自适应减震的机器人智能移动底座
本发明涉及智能机器人,尤其涉及自适应减震的机器人智能移动底座。
背景技术:
1、转运机器人是一种能够自动或半自动地从一个地方转移到另一个地方的机器人,这种机器人通常用于物流、生产线、机场行李运输等领域,其主要功能是搬运物品,从起始位置将物品运输到目标位置,并且通过配备传感器、控制器和执行器等设备实现自主的搬运,或者通过人工控制实现物品的搬运;
2、目前转运机器人在物品的搬运过程中,当通过一些坑洼路面时会产生较大的颠簸,而且设于其底座上的减震系统无法根据路面的情况而相应的调整(悬挂避震越软,减震效果越好,反之则越差),尤其是在搬运一些易碎品时,转运机器人底座减震系统的灵活性、智能性直接决定能否将搬运的物品安全、完好的运输至目标位置,在实际转运过程中上述问题主要体现在以下情况:
3、悬挂避震越软虽然具有较好的减震效果,但是当机器人在平坦路面快速行驶时,较软的悬挂避震致使机器人侧向支撑性能大大降低,不利于机器人的行驶稳定性,若悬挂避震设置的较硬一些,虽然获得了较好的行驶稳定性,但是行驶在颠簸路面时,无法实现对震动较好的过滤,致使所搬运物品受较大震动而破损;
4、鉴于此,本申请提供自适应减震的机器人智能移动底座以解决上述问题。
技术实现思路
1、本发明提供自适应减震的机器人智能移动底座,该底座可根据所行驶路面的路况实时且相应的调整底座的减震强度,以满足在确保转运物品安全的情况下,实现高效率的转运过程,以缩短转运时间(提高工作效率),另外,在转运过程中还可根据底座的震动幅度大小而相应的调整施加在转运物品上的约束预紧力,在确保转运物品稳固的情况下,尽可能的避免约束预紧力对物品造成不必要的损伤。
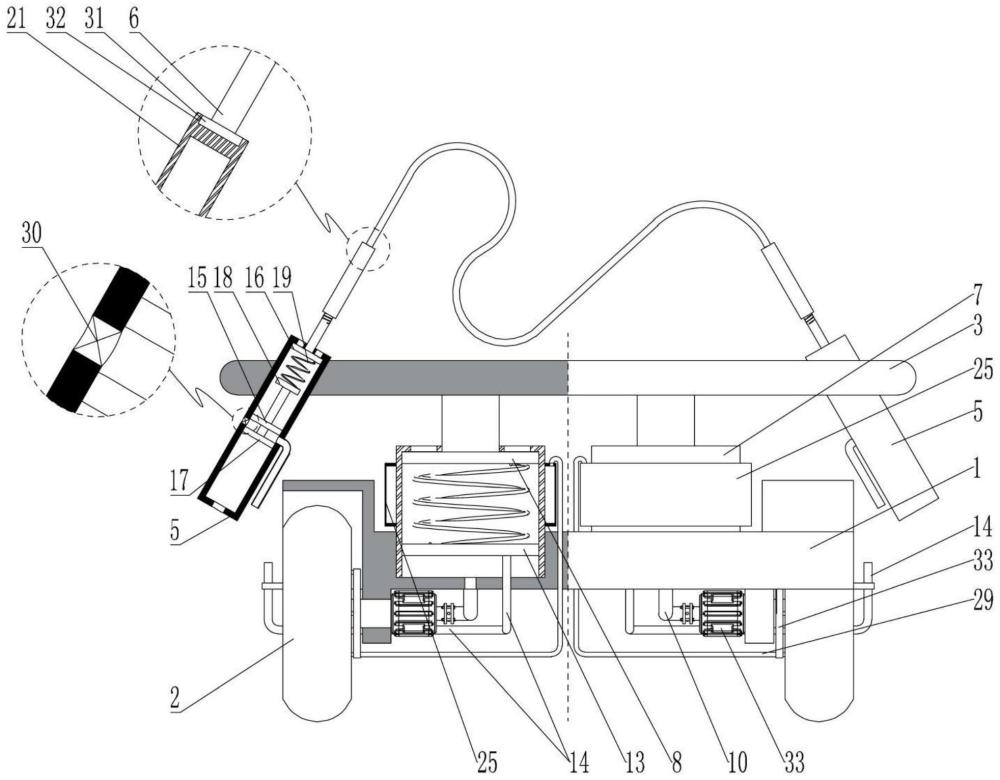
2、自适应减震的机器人智能移动底座,包括车架且车架上设有行走轮,其特征在于,所述车架上设有承载板且承载板、车架之间连接有减震组件,所述行走轮外圆周面上套装有环形囊体且环形囊体连通有设于车架上的流体存储组件,所述流体存储组件、减震组件相配合实现调整减震组件的阻尼强度,所述流体存储组件、减震组件与行走轮数量相对应;
3、所述承载板上间隔设有两组自适应约束件,所述自适应约束件包括设于承载板两侧且相对应的承载筒,所述承载筒内设有紧固组件且相配合的两紧固组件之间由索绳实现连接,所述紧固组件和与之对应的减震组件连接,当承载板在竖向晃动时通过减震组件带动紧固组件动作并且使得连接于两紧固组件之间的索绳进一步收紧;
4、所述车架上设有震动监测仪且震动监测仪连接有微控制器,所述微控制器控制流体存储组件工作。
5、上述技术方案有益效果在于:
6、(1)在本方案中,该底座可根据所行驶路面的路况实时且相应的调整底座的减震强度,以满足在确保转运物品安全的情况下,实现高效率的转运过程,以缩短转运时间(提高工作效率);
7、(2)本方案中的底座在转运过程中还可根据其自身的震动幅度大小而相应的调整施加在转运物品上的约束预紧力,在确保转运物品稳固的情况下,尽可能的避免约束预紧力对物品造成不必要的损伤。
技术特征:
1.自适应减震的机器人智能移动底座,包括车架(1)且车架(1)上设有行走轮(2),其特征在于,所述车架(1)上设有承载板(3)且承载板(3)、车架(1)之间连接有减震组件,所述行走轮(2)外圆周面上套装有环形囊体(4)且环形囊体(4)连通有设于车架(1)上的流体存储组件,所述流体存储组件、减震组件相配合实现调整减震组件的阻尼强度,所述流体存储组件、减震组件与行走轮(2)数量相对应;
