适用于坡道制动的车轮防抱死系统及方法与流程
本发明涉及车辆制动,具体地指一种适用于坡道制动的车轮防抱死系统及方法。
背景技术:
1、近年来,车轮防抱死制动系统(anti-lock braking system,简称abs)在汽车行业中得到了广泛的应用和发展。abs是一种通过控制车轮的轮胎与地面之间的摩擦力,防止车轮在制动时出现锁死现象的技术。最早期的制动系统使用的是传统的液压制动系统,但这种系统在急制动时,容易导致车轮锁死,丧失了车辆的操控性和稳定性,增加了事故的风险。为了解决这个问题,汽车制造商开始探索开发一种先进的制动系统,能够有效地防止车轮锁死。车轮防抱死制动系统就应运而生。abs通过使用传感器来监测车轮的转速,一旦发现车轮即将锁死,立即通过液压系统调节制动压力,使车轮保持在最佳的制动效果下。但是目前主流防抱死制动系统都有一个退出控制速度门限值,因此车辆低速行驶在越野坡道低附路面时,车辆稳定性差,易发生侧滑和失控。
2、目前主流车轮防抱死制动系统主要是基于车轮转速、车速以及轮加速度作为控制门限值,为防抱死制动系统工作模式的切换提供依据。但是针对部分低速工况无法起作用,主要原因其无法准确识别车辆低速行驶时的轮速、车速、驾驶员的驾驶意图以及适用于这些工况下的模式切换控制逻辑。
3、当前主流的防抱死制动系统在某一车速门限以下会自动退出控制。然而,对于经常处于越野工况且尤其需要在越野坡道行驶时的车辆来说,车轮防抱死制动系统的研究还不够充分。坡道越野,低速坡道制动时常规abs不会触发,并且越野路附着系数低,所以容易发送车轮抱死。
4、因此,亟需开发能够在低速越野坡道工况下启动的车轮防抱死系统,以弥补常规车轮防抱死系统在该工况下制动时的不足。坡道制动时的车轮防抱死系统通过对车辆低速行驶时车辆的轮速、车速进行估计以及结合驾驶员驾驶意图的识别,再结合用于这些工况下的模式切换控制逻辑,实现了常规车轮防抱死制动系统所不能达到的低速尤其是在坡道制动时对车轮进行的防抱死控制,坡道制动时的车轮防抱死系统能够保证车辆的稳定性,并且同时兼顾制动效能,开发适用于低速制动时的车轮防抱死制动系统,特别是在越野坡道上的应用,成为亟需解决的问题。
技术实现思路
1、本发明的目的就是要提供一种适用于坡道制动的车轮防抱死系统及方法,本发明通过对车辆低速行驶时车辆的轮速、车速进行估算以及结合驾驶员驾驶意图的识别,再结合用于这些工况下的模式切换控制逻辑,实现了常规车轮防抱死制动系统所不能达到的低速尤其是在坡道制动时对车轮进行的防抱死控制。能够保证车辆的稳定性,并且同时兼顾制动效能。
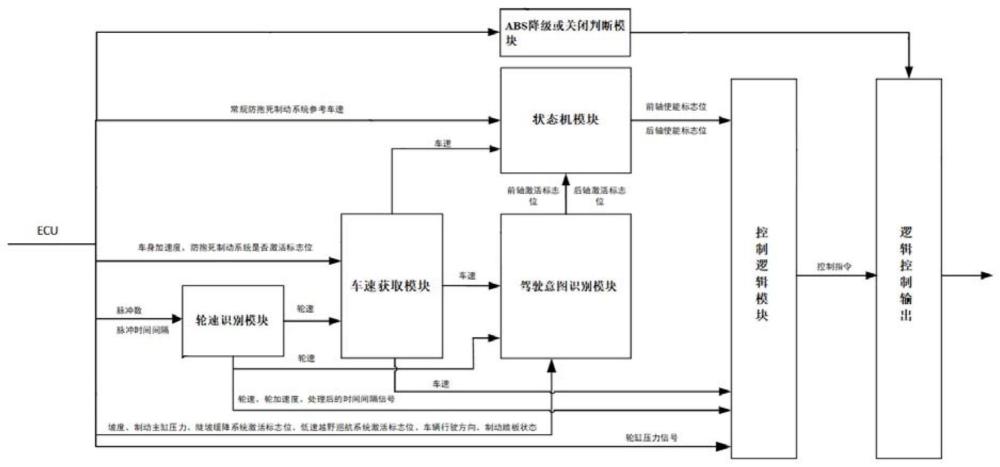
2、为实现此目的,本发明所设计的一种适用于坡道制动的车轮防抱死系统,其特征在于,包括:轮速识别模块用于在坡道工况下识别车辆轮速信号和轮加速度信号;
3、车速获取模块用于根据车辆轮速信号、车身加速度信号和防抱死制动系统激活标志位计算车身速度信号;
