一种车辆复合制动控制方法、装置、设备及存储介质与流程
本发明涉及车辆制动领域,特别是涉及一种车辆复合制动控制方法、装置、设备及存储介质。
背景技术:
1、制动系统是汽车系统中一个至关重要的组成部分,由供能装置、控制装置、传动装置和制动器等组成,具有使车辆在行驶过程中按照驾驶员要求减速、保持车速及停车的功能,直接关系到汽车的行驶安全和乘坐舒适性。这就要求汽车制动系统在提供足够制动效能的同时也要考虑制动时的方向稳定性和平顺性。汽车上广泛使用的制动系统根据工作介质可分为气压制动和液压制动两种,简称为“气制动”和“液制动”。随着新能源汽车的发展,也随之出现了依靠电机扭矩驱动的“电制动”方式和其与“气制动”、“液制动”相结合的复合制动方式。
2、目前,新能源商用车由于整车及载货重量较大,为保证较高的整车经济性和制动效能,一般均使用“电制动+气制动”的复合制动方式:制动前段仅依靠电制动同步进行能量回收,后段与气压制动叠加制动,abs激活后电制动退出,同时abs调节气制动。但是使用此种制动方式且无制动力分配功能的车辆在附着率较小的湿滑路面上制动时,由于可利用的制动力小,极易出现车轮抱死甩尾、abs激活的情况,此时电制动会立即退出,就会出现车辆前窜、制动不平顺等问题。
技术实现思路
1、为了解决上述问题,本发明的目的是提供一种车辆复合制动控制方法、装置、设备及存储介质,可以使车辆在附着率较小的湿滑路面上制动时,提前降低电制动力,大幅降低车辆甩尾风险及abs激活概率以及极大缓解湿滑路面车辆制动前窜问题。
2、基于此,本发明提供了一种车辆复合制动控制方法,所述方法包括:
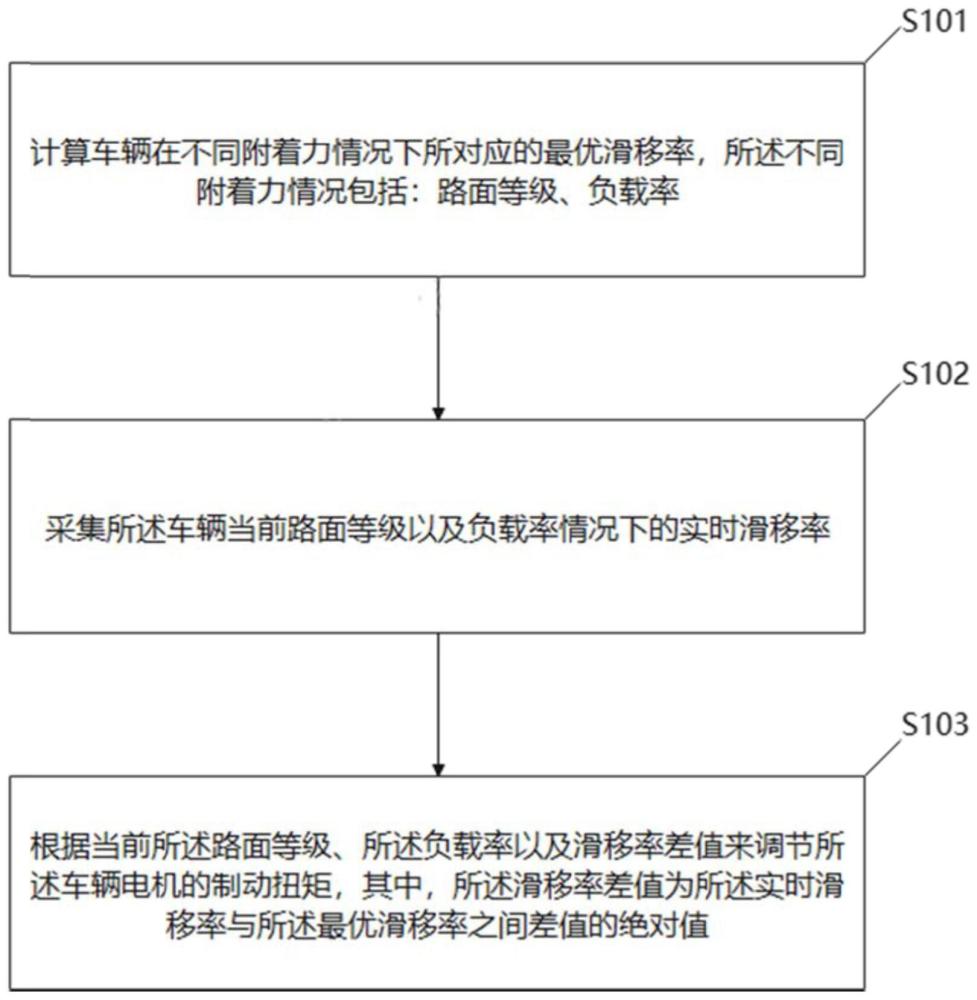
3、计算车辆在不同附着力情况下所对应的最优滑移率,所述不同附着力情况包括:路面等级、负载率;
4、采集所述车辆当前路面等级以及负载率情况下的实时滑移率;
5、根据当前所述路面等级、所述负载率以及滑移率差值来调节所述车辆电机的制动扭矩,其中,所述滑移率差值为所述实时滑移率与所述最优滑移率之间差值的绝对值。
6、其中,所述计算车辆在不同附着力情况下所对应的最优滑移率包括:
7、首先,计算某一负载率的车辆在某一道路等级的道路上行驶时,相同电制动扭矩下不同车速的滑移率;
8、其次,在某一路面等级的路面以某一负载率行驶的车辆所对应的最优滑移率为在不同电制动扭矩下所述滑移率求和后的平均值。
9、其中,所述方法还包括:改变所述道路等级、所述负载率以及所述电制动扭矩来获取不同负载率的所述车辆在不同道路等级的道路上行驶时,在不同电制动扭矩情况下不同车速所对应的滑移率。
10、其中,所述计算某一负载率的车辆在某一道路等级的道路上行驶时,相同电制动扭矩下不同车速的滑移率包括:
11、
12、其中,所述sliprate_v代表所述滑移率,所述vrearleft代表所述车辆左后方车轮的轮速,所述vrearright代表所述车辆右后方车轮的轮速,所述vfrontright代表所述车辆右前方车轮的轮速,所述vfrontleft代表所述车辆左前方车轮的轮速,所述max函数为求取最大值。
13、其中,所述根据路面等级、负载率以及滑移率差值来调节所述车辆电机的制动扭矩包括:
14、当所述车辆状态处于制动模式且所述滑移率差值大于根据路面等级、负载率设定的阈值时,执行制动降扭控制。
15、其中,所述执行制动降扭控制包括:
16、在当前路面等级以及负载率下,将当前所述车辆电机响应的电机制动扭矩与和制动踏板开度所对应的踏板制动扭矩进行比较,获取所述电机制动扭矩与所述踏板制定扭矩之间的最小值,并锁定所述最小值所对应的扭矩作为响应电制动扭矩;
17、获取所述降扭系数,并将所述降扭系数进行锁定;
18、将所述响应电制动扭矩与所述降扭系数相乘来获取目标电制动扭矩。
19、其中,所述降扭系数的获取过程包括:
