一种车辆感知补盲系统及自动驾驶车辆的制作方法
本发明涉及自动驾驶领域,尤其涉及一种车辆感知补盲系统及自动驾驶车辆。
背景技术:
1、自动驾驶汽车又称无人驾驶汽车,是一种通过电脑系统实现无人驾驶的智能汽车。自动驾驶技术的研发和落地,不仅将带来汽车行业及相关产业链体系的重塑,也会给人们创造更加安全和舒适的出行方式,减少驾驶压力,提高安全性,避免拥堵并降低污染。
2、目前我国自动驾驶技术逐渐成熟,自动驾驶系统主要由感知系统、决策系统和控制系统组成,感知层用于感知外部环境变化、获取相关信息。目前主流的自动驾驶传感器以摄像头和雷达为主,因摄像头和雷达自身视场角度等属性原因,在获取外部环境信息时都存在一定的感知盲区,为降低感知盲区,使得目前高级别自动驾驶传感器配置设备数量很多,导致自动驾驶车辆成本居高不下,影响着自动驾驶技术大规模量产落地应用。
3、因此,亟需一种车辆感知补盲系统及自动驾驶车辆,能够提高传感器设备的感知范围,减少自动驾驶感知设备配置数量,降低自动驾驶传感器硬件配置成本,加快自动驾驶技术落地应用。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种车辆感知补盲系统及自动驾驶车辆。
2、本发明提供了一种车辆感知补盲系统,包括:
3、丝杠,所述丝杠包括沿第一方向延伸的第一丝杠和沿第二方向延伸的第二丝杠,所述第一方向和所述第二方向呈夹角设置,所述丝杠上套设有移动件,所述移动件与所述丝杠螺纹连接;
4、第一连接杆,所述第一连接杆的一端转动连接于所述移动件,另一端转动连接有感知模块,所述感知模块靠近所述丝杠的端面连接有旋转件,所述感知模块能够绕所述旋转件转动;
5、多个第一齿轮和第二齿轮,每个所述丝杠远离所述感知模块的一端均套设有所述第一齿轮,所述第二齿轮与所述第一齿轮啮合;
6、第一驱动电机,所述第一驱动电机的输出端连接于所述第二齿轮,所述第一驱动电机通过所述第一齿轮和所述第二齿轮使所述第一丝杠和所述第二丝杠转动;
7、控制器,所述控制器与所述第一驱动电机电连接。
8、进一步地,所述感知模块包括:
9、壳体,所述壳体包括第一壳体和第二壳体,所述第一壳体能够选择性地与所述第二壳体卡接或分离;
10、硬件设备,所述硬件设备的底壁滑动连接于所述第二壳体,所述硬件设备的侧壁通过第二连接杆于所述第一壳体;
11、第二驱动电机,所述第二驱动电机能够驱动所述第一壳体运动,所述第一壳体远离所述第二壳体时,所述硬件设备沿远离所述第二壳体的方向滑动,所述第一壳体靠近所述第二壳体时,所述硬件设备沿靠近所述第二壳体的方向滑动,所述第二驱动电机与所述控制器电连接。
12、进一步地,所述第一壳体和所述第二壳体的连接处,其中一个设置有凹槽,另一个设置有能够与所述凹槽卡接的凸起,所述第一壳体与第二壳体相互抵接的接触面之间还夹设有压力传感器,所述压力传感器与所述控制器电连接,所述压力传感器压力超过预设值时,所述控制器控制所述第二驱动电机运动,以使带动所述第一壳体运动。
