车辆的控制方法及装置、计算机设备与流程
本公开涉及车辆,涉及但不限于一种车辆的控制方法及装置、计算机设备、计算机可读存储介质。
背景技术:
1、随着人们生活水平的不断提高,车辆逐渐成为人们日常生活中常见的出行工具。智能驾驶技术的深入发展,使得车辆的智能化程度也越来越高,车辆行驶的安全性问题也日益凸显,其中,车辆的横向稳定性控制是影响车辆行驶安全的重要因素之一。
2、因此,如何更好的控制车辆的横向稳定性,以保证车辆的安全行驶,成为亟待解决的技术问题。
技术实现思路
1、有鉴于此,本公开实施例提供一种车辆的控制方法及装置、计算机设备、计算机可读存储介质。
2、根据本公开实施例的第一方面,提供一种车辆的控制方法,包括:
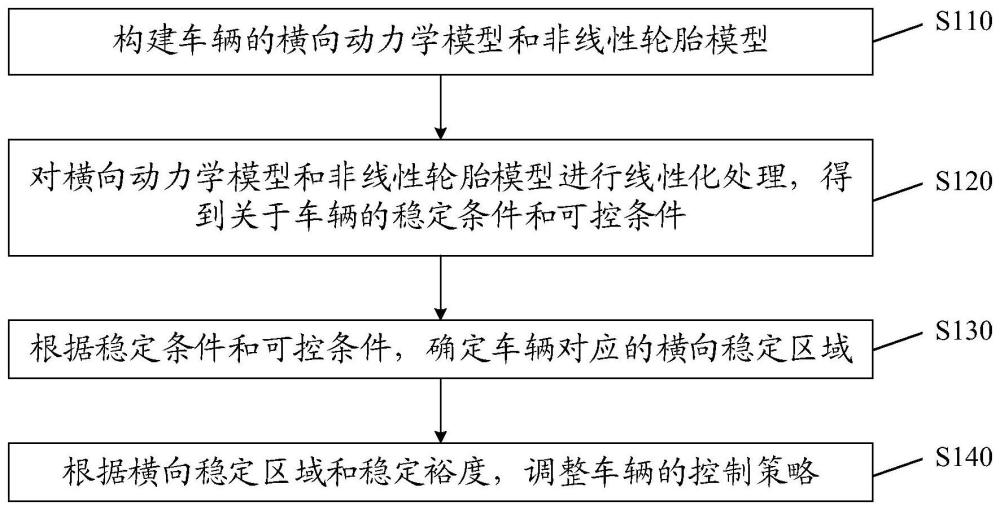
3、构建所述车辆的横向动力学模型和非线性轮胎模型;
4、对所述横向动力学模型和所述非线性轮胎模型进行线性化处理,得到关于所述车辆的稳定条件和可控条件;
5、根据所述稳定条件和所述可控条件,确定所述车辆对应的横向稳定区域;
6、根据所述横向稳定区域和稳定裕度,调整所述车辆的控制策略。
7、在一些实施例中,所述根据所述稳定条件和所述可控条件,确定所述车辆对应的横向稳定区域,包括:
8、根据所述稳定条件和所述可控条件,确定所述车辆对应的稳定边界和可控边界;
9、根据所述稳定边界和可控边界,确定所述横向稳定区域。
10、在一些实施例中,所述根据所述稳定边界和可控边界,确定所述横向稳定区域,包括:
11、对所述稳定边界和可控边界进行拟合,得到拟合稳定边界和拟合可控边界;
12、根据所述拟合稳定边界和拟合可控边界,确定所述横向稳定区域。
13、在一些实施例中,所述根据所述横向稳定区域和稳定裕度,调整所述车辆的控制策略,包括:
14、在所述车辆的行驶轨迹位于所述稳定区域内且所述车辆的行驶轨迹和所述稳定区域之间的偏差达到所述稳定裕度时,启动所述车辆的横向稳定控制。
15、在一些实施例中,所述根据所述横向稳定区域和稳定裕度,调整所述车辆的控制策略,包括:
16、在所述车辆的行驶轨迹位于所述稳定区域内且所述车辆的行驶轨迹和所述稳定区域之间的偏差未达到所述稳定裕度时,关闭所述车辆的横向稳定控制。
17、在一些实施例中,所述横向稳定区域随着所述车辆的状态的改变而改变。
18、在一些实施例中,所述稳定条件和所述可控条件与所述车辆的状态相关;所述根据所述稳定条件和所述可控条件,确定所述车辆对应的横向稳定区域,包括:
19、根据所述车辆当前状态下对应的稳定条件和可控条件,确定所述车辆当前状态下对应的横向稳定区域。
20、根据本公开实施例的第二方面,提供一种车辆的控制装置,包括:
21、模型建立模块,用于构建所述车辆的横向动力学模型和非线性轮胎模型;
22、处理模块,用于对所述横向动力学模型和所述非线性轮胎模型进行线性化处理,得到关于所述车辆的稳定条件和可控条件;
23、确定模块,用于根据所述稳定条件和所述可控条件,确定所述车辆对应的横向稳定区域;
24、调整模块,用于根据所述横向稳定区域和稳定裕度,调整所述车辆的控制策略。