4、驾驶意图识别模块用于根据车辆轮速信号、车身速度信号、路面坡道信息、制动主缸压力信息、制动踏板状态信息、车辆行驶方向信息、陡坡缓降激活标志位以及低速越野巡航激活标志位对驾驶意图进行识别,得到前后轴使能标志位;
5、状态机模块用于根据车身速度,常规防抱死制动系统参考车速,以及低速坡道防抱死制动系统进入或退出的预设速度门限值判断低速坡道防抱死制动系统的工作状态为待机或关闭该功能,根据常规防抱死制动系统的激活条件判断常规防抱死制动系统是否激活;状态机模块接收前后轴使能标志位,并在低速坡道防抱死制动系统的工作状态为待机时,将前后轴使能标志位传输给控制逻辑模块;
6、控制逻辑模块用于根据车辆轮速信号、车身速度信号、前后轴使能标志位、陡坡缓降功能激活标志位、低速越野循环功能激活标志位和四轮轮控模式信号获取当前各车轮滑移率和轮缸压力信号,并根据当前各车轮滑移率、轮缸压力信号和轮加速度判断车轮是否存在抱死趋势,并在车轮存在抱死趋势时发出低速坡道防抱死制动系统控制指令。
7、本发明的有益效果:
8、本发明通过对车辆低速行驶时车辆的轮速、车速进行估计以及结合驾驶员驾驶意图的识别,再结合用于这些工况下的模式切换控制逻辑,实现了常规车轮防抱死制动系统所不能达到的低速尤其是在坡道制动时对车轮进行的防抱死控制,相较于在某一较高车速就会退出控制的常规车轮防抱死制动系统而言,在低速越野坡道工况制动的条件下,减少了车轮抱死从而抑制了坡道车辆侧滑现象,保证了其方向稳定性的同时,主要通过未控制的车轴兼顾车辆的制动效能,从而提高了制动时车辆的主动安全性能。
技术特征:
1.一种适用于坡道制动的车轮防抱死系统,其特征在于,包括:轮速识别模块用于在坡道工况下识别车辆轮速信号和轮加速度信号;
2.根据权利要求1所述的适用于坡道制动的车轮防抱死系统,其特征在于,还包括abs降级或关闭判断模块,abs降级或关闭判断模块用于根据车辆故障信息控制车轮防抱死制动系统进行功能降级或功能关闭。
3.根据权利要求2所述的适用于坡道制动的车轮防抱死系统,其特征在于,abs降级或关闭判断模块当接收到底盘域控制器电源过压或欠压故障、紧急制动功能eps失效故障、坡度信号异常、车身加速度信号异常、陡坡缓降功能激活标志位异常和/或低速越野巡航功能激活标志位异常时,控制低速坡道防抱死制动系统功能降级;
4.根据权利要求3所述的适用于坡道制动的车轮防抱死系统,其特征在于,在低速坡道防抱死制动系统功能降级模式下,低速坡道防抱死制动系统的控制器将在备用核中运行依赖最少传感器信号的冗余控制策略;而在低速坡道防抱死制动系统功能关闭模式下,低速坡道防抱死制动系统将退出激活状态。
5.根据权利要求1所述的适用于坡道制动的车轮防抱死系统,其特征在于,在坡道工况下,轮速识别模块接收ecu所发送的每个采样周期轮速传感器脉冲个数信号和轮速传感器脉冲累积时间间隔信号,并利用如下公式计算车辆轮速信号:
6.根据权利要求5所述的适用于坡道制动的车轮防抱死系统,其特征在于,当前周期的轮速为真实车辆轮速信号时,轮速识别模块利用真实车辆轮速信号计算轮加速度信号;