13、进一步地,所述第一壳体的侧壁设有第一滑槽,所述第二连接杆的一端连接于所述硬件设备,另一端连接有第一滑块,所述第一滑块与所述第一滑槽滑动连接。
14、进一步地,所述第二连接杆上开设有第二滑槽,第三连接杆的一端连接于所述第一壳体,另一端连接有第二滑块,所述第二滑块与所述第二滑槽滑动连接。
15、进一步地,所述第二壳体的底部设置有导向滑轨,所述硬件设备连接有导向块,所述导向块与所述导向滑轨滑动连接。
16、进一步地,所述导向块与所述硬件设备之间夹设有紧固组件,所述紧固组件包括支撑板和固定架,所述支撑板上固定有第三丝杠,所述第三丝杠上套设有第三齿轮;所述固定架上固定有第四丝杆,所述第四丝杠与所述第三丝杠呈夹角设置,所述第四丝杠上套设有第四齿轮,所述第三齿轮和所述第四齿轮啮合,所述第三齿轮和所述第四齿轮被限制于相对所述第二壳体移动。
17、进一步地,所述感知模块还包括温度传感器、湿度传感器和风机,所述温度传感器、所述湿度传感器和所述风机均与控制器电连接,所述温度传感器,和/或,所述湿度传感器所测得的所述感知模块内的温度,和/或,湿度超过预设值时,所述控制器驱动所述风机始工作。
18、进一步地,所述丝杠上间隔设置有限位件,以限制所述移动件的移动范围,从而限制所述感知模块的旋转角度。
19、本发明还提供了一种自动驾驶车辆,包括如上所述的车辆感知补盲系统,其中,所述旋转件固定连接于车身,所述丝杠通过所述支撑杆固定于所述车身,所述第一驱动电机固定于所述车身。
20、本发明实施例具有以下技术效果:
21、本实施例提供了一种车辆感知补盲系统,通过第一驱动电机,驱动第二齿轮转动,带动与第二齿轮啮合的第一齿轮转动,第一齿轮带动丝杠转动,从而使丝杠上的移动件延丝杠的延伸方向移动,进而通过第一连接杆,带动感知模块沿旋转件向上或向下旋转,从而增加了感知模块对外界环境的感知视场角,大幅降低了车辆感知盲区,减少了自动驾驶传感器设备数量,进而降低了自动驾驶传感器设备成本。
22、本实施例还提供了一种自动驾驶车辆,在感知设备一定的前提下,大幅增加了对外部环境的感知视场角度,实现了感知系统补盲效果。在一定程度上可降低高级别自动驾驶传感器配置设备数量,降低自动驾驶传感器配置硬件成本,加快了自动驾驶技术商业量产应用。
技术特征:
1.一种车辆感知补盲系统,其特征在于,包括:
2.根据权利要求1所述的车辆感知补盲系统,其特征在于,所述感知模块(3)包括:
3.根据权利要求2所述的车辆感知补盲系统,其特征在于,所述第一壳体(311)和所述第二壳体(312)的连接处,其中一个设置有凹槽,另一个设置有能够与所述凹槽卡接的凸起,所述第一壳体(311)与第二壳体(312)相互抵接的接触面之间还夹设有压力传感器(33),所述压力传感器(33)与所述控制器电连接,所述压力传感器(33)压力超过预设值时,所述控制器控制所述第二驱动电机(52)运动,以使带动所述第一壳体(311)运动。
4.根据权利要求2所述的车辆感知补盲系统,其特征在于,所述第一壳体(311)的侧壁设有第一滑槽,所述第二连接杆(34)的一端连接于所述硬件设备(32),另一端连接有第一滑块,所述第一滑块与所述第一滑槽滑动连接。