25、根据本公开实施例的第三方面,提供一种计算机设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的可执行指令,所述处理器被配置为执行所述可执行指令时实现如本公开实施例的第一方面中任一实施例所述的控制方法。
26、根据本公开实施例的第四方面,提供一种计算机可读存储介质,所述计算机可读存储介质上存储有可执行指令,所述可执行指令被处理器执行时实现如本公开实施例的第一方面中任一实施例所述的控制方法。
27、本公开实施例中,通过构建车辆的横向动力学模型和非线性轮胎模型,对横向动力学模型和非线性轮胎模型进行线性化处理,得到关于车辆的稳定条件和可控条件,根据稳定条件和可控条件,确定车辆对应的横向稳定区域,根据横向稳定区域和稳定裕度,调整车辆的控制策略。如此,第一方面,可在车辆状态通过稳定边界之前,及时地调整车辆的控制策略,例如,提前启动稳定控制,使得车辆的行驶轨迹始终处于稳定区域内,保证了车辆的安全驾驶;第二方面,通过将车辆的非线性模型进行线性化处理,避免了非线性化模型的缺陷,与相平面法相比具有更为保守的横向稳定区域,可使得车辆状态始终保持在横向稳定区域内。第三方面,可减小极限工况下发生交通事故的概率,保证了驾驶员的安全。
技术特征:
1.一种车辆的控制方法,其特征在于,包括:
2.根据权利要求1所述的控制方法,其特征在于,所述根据所述稳定条件和所述可控条件,确定所述车辆对应的横向稳定区域,包括:
3.根据权利要求2所述的控制方法,其特征在于,所述根据所述稳定边界和可控边界,确定所述横向稳定区域,包括:
4.根据权利要求1所述的控制方法,其特征在于,所述根据所述横向稳定区域和稳定裕度,调整所述车辆的控制策略,包括:
5.根据权利要求1或4所述的控制方法,其特征在于,所述根据所述横向稳定区域和稳定裕度,调整所述车辆的控制策略,包括:
6.根据权利要求1所述的控制方法,其特征在于,所述横向稳定区域随着所述车辆的状态的改变而改变。
7.根据权利要求1或6所述的控制方法,其特征在于,所述稳定条件和所述可控条件与所述车辆的状态相关;所述根据所述稳定条件和所述可控条件,确定所述车辆对应的横向稳定区域,包括:
8.一种车辆的控制装置,其特征在于,包括:
9.一种计算机设备,其特征在于,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的可执行指令,所述处理器被配置为执行所述可执行指令时实现如权利要求1至7中任一项所述的控制方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有可执行指令,所述可执行指令被处理器执行时实现如权利要求1至7中任一项所述的控制方法。
技术总结
本公开实施例提供一种车辆的控制方法及装置、计算机设备、计算机可读存储介质,该控制方法包括:构建车辆的横向动力学模型和非线性轮胎模型;对横向动力学模型和非线性轮胎模型进行线性化处理,得到关于车辆的稳定条件和可控条件;根据稳定条件和可控条件,确定车辆对应的横向稳定区域;根据横向稳定区域和稳定裕度,调整车辆的控制策略。
技术研发人员:孟杨杨,王念,闫涛卫
受保护的技术使用者:东风汽车集团股份有限公司
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!