2.根据权利要求1所述的自适应减震的机器人智能移动底座,其特征在于,所述减震组件包括设于车架(1)上的阻尼筒(7)且阻尼筒(7)内设有阻尼活塞(8),所述流体存储组件设于阻尼筒(7)内且位于阻尼活塞(8)下方,所述阻尼活塞(8)、流体存储组件之间设有阻尼弹簧(9)且阻尼活塞(8)与承载板(3)连接;
3.根据权利要求2所述的自适应减震的机器人智能移动底座,其特征在于,所述行走轮(2)内同轴心设有过渡腔(12)且过渡腔(12)和环形囊体(4)连通,所述过渡腔(12)经第一旋转连通件与控制管(10)连通;
4.根据权利要求3所述的自适应减震的机器人智能移动底座,其特征在于,所述调节活塞(13)上设有向下延伸出阻尼筒(7)的单向管(14)且单向管(14)和位于调节活塞(13)上方的阻尼筒(7)连通,所述单向管(14)另一端和紧固组件连通;
5.根据权利要求4所述的自适应减震的机器人智能移动底座,其特征在于,所述承载筒(5)内设有隔板(15)且经隔板(15)分为两腔体,紧固组件包括:位于隔板(15)上方的腔体内滑动有约束板(16)且约束板(16)连接有置于承载筒(5)外的伸缩组件,所述索绳(6)与伸缩组件连接;
6.根据权利要求5所述的自适应减震的机器人智能移动底座,其特征在于,所述伸缩组件包括与约束板(16)同轴心连接且向外伸出承载筒(5)的调节杆(20),所述调节杆(20)向外伸出一端设有螺纹且配合有内螺纹筒(21),所述内螺纹筒(21)和索绳(6)之间转动连接。
7.根据权利要求1-6任一所述的自适应减震的机器人智能移动底座,其特征在于,所述行走轮(2)内同轴心设有调节腔(35)且调节腔(35)内沿径向滑动安装有磁体(22),所述磁体(22)连接有设于调节腔(35)内的控制组件,所述流体存储组件内存储有磁流变液。
8.根据权利要求7所述的自适应减震的机器人智能移动底座,其特征在于,所述控制组件包括设于调节腔(35)内的控制腔(23)且控制腔(23)内设有与之弹性连接控制活塞(24),所述控制活塞(24)驱动与之对应的磁体(22);
9.根据权利要求8所述的自适应减震的机器人智能移动底座,其特征在于,所述气体组件包括套装于阻尼筒(7)外壁的储液筒(25)且储液筒(25)内存储有适量的二氧化碳溶液,所述储液筒(25)上端和与之对应行走轮(2)内的若干控制腔(23)连通。
10.根据权利要求9所述的自适应减震的机器人智能移动底座,其特征在于,若干所述控制腔(23)连通有置于行走轮(2)外的第二旋转连通件且第二旋转连通件和储液筒(25)上端连通。
技术总结
本发明涉及自适应减震的机器人智能移动底座,本发明有效解决了目前机器人底座减震系统功能单一且无法满足在转运一些易碎品物件时使用需求的问题,解决问题的方案包括车架且车架上设有承载板,承载板、车架之间设有减震组件,还包括与之配合的流体存储组件以及设置于承载板上的自适应约束组件;本方案中的底座可根据所行驶路面的路况实时且相应的调整底座的减震强度,以满足在确保转运物品安全的情况下,实现高效率的转运过程,以缩短转运时间(提高工作效率),另外,在转运过程中还可根据底座的震动幅度大小而相应的调整施加在转运物品上的约束预紧力,在确保转运物品稳固的情况下,尽可能的避免约束预紧力对物品造成不必要的损伤。
技术研发人员:王子璇,张振源,李磊,虞跨海,李宏林
受保护的技术使用者:重庆大学
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!