一种车辆控制方法、系统、存储介质及车辆与流程
本申请涉及车辆,具体而言,涉及一种车辆控制方法、系统、存储介质及车辆。
背景技术:
1、随着社会的发展,车辆的行驶安全也面临着复杂行驶环境的严峻考验,尤其是在夜晚等光线不足的环境下,驾驶员更加难以对突发状况作出适当反应。
技术实现思路
1、基于此,本申请提供了一种车辆控制方法、系统、存储介质及车辆,以解决如何保障车辆夜间行驶安全的问题。
2、本申请实施例的第一方面,提供了一种车辆控制方法,所述方法应用于第一车辆,所述方法包括:
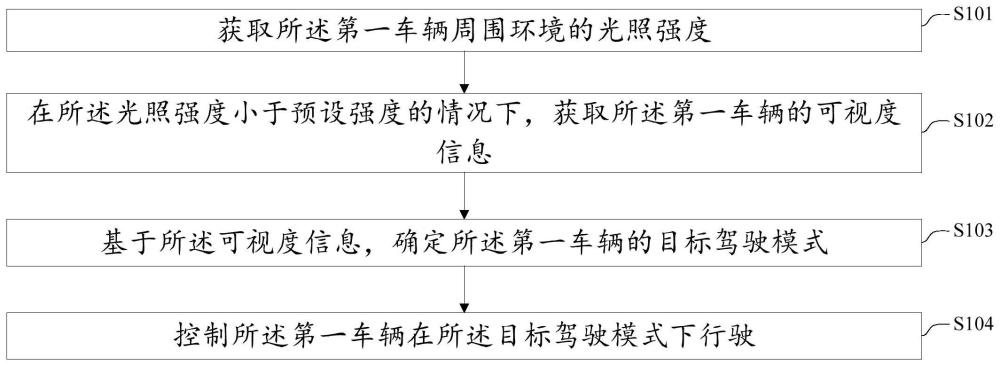
3、获取所述第一车辆周围环境的光照强度;
4、在所述光照强度小于预设强度的情况下,获取所述第一车辆的可视度信息;其中,所述可视度信息包括前照灯的工作状态和/或眩目信息,所述工作状态包括点亮状态、熄灭状态以及闪烁状态中的至少一者,所述眩目信息用于表征从所述第一车辆前方投射来的光线对驾驶员的眩目影响程度;
5、基于所述可视度信息,确定所述第一车辆的目标驾驶模式,所述目标驾驶模式包括自动驾驶模式和人工驾驶模式;
6、控制所述第一车辆在所述目标驾驶模式下行驶。
7、可选地,所述可视度信息包括所述工作状态,所述基于所述可视度信息,确定所述第一车辆的目标驾驶模式,包括:
8、在所述工作状态包括所述点亮状态的情况下,确定所述目标驾驶模式为所述人工驾驶模式;
9、在所述工作状态包括所述熄灭状态或所述闪烁状态的情况下,确定所述目标驾驶模式为所述自动驾驶模式。
10、可选地,所述可视度信息包括所述眩目信息,所述基于所述可视度信息,确定所述第一车辆的目标驾驶模式,包括:
11、在所述眩目信息指示所述眩目影响程度小于预设阈值的情况下,确定所述目标驾驶模式为所述人工驾驶模式;
12、在所述眩目信息指示所述眩目影响程度大于或等于所述预设阈值的情况下,确定所述目标驾驶模式为所述自动驾驶模式。
13、可选地,所述目标驾驶模式包括所述自动驾驶模式,所述控制所述第一车辆在所述目标驾驶模式下行驶,包括:
14、获取所述第一车辆周围的障碍物位置;
15、基于所述障碍物位置,确定第一行驶路线;
16、在控制所述第一车辆在所述第一行驶路线上行驶预设时长后,再次获取所述可视度信息;
17、基于再次获取的所述可视度信息,控制所述第一车辆行驶。
18、可选地,所述基于再次获取的所述可视度信息,控制所述第一车辆行驶,包括:
19、在再次获取的所述可视度信息符合预设条件的情况下,基于位于所述第一车辆周围的第二车辆的第二行驶路线,控制所述第一车辆停靠;
20、其中,所述预设条件包括所述工作状态为目标状态,和/或所述眩目信息指示所述眩目影响程度大于或等于预设阈值,所述目标状态包括所述熄灭状态或所述闪烁状态;
21、所述方法还包括:
22、在再次获取的所述可视度信息不符合所述预设条件的情况下,控制所述第一车辆启用所述人工驾驶模式,并输出提醒信息,以提示所述驾驶员接管所述第一车辆的驾驶。
23、可选地,所述控制所述第一车辆在所述目标驾驶模式下行驶,包括:
24、获取所述第一车辆的转向角以及当前所处位置的天气信息;
25、基于所述转向角以及所述天气信息,控制所述第一车辆的目标信号灯点亮,所述目标信号灯包括左转向指示灯、右转向指示灯以及雾灯中的至少一者。
26、可选地,所述控制所述第一车辆在所述目标驾驶模式下行驶,包括:
27、在所述目标驾驶模式为所述自动驾驶模式的情况下,禁止响应所述驾驶员输入的车辆控制信号;
28、其中,所述车辆控制信号包括加速控制信号、制动控制信号、转向指示灯控制信号、危险报警闪光灯控制信号、以及转向控制信号中的至少一者。
29、本申请实施例的第二方面,提供了一种车辆控制系统,所述系统应用于第一车辆,所述系统包括:
30、第一获取模块,用于获取所述第一车辆周围环境的光照强度;
31、第二获取模块,用于在所述光照强度小于预设强度的情况下,获取所述第一车辆的可视度信息;其中,所述可视度信息包括前照灯的工作状态和/或眩目信息,所述工作状态包括点亮状态、熄灭状态以及闪烁状态中的至少一者,所述眩目信息用于表征从所述第一车辆前方投射来的光线对驾驶员的眩目影响程度;
