矿车领航系统、矿车领航系统的控制方法和装置与流程
本申请涉及矿车控制,具体而言,涉及一种矿车领航系统、矿车领航系统的控制方法和装置。
背景技术:
1、露天矿大型载重卡车由于车体庞大、存在视觉盲区、运输道路起伏多变,弯道及斜坡道交织,作业条件恶劣,多年来车辆行车事故时有发生。
2、目前卡车防撞基本依赖二种传感器感知避障,一种是雷达:即毫米波雷达和激光雷达。毫米波雷达有一定的扇形发射角度,雷达波直射到道路挡墙和斜坡道时报警频繁。而激光雷达的不足是遇到灰尘后测距功能失真。另一种是图像识别传感器,通过ai算法,对前方障碍物进行识别,判断有无障碍物以及障碍物的类型。图像识别受ai算法的优劣影响和场景图片的学习相关,没有出现的场景就学不到,一旦事故中出现新场景,ai识别就无所适从,判断失败。
3、这两种传感器都是安装在卡车车体的前端位置,都是为了发现卡车前方有无障碍物。传感器一旦故障或弯道转弯半径小,前方弯道视线盲区大,或矿山临时工程穿过挡墙,都面临传感器不能拐弯,射线不能拐弯的问题。因此,目前的传感器无法检测矿卡视觉盲区,导致矿车行走过程中的安全性较差。
技术实现思路
1、本申请的主要目的在于提供一种矿车领航系统、矿车领航系统的控制方法和装置,以至少解决现有技术中传感器无法检测矿卡视觉盲区,导致矿车行走过程中的安全性较差的问题。
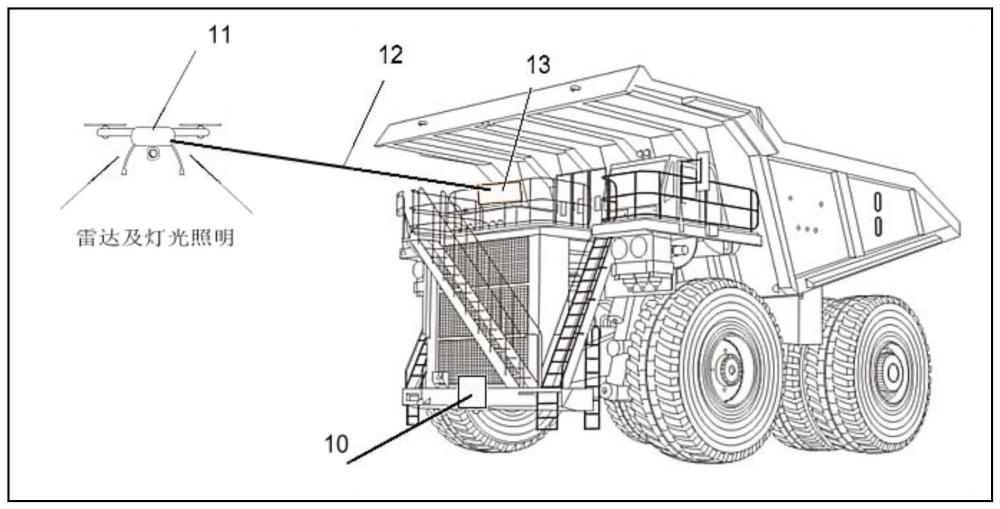
2、为了实现上述目的,根据本申请的一个方面,提供了一种矿车领航系统,包括:矿车,用于在矿区中运输货物;无人机,与所述矿车通信连接,所述无人机在所述矿车的行进方向飞行,所述无人机与所述矿车之间的距离大于或者等于预设距离,所述矿车和所述无人机分别按照预定行驶路线行驶;控制器,分别与所述矿车和所述无人机通信连接,所述控制器用于在所述环境数据异常的情况下控制所述矿车刹车,并控制所述无人机归位或暂停飞行,其中,所述环境数据异常包括所述矿车即将发生碰撞。
3、可选地,所述矿车还包括:停留平台,用于存放所述无人机;第一定位设备,用于定位所述矿车的位置;第一传感器,用于检测所述矿车行进方向的第一环境数据;显示屏,用于显示所述第一环境数据和所述无人机检测到的所述环境数据。
4、可选地,所述无人机还包括:第二定位设备,用于定位所述无人机的位置;第二传感器,用于检测所述无人机前方扫描得到的第二环境数据;照明设备,用于为所述矿车照明。
5、根据本申请的另一方面,提供了一种任意一种所述的矿车领航系统的控制方法,所述方法包括:获取所述无人机采集到的所述环境数据;根据所述环境数据确定所述矿车是否会发生碰撞;在确定所述矿车会发生碰撞的情况下,控制所述矿车刹车,并控制所述无人机暂停飞行。
6、可选地,在获取所述无人机采集到的所述环境数据之前,所述方法还包括:获取所述矿车的车辆速度;获取所述矿车的刹车距离;根据所述车辆速度和所述刹车距离,确定所述无人机的飞行速度和超前距离,其中,所述超前距离是所述无人机与所述矿车之间的距离,所述超前距离大于或者等于所述刹车距离。
7、可选地,在获取所述无人机采集到的所述环境数据之前,所述方法还包括:获取预定行驶路线,其中,所述预定行驶路线是预先配置的从始发地到目的地之间最优道路的线路;控制所述矿车和所述无人机的所述预定行驶路线行驶。
8、可选地,所述矿车还包括停留平台和第一定位设备,所述停留平台用于存放所述无人机,所述第一定位设备用于定位所述矿车的位置,在获取所述无人机采集到的所述环境数据之前,所述方法还包括:获取所述矿车的位置;根据所述矿车的位置和所述行驶路线,确定所述矿车的行进方向;在行进方向为直线行驶的情况下,控制所述无人机停留在所述停留平台;在行进方向为弯道行驶和/或所述矿车处于危险区域的情况下,控制所述无人机在所述矿车的行进方向飞行,其中,所述危险区域为有沟壑和/或黑暗的区域。
