一种横向功能扭矩变化速率控制系统及方法与流程
本发明属于车辆控制,尤其涉及一种横向功能扭矩变化速率控制系统及方法。
背景技术:
1、车辆转向力矩是汽车操纵稳定性评价中的重要指标,其中方向盘力矩波动更是直接影响驾驶员乘车感受和安全性的重要指标,因此转向系统的力矩波动对转向系统设计而言意义非凡,同时智能驾驶横向控制中方向盘扭矩波动所带来的影响也是不言而喻的;横向功能扭矩主要来源于以下几个方面:转向输入:驾驶员转动方向盘时产生的力矩,使车轮产生侧向力,从而使车辆进行转弯;侧向风载荷:高速行驶过程中遇到的侧风会对车辆产生横向力矩,影响车辆直线行驶的稳定性;路面附着条件与轮胎摩擦力:当车辆转弯时,轮胎与路面之间的摩擦力会产生抵抗车辆侧倾和滑动的横向力矩;电子稳定程序干预:esp系统在检测到车辆有侧滑趋势时,通过制动个别车轮或调整发动机输出扭矩来施加一个纠正横向动态失稳的力矩;悬挂系统的几何特性:悬挂系统的设计(如外倾角、束角等几何参数)也会影响车辆在转弯时的横向力矩分布,在现代汽车的操控性设计中,合理管理和控制这些横向扭矩是提高驾驶安全性和乘坐舒适度的关键因素之一。
2、现有技术方案是通过前视摄像头识别前方道路左右车道线相关参数和置信度信息,当左右车道线有效时,根据左右车道线拟合车道中心进行横向控制,输出控制扭矩。但在颠簸路段或者弯道工况下,因机器横向控制的局限性,往往会带来横向控制扭矩的波动,从而导致方向盘抖动,严重情况下导致车辆失控。一定程度上给驾驶员带来功能使用的不适和安全风险。
技术实现思路
1、本发明的目的在于提供一种横向功能扭矩变化速率控制系统,旨在解决在颠簸路段或者弯道工况下,因机器横向控制的局限性,往往会带来横向控制扭矩的波动,从而导致方向盘抖动,严重情况下导致车辆失控。一定程度上给驾驶员带来功能使用的不适和安全风险的问题。
2、本发明是这样实现的,一种横向功能扭矩变化速率控制系统,所述系统包括感知单元、车辆参数单元、计算单元和横向控制单元,所述感知单元用于采集车道线信息,所述感知单元与车辆参数单元连接,车辆参数单元用于采集车速信息、道路颠簸信息和方向盘扭矩,车辆参数单元与计算单元连接,计算单元用于横向控制所需扭矩值以及当前车道的曲率半径,横向控制单元与计算单元连接,用于对车辆进行横向控制。
3、优选的,所述感知单元包括摄像头,通过摄像头对道路进行图像采集,识别道路的车道线,并判定车道线的有效性。
4、优选的,所述车辆参数单元包括esp传感器和轮速传感器,所述esp传感器用于采集车辆车速信息以及方向盘的扭矩值,所述轮速传感器用于获取车辆轮胎波动频率和波动振幅。
5、本发明的另一目的在于提供一种横向功能扭矩变化速率控制方法,应用于如上所述的横向功能扭矩变化速率控制系统,所述方法包括:
6、采集车道线信息并获取车道线三次多项式参数,所述车道线三次多项式参数至少包括左侧车道线、左侧车道线置信度、右侧车道线以及右侧车道线置信度;
7、采集车辆轮胎波动频率以及波动振幅,识别道路是否颠簸;
8、识别车道曲率半径,判定车道是否为弯道;
9、根据道路状态输出对应的横向功能扭矩变化速率和扭矩低通滤波器系数。
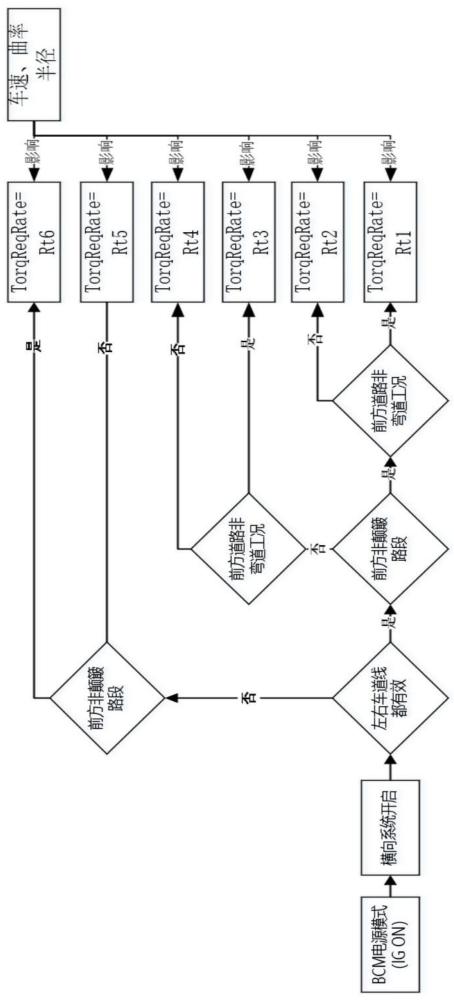
10、优选的,当前方道路有效、道路未出现颠簸并且道路为非弯道工况时,横向功能扭矩变化速率输出值为rt1,扭矩低通滤波器系数输出值为t1。
11、优选的,当前方道路有效、道路未出现颠簸并且道路为弯道工况时,横向功能扭矩变化速率输出值为rt2,扭矩低通滤波器系数输出值为t2。
12、优选的,当前方道路有效、道路出现颠簸并且道路为非弯道工况时,横向功能扭矩变化速率输出值为rt3,扭矩低通滤波器系数输出值为t3。
13、优选的,当前方道路有效、道路出现颠簸并且道路为弯道工况时,横向功能扭矩变化速率输出值为rt4,扭矩低通滤波器系数输出值为t4。