32、决策模块,用于基于所述可视度信息,确定所述第一车辆的目标驾驶模式,所述目标驾驶模式包括自动驾驶模式和人工驾驶模式;
33、执行模块,用于控制所述第一车辆在所述目标驾驶模式下行驶。
34、本申请实施例的第三方面,提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行实现本申请实施例第一方面所述车辆控制方法的步骤。
35、本申请实施例的第四方面,提供了一种车辆,包括本申请实施例第二方面所述车辆控制系统,或者包括控制模块,所述控制模块用于实现申请实施例第一方面所述车辆控制方法的步骤。
36、本申请提供了一种车辆控制方法、系统、存储介质及车辆,所述方法包括:获取所述第一车辆周围环境的光照强度;在所述光照强度小于预设强度的情况下,获取所述第一车辆的可视度信息;其中,所述可视度信息包括前照灯的工作状态和/或眩目信息,所述工作状态包括点亮状态、熄灭状态以及闪烁状态中的至少一者,所述眩目信息用于表征从所述第一车辆前方投射来的光线对驾驶员的眩目影响程度;基于所述可视度信息,确定所述第一车辆的目标驾驶模式,所述目标驾驶模式包括自动驾驶模式和人工驾驶模式;控制所述第一车辆在所述目标驾驶模式下行驶。
37、本申请在第一车辆所处环境的光照强度小于预设强度的情况下,对第一车辆包括前照灯的工作状态以及眩目信息在内的可视度信息进行获取,进而基于可视度信息,进一步从自动驾驶模式与人工驾驶模式中确定出目标驾驶模式,并控制第一车辆在目标驾驶模式下行驶。本申请所述的方法可以在夜晚等光照强度较低的情况下,通过可视度信息来确定第一车辆的目标驾驶模式,进而在驾驶员无法及时应对突发状况的情况下,通过自动驾驶模式来弥补驾驶员反应速度的不足,有效地保障了车辆的夜间行驶安全。
技术特征:
1.一种车辆控制方法,其特征在于,所述方法应用于第一车辆,所述方法包括:
2.根据权利要求1所述车辆控制方法,其特征在于,所述可视度信息包括所述工作状态,所述基于所述可视度信息,确定所述第一车辆的目标驾驶模式,包括:
3.根据权利要求1所述车辆控制方法,其特征在于,所述可视度信息包括所述眩目信息,所述基于所述可视度信息,确定所述第一车辆的目标驾驶模式,包括:
4.根据权利要求1所述车辆控制方法,其特征在于,所述目标驾驶模式包括所述自动驾驶模式,所述控制所述第一车辆在所述目标驾驶模式下行驶,包括:
5.根据权利要求4所述车辆控制方法,其特征在于,所述基于再次获取的所述可视度信息,控制所述第一车辆行驶,包括:
6.根据权利要求1所述车辆控制方法,其特征在于,所述控制所述第一车辆在所述目标驾驶模式下行驶,包括:
7.根据权利要求1所述车辆控制方法,其特征在于,所述控制所述第一车辆在所述目标驾驶模式下行驶,包括:
8.一种车辆控制系统,其特征在于,所述系统应用于第一车辆,所述系统包括:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1-7中任一项所述车辆控制方法的步骤。
10.一种车辆,其特征在于,包括权利要求8中所述的车辆控制系统,或者包括控制模块,所述控制模块用于实现权利要求1-7中任一项所述车辆控制方法的步骤。
技术总结
本申请提供了一种车辆控制方法、系统、存储介质及车辆,属于车辆技术领域,车辆控制方法包括:获取所述第一车辆周围环境的光照强度;在所述光照强度小于预设强度的情况下,获取所述第一车辆的可视度信息;基于所述可视度信息,确定所述第一车辆的目标驾驶模式,所述目标驾驶模式包括自动驾驶模式和人工驾驶模式;控制所述第一车辆在所述目标驾驶模式下行驶。本申请所述的方法可以在夜晚等光照强度较低的情况下,通过可视度信息来确定第一车辆的目标驾驶模式,进而在驾驶员无法及时应对突发状况的情况下,通过自动驾驶模式来弥补驾驶员反应速度的不足,有效地保障了车辆的夜间行驶安全。
技术研发人员:李永君,徐龙俊,刘红星,王旭
受保护的技术使用者:长城汽车股份有限公司
技术研发日:
技术公布日:2024/6/18
- 还没有人留言评论。精彩留言会获得点赞!