取车辆的侧倾角速度;数据处理单元,用于基于所述侧倾角速度、预先构建的修正侧倾动力学模型和容积卡尔曼滤波算法,得到车辆侧倾中心的位置,所述修正侧倾动力学模型表征在引入噪声后,所述侧倾角速度和所述车辆侧倾中心的位置的映射关系,且所述修正侧倾动力学模型基于车辆侧倾动力学模型得到,所述车辆侧倾动力学模型表征在理想状态下,所述车辆侧倾时车辆侧倾中心的力矩平衡。
4、第三方面,本申请提供了一种车辆,包括一个或多个处理器以及存储器;一个或多个程序被存储在所述存储器中并被配置为由所述一个或多个处理器执行,所述一个或多个程序配置用于执行上述的方法。
5、第四方面,本申请提供的一种计算机可读存储介质,所述计算机可读存储介质中存储有程序代码,其中,在所述程序代码运行时执行上述的方法。
6、本申请提供的一种数据处理方法、装置、车辆以及存储介质,在获取车辆的侧倾角速度后,基于所述侧倾角速度、预先构建的修正侧倾动力学模型和容积卡尔曼滤波算法,得到车辆侧倾中心的位置。通过上述方式使得,可以基于获取的侧倾角速度、修正侧倾动力学模型和容积卡尔曼老滤波算法,得到车辆侧倾中心的位置,由于修正侧倾动力学模型表征在在引入噪声后,侧倾角速度和车辆侧倾中心的位置的映射关系,因此,可以基于容积卡尔曼滤波对引入噪声后的车辆侧倾中心的位置进行修正,从而可以准确地估计车辆侧倾中心的位置,为车辆的侧倾稳定性控制、车辆侧倾预警等算法提供了更准确的依据。
技术特征:
1.一种数据处理方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取车辆的侧倾角速度之前,还包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述参考状态空间方程和所述噪声,得到所述修正侧倾动力学模型,包括:
4.根据权利要求1所述的方法,其特征在于,所述侧倾角速度有多个,所述基于所述侧倾角速度、预先构建的修正侧倾动力学模型和容积卡尔曼滤波算法,得到车辆侧倾中心的位置,包括:
5.根据权利要求4所述的方法,其特征在于,所述基于所述多个容积点、所述容积卡尔曼滤波算法和所述修正侧倾动力学模型,得到所述车辆侧倾中心的位置,包括:
6.根据权利要求5所述的方法,其特征在于,所述基于所述侧倾角速度、所述侧倾角速度的预测值和所述车辆侧倾中心的预测位置,得到所述车辆侧倾中心的位置,包括:
7.根据权利要求6所述的方法,其特征在于,所述基于所述侧倾角速度、预先构建的修正侧倾动力学模型和容积卡尔曼滤波算法,得到车辆侧倾中心的位置之前,还包括:
8.一种数据处理装置,其特征在于,所述装置包括:
9.一种车辆,其特征在于,包括一个或多个处理器以及存储器;
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有程序代码,其中,在所述程序代码运行时执行权利要求1-7任一所述的方法。
技术总结
本申请实施例公开了一种数据处理方法、装置以及车辆。该方法包括:在获取车辆的侧倾角速度后,基于侧倾角速度、预先构建的修正侧倾动力学模型和容积卡尔曼滤波算法,得到车辆侧倾中心的位置。通过上述方式使得,可以基于获取的侧倾角速度、修正侧倾动力学模型和容积卡尔曼老滤波算法,得到车辆侧倾中心的位置,由于修正侧倾动力学模型表征在在引入噪声后,侧倾角速度和车辆侧倾中心的位置的映射关系,因此,可以基于容积卡尔曼滤波对引入噪声后的车辆侧倾中心的位置进行修正,从而可以准确地估计车辆侧倾中心的位置,为车辆的侧倾稳定性控制、车辆侧倾预警等算法提供了更准确的依据。
技术研发人员:闫艺澎,钟国旗
受保护的技术使用者:广州汽车集团股份有限公司
技术研发日:
技术公布日:2024/6/18
- 还没有人留言评论。精彩留言会获得点赞!