7.根据权利要求1所述的适用于坡道制动的车轮防抱死系统,其特征在于,车速获取模块根据车辆轮速信号、车身加速度信号和防抱死制动系统激活标志位计算车身速度信号的具体方法为:
8.根据权利要求1所述的适用于坡道制动的车轮防抱死系统,其特征在于,驾驶意图识别模块用于根据车辆轮速信号、车身速度信号、路面坡道信息、制动主缸压力信息、制动踏板状态信息、车辆行驶方向信息、陡坡缓降激活标志位以及低速越野巡航激活标志位对驾驶意图进行识别,得到前后轴使能标志位的具体方法为:
9.根据权利要求1所述的适用于坡道制动的车轮防抱死系统,其特征在于,状态机模块判断低速坡道防抱死制动系统的工作状态的具体方法为:当车身速度lsa_vehspd大于低速坡道防抱死制动系统最低退出车速speedlowoff,并且ecu所提供的常规防抱死制动系统参考车速v_veh_x小于等于低速坡道防抱死制动系统最高进入车速speedhighon,则低速坡道防抱死制动系统的工作状态由关闭off切换至待机standby,当车身速度lsa_vehspd小于低速坡道防抱死制动系统最低退出车速speedlowoff或者ecu所提供的常规防抱死制动系统参考车速v_veh_x大于低速坡道防抱死制动系统最高进入车速speedhighon则,低速坡道防抱死制动系统的工作状态由待机standby切换至关闭off。
10.根据权利要求1所述的适用于坡道制动的车轮防抱死系统,其特征在于,控制逻辑模块获取当前各车轮滑移率的具体方法为:
11.根据权利要求1所述的适用于坡道制动的车轮防抱死系统,其特征在于,控制逻辑模块判断车轮抱死趋势,并发出对应低速坡道防抱死制动系统控制指令的具体方法为:
12.一种适用于坡道制动的车轮防抱死方法,其特征在于,包括如下步骤:
13.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求12所述方法的步骤。
14.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求12中所述方法的步骤。
技术总结
本发明公开了适用于坡道制动的车轮防抱死系统,它的轮速识别模块用于识别车辆轮速信号和轮加速度信号;车速获取模块用于计算车身速度信号;驾驶意图识别模块用于得到前后轴使能标志位;状态机模块用于判断低速坡道防抱死制动系统的工作状态为待机或关闭,当低速坡道防抱死制动系统的工作状态为关闭时,启动常规防抱死制动系统;状态机模块接收前后轴使能标志位,并在低速坡道防抱死制动系统的工作状态为待机时,将前后轴使能标志位传输给控制逻辑模块;控制逻辑模块用于在车轮存在抱死趋势时发出低速坡道防抱死制动系统控制指令。本发明实现了常规车轮防抱死制动系统所不能达到的低速尤其是在坡道制动时对车轮进行的防抱死控制。
技术研发人员:刘梓轩,闫涛卫,尹佳超,宋胜
受保护的技术使用者:东风汽车集团股份有限公司
技术研发日:
技术公布日:2024/5/29
- 还没有人留言评论。精彩留言会获得点赞!