14、优选的,当前方道路无效且道路出现颠簸时,横向功能扭矩变化速率输出值为rt5,扭矩低通滤波器系数输出值为t5。
15、优选的,当前方道路无效且道路未出现颠簸时,横向功能扭矩变化速率输出值为rt6,扭矩低通滤波器系数输出值为t6。
16、本发明提供的横向功能扭矩变化速率控制系统,可根据车辆前方道路状况、路况颠簸状况以及车道弯曲状况,判断计算得出横向控制扭矩的变化速率即扭矩低通滤波器系数,通过控制上述两个参数,可使车辆在经过颠簸路段或者弯道时,车辆更加稳定,降低出现方向盘剧烈晃动的情况的发生,提成横向控制功能使用的舒适性和安全性。
技术特征:
1.一种横向功能扭矩变化速率控制系统,其特征在于,所述系统包括感知单元、车辆参数单元、计算单元和横向控制单元,所述感知单元用于采集车道线信息,所述感知单元与车辆参数单元连接,车辆参数单元用于采集车速信息、道路颠簸信息和方向盘扭矩,车辆参数单元与计算单元连接,计算单元用于横向控制所需扭矩值以及当前车道的曲率半径,横向控制单元与计算单元连接,用于对车辆进行横向控制。
2.根据权利要求1所述的横向功能扭矩变化速率控制系统,其特征在于,所述感知单元包括摄像头,通过摄像头对道路进行图像采集,识别道路的车道线,并判定车道线的有效性。
3.根据权利要求1所述的横向功能扭矩变化速率控制系统,其特征在于,所述车辆参数单元包括esp传感器和轮速传感器,所述esp传感器用于采集车辆车速信息以及方向盘的扭矩值,所述轮速传感器用于获取车辆轮胎波动频率和波动振幅。
4.一种横向功能扭矩变化速率控制方法,其特征在于,应用于如权利要求1-3任一所述的横向功能扭矩变化速率控制系统,所述方法包括:
5.根据权利要求4所述的横向功能扭矩变化速率控制方法,其特征在于,当前方道路有效、道路未出现颠簸并且道路为非弯道工况时,横向功能扭矩变化速率输出值为rt1,扭矩低通滤波器系数输出值为t1。
6.根据权利要求4所述的横向功能扭矩变化速率控制方法,其特征在于,当前方道路有效、道路未出现颠簸并且道路为弯道工况时,横向功能扭矩变化速率输出值为rt2,扭矩低通滤波器系数输出值为t2。
7.根据权利要求4所述的横向功能扭矩变化速率控制方法,其特征在于,当前方道路有效、道路出现颠簸并且道路为非弯道工况时,横向功能扭矩变化速率输出值为rt3,扭矩低通滤波器系数输出值为t3。
8.根据权利要求4所述的横向功能扭矩变化速率控制方法,其特征在于,当前方道路有效、道路出现颠簸并且道路为弯道工况时,横向功能扭矩变化速率输出值为rt4,扭矩低通滤波器系数输出值为t4。
9.根据权利要求4所述的横向功能扭矩变化速率控制方法,其特征在于,当前方道路无效且道路出现颠簸时,横向功能扭矩变化速率输出值为rt5,扭矩低通滤波器系数输出值为t5。
10.根据权利要求4所述的横向功能扭矩变化速率控制方法,其特征在于,当前方道路无效且道路未出现颠簸时,横向功能扭矩变化速率输出值为rt6,扭矩低通滤波器系数输出值为t6。
技术总结
本发明适用于车辆控制技术领域,尤其涉及一种横向功能扭矩变化速率控制系统及方法,所述系统包括感知单元、车辆参数单元、计算单元和横向控制单元,所述感知单元用于采集车道线信息,车辆参数单元用于采集车速信息、道路颠簸信息和方向盘扭矩,计算单元用于横向控制所需扭矩值以及当前车道的曲率半径,横向控制单元与计算单元连接,用于对车辆进行横向控制。本发明根据车辆前方道路状况、路况颠簸状况以及车道弯曲状况,判断计算得出横向控制扭矩的变化速率即扭矩低通滤波器系数,通过控制上述两个参数,可使车辆在经过颠簸路段或者弯道时,车辆更加稳定,降低出现方向盘剧烈晃动的情况的发生,提升横向控制功能使用的舒适性和安全性。
技术研发人员:张洪亮,吴子强,王溪
受保护的技术使用者:阿尔特汽车技术股份有限公司
技术研发日:
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!