5.根据权利要求4所述的车辆感知补盲系统,其特征在于,所述第二连接杆(34)上开设有第二滑槽,第三连接杆(35)的一端连接于所述第一壳体(311),另一端连接有第二滑块,所述第二滑块与所述第二滑槽滑动连接。
6.根据权利要求2所述的车辆感知补盲系统,其特征在于,所述第二壳体(312)的底部设置有导向滑轨(81),所述硬件设备(32)连接有导向块(82),所述导向块(82)与所述导向滑轨(81)滑动连接。
7.根据权利要求6所述的车辆感知补盲系统,其特征在于,所述导向块与所述硬件设备(32)之间夹设有紧固组件,所述紧固组件包括支撑板(91)和固定架(92),所述支撑板(91)上固定有第三丝杠(93),所述第三丝杠(93)上套设有第三齿轮(94);所述固定架(92)上固定有第四丝杆,所述第四丝杠与所述第三丝杠呈夹角设置,所述第四丝杠上套设有第四齿轮(95),所述第三齿轮(94)和所述第四齿轮(95)啮合,所述第三齿轮(94)和所述第四齿轮(95)被限制于相对所述第二壳体(312)移动。
8.根据权利要求2所述的车辆感知补盲系统,其特征在于,所述感知模块还包括温度传感器(61)、湿度传感器(62)和风机(63),所述温度传感器(61)、所述湿度传感器(62)和所述风机(63)均与控制器电连接,所述温度传感器(61),和/或,所述湿度传感器(62)所测得的所述感知模块(3)内的温度,和/或,湿度超过预设值时,所述控制器驱动所述风机(63)始工作。
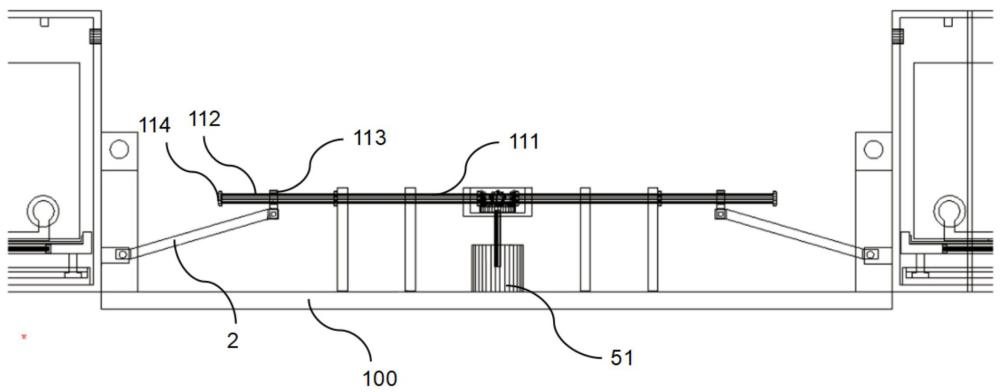
9.根据权利要求1-8任一项所述的车辆感知补盲系统,其特征在于,所述丝杠(1)上间隔设置有限位件(114),以限制所述移动件(113)的移动范围,从而限制所述感知模块(3)的旋转角度。
10.一种自动驾驶车辆,其特征在于,包括如权利要求1-9任一项所述的车辆感知补盲系统,其中,所述旋转件(7)固定连接于车身(100),所述丝杠(1)通过所述支撑杆固定于所述车身(100),所述第一驱动电机(51)固定于所述车身(100)。
技术总结
本发明涉及自动驾驶领域,尤其涉及一种车辆感知补盲系统及自动驾驶车辆,其中车辆感知补盲系统包括丝杠、第一连接杆、感知模块、第一齿轮、第二齿轮以及第一驱动电机和控制器。通过第一驱动电机,驱动第二齿轮转动,带动与第二齿轮啮合的第一齿轮转动,第一齿轮带动丝杠转动,从而使丝杠上的移动件延丝杠的延伸方向移动,进而通过第一连接杆,带动感知模块沿旋转件向上或向下旋转,从而增加了感知模块对外界环境的感知视场角,大幅降低了车辆感知盲区,减少了自动驾驶传感器设备数量,进而降低了自动驾驶传感器设备成本,加快了自动驾驶技术商业量产应用。
技术研发人员:王耀福,赵帅,王凤娇,张庆余,李川鹏,王秀旭,李慧,靳志刚,谢蓉,曲毅博,贺宁宁
受保护的技术使用者:中汽数据(天津)有限公司
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!