9、可选地,所述无人机还包括照明设备,所述照明设备用于为所述矿车照明,在获取所述无人机采集到的所述环境数据之前,所述方法还包括:在行进方向为弯道行驶和/或所述矿车处于所述危险区域的情况下,控制所述照明设备开启;在当前时间处于目标时间段的情况下,控制所述照明设备开启。
10、可选地,根据所述环境数据确定所述矿车是否会发生碰撞,包括:在所述无人机与目标对象之间的距离小于距离阈值的情况下,确定所述矿车会发生碰撞,其中,所述目标对象包括行人、墙体、矿用车辆中的一个或者多个;在所述无人机与目标对象之间的距离大于或者等于所述距离阈值的情况下,确定所述矿车不会发生碰撞。
11、根据本申请的再一方面,提供了一种任意一种所述的矿车领航系统的控制装置,所述装置包括:第一获取单元,用于获取所述无人机采集到的所述环境数据;第一确定单元,用于根据所述环境数据确定所述矿车是否会发生碰撞;第一控制单元,用于在确定所述矿车会发生碰撞的情况下,控制所述矿车刹车,并控制所述无人机暂停飞行。
12、应用本申请的技术方案,为了实现卡车防撞,采用无人机引车领航,那些视觉盲区的障碍物,可以由无人机超前飞行,由无人机上的雷达扫描首先发现障碍物,然后将信息传给矿车,这样就可以超前排除或处理道路上的隐患,实现卡车安全运行。
技术特征:
1.一种矿车领航系统,其特征在于,包括:
2.根据权利要求1所述的矿车领航系统,其特征在于,所述矿车还包括:
3.根据权利要求1所述的矿车领航系统,其特征在于,所述无人机还包括:
4.一种权利要求1至3中任意一项所述的矿车领航系统的控制方法,其特征在于,所述方法包括:
5.根据权利要求4所述的方法,其特征在于,在获取所述无人机采集到的所述环境数据之前,所述方法还包括:
6.根据权利要求4所述的方法,其特征在于,在获取所述无人机采集到的所述环境数据之前,所述方法还包括:
7.根据权利要求6所述的方法,其特征在于,所述矿车还包括停留平台和第一定位设备,所述停留平台用于存放所述无人机,所述第一定位设备用于定位所述矿车的位置,在获取所述无人机采集到的所述环境数据之前,所述方法还包括:
8.根据权利要求7所述的方法,其特征在于,所述无人机还包括照明设备,所述照明设备用于为所述矿车照明,在获取所述无人机采集到的所述环境数据之前,所述方法还包括:
9.根据权利要求4所述的方法,其特征在于,根据所述环境数据确定所述矿车是否会发生碰撞,包括:
10.一种权利要求1至3中任意一项所述的矿车领航系统的控制装置,其特征在于,所述装置包括:
技术总结
本申请提供了一种矿车领航系统、矿车领航系统的控制方法和装置。该系统包括:矿车,用于在矿区中运输货物;无人机,与矿车通信连接,无人机在矿车的行进方向飞行,无人机与矿车之间的距离大于或者等于预设距离,无人机用于检测矿车行进方向的环境数据;控制器,分别与矿车和无人机通信连接,控制器用于在环境数据异常的情况下控制矿车刹车,并控制无人机暂停飞行,其中,环境数据异常包括矿车即将发生碰撞。本方案中为了实现卡车防撞,采用无人机引车领航,那些视觉盲区的障碍物,可以由无人机超前飞行,由无人机上的雷达扫描首先发现障碍物,然后将信息传给矿车,这样就可以超前排除或处理道路上的隐患,实现卡车安全运行。
技术研发人员:杨燕飞,李福平,张丽英,苏浩宇,黄国君
受保护的技术使用者:神华准格尔能源有限责任公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!