20、读取当前的所述滑移率差值和电机转速进行查表来获取在当前路面等级以及负载率下所对应的降扭系数。
21、本发明还提供了一种车辆复合制动控制的装置,所述装置包括:
22、计算模块,用于计算车辆在不同附着力情况下所对应的最优滑移率,所述不同附着力情况包括:路面等级、负载率;
23、采集模块,用于采集所述车辆当前情况下的实时滑移率;
24、调节模块,用于根据所述路面等级、所述负载率以及滑移率差值来调节所述车辆电机的制动扭矩,其中,所述滑移率差值为所述实时滑移率与所述最优滑移率之间差值的绝对值。
25、本发明还提供了一种车辆复合制动控制的设备,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现上述车辆复合制动控制方法。
26、本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行上述车辆复合制动控制方法。
27、在本发明中,首先,计算车辆在不同附着力情况下所对应的最优滑移率,所述不同附着力情况包括:路面等级、负载率;其次,采集所述车辆当前路面等级以及负载率情况下的实时滑移率;最后,根据当前所述路面等级、所述负载率以及滑移率差值来调节所述车辆电机的制动扭矩,其中,所述滑移率差值为所述实时滑移率与所述最优滑移率之间差值的绝对值。本发明使得采用“电制动+气制动”的复合制动方式且无制动力分配功能的车辆在附着率较小的湿滑路面上制动时,提前降低电制动力,大幅降低车辆甩尾风险及abs激活概率,极大缓解湿滑路面车辆制动前窜问题。
技术特征:
1.一种车辆复合制动控制方法,其特征在于,包括:
2.如权利要求1所述的车辆复合制动控制方法,其特征在于,所述计算车辆在不同附着力情况下所对应的最优滑移率包括:
3.如权利要求2所述的车辆复合制动控制方法,其特征在于,所述方法还包括:改变所述道路等级、所述负载率以及所述电制动扭矩来获取不同负载率的所述车辆在不同道路等级的道路上行驶时,在不同电制动扭矩情况下不同车速所对应的滑移率。
4.如权利要求2所述的车辆复合制动控制方法,其特征在于,所述计算某一负载率的车辆在某一道路等级的道路上行驶时,相同电制动扭矩下不同车速的滑移率包括:
5.如权利要求1所述的车辆复合制动控制方法,其特征在于,所述根据路面等级、负载率以及滑移率差值来调节所述车辆电机的制动扭矩包括:
6.如权利要求5所述的车辆复合制动控制方法,其特征在于,所述执行制动降扭控制包括:
7.如权利要求6所述的车辆复合制动控制方法,其特征在于,所述降扭系数的获取过程包括:
8.一种车辆复合制动控制的装置,其特征在于,包括:
9.一种车辆复合制动控制的设备,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1至7中任意一项所述车辆复合制动控制方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行如权利要求1至7中任意一项所述车辆复合制动控制方法。
技术总结
本发明公开了一种车辆复合制动控制方法、装置、设备及存储介质,所述方法包括:计算车辆在不同附着力情况下所对应的最优滑移率,所述不同附着力情况包括:路面等级、负载率;采集所述车辆当前路面等级以及负载率情况下的实时滑移率;根据当前所述路面等级、所述负载率以及滑移率差值来调节所述车辆电机的制动扭矩,其中,所述滑移率差值为所述实时滑移率与所述最优滑移率之间差值的绝对值。采用本发明,可以使车辆在附着率较小的湿滑路面上制动时,提前降低电制动力,大幅降低车辆甩尾风险及ABS激活概率以及极大缓解湿滑路面车辆制动前窜问题。
技术研发人员:郑森,张强,贾龙飞,刘小伟,郭潇然
受保护的技术使用者:宇通轻型商用汽车有限公司
技术研发日:
技术公布日:2024/6/11
- 还没有人留言评论。精彩留言会获得点赞!