一种基于记忆路线自动规划泊车路线的方法及系统与流程
本申请涉及车辆辅助驾驶领域,具体涉及一种基于记忆路线自动规划泊车路线的方法及系统。
背景技术:
1、记忆泊车,全名停车场记忆泊车功能(valet parking assist),是在自动泊车功能的基础上,通过路线记忆、辅助驾驶等功能,实现更加全面、自动的停车场景应用。记忆泊车功能可分为两大部分,首先是学习泊车路线,首次使用,需驾驶员手动驾驶车辆行驶一遍停车路线,在地库或停车场门前进行记忆设定,并在泊车后完成“记忆路线”的完整过程。使用记忆泊车时,系统将会依据“记忆路线”辅助驾驶员将车辆从设定路线的起点,开往设定路线的终点,并泊入已被系统记忆的车位。
2、然而,如果要保证车辆按照记忆路线在道路上安全地行驶,就必须能够对行驶过程中遇到的商摊、石墩、行人和行驶的车辆等其他障碍物进行自主避障。现有的记忆泊车对于泊车过程中障碍物的处理不够完善,只是对于整条记忆路线的循迹跟踪,在发现记忆路线上存在障碍物时,车辆会马上停车,且无法根据不同的障碍物类型提供给车辆不同的躲避策略,方式不够灵活,给用户的体验感非常差。
技术实现思路
1、本申请提供一种基于记忆路线自动规划泊车路线的方法及系统,可以解决现有技术中存在的在发现记忆路线上存在障碍物时,车辆会马上停车,且无法根据不同的障碍物类型提供给车辆不同的躲避策略,方式不够灵活的技术问题。
2、第一方面,本申请实施例提供一种基于记忆路线自动规划泊车路线的方法,其特征在于,所述方法包括:
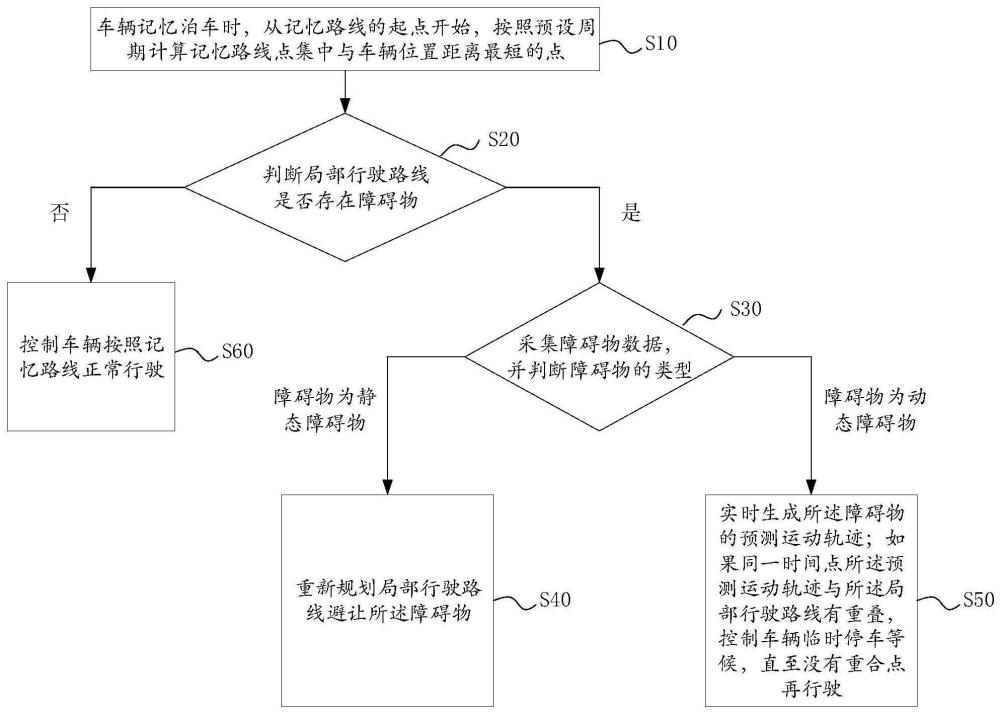
3、车辆记忆泊车时,从记忆路线的起点开始,按照预设周期计算记忆路线点集中与车辆位置距离最短的点;在记忆路线点集中,当所述距离最短的点与其向前第n个点之间的局部行驶路线存在障碍物时;若所述障碍物为静态障碍物,重新规划局部行驶路线避让所述障碍物;若所述障碍物为动态障碍物,实时生成所述障碍物的预测运动轨迹;如果同一时间点所述预测运动轨迹与所述局部行驶路线有重叠,控制车辆临时停车等候,直至没有重合点再行驶。
4、结合第一方面,在一种实施方式中,通过雷达判断所述局部行驶路线是否存在障碍物,若不存在障碍物,则控制车辆按照记忆路线行驶。
5、结合第一方面,在一种实施方式中,当局部行驶路线存在障碍物时,还包括步骤:
6、采集所述障碍物的图像数据;将采集的图像数据与预先存储的多种障碍物的存储图像数据进行匹配,选择相似度最高的存储图像数据所对应的障碍物的类型,作为采集的障碍物的类型,所述类型包括静态障碍物和动态障碍物。
7、结合第一方面,在一种实施方式中,所述重新规划所述局部行驶路线避让所述障碍物的步骤包括:
8、利用混合a*算法重新规划所述局部行驶路线,并控制车辆按照重新规划的局部行驶路线行驶。
9、结合第一方面,在一种实施方式中,所述生成所述障碍物的预测运动轨迹的步骤包括:
10、采集动态障碍物的移动速度、横向移动加速度和纵向移动加速度;根据所述动态障碍物的移动速度、横向移动加速度和纵向移动加速度确定未来各时间点动态障碍物的横向位移和纵向位移;基于未来各时间点动态障碍物的横向位移和纵向位移,生成动态障碍物的预测运动轨迹。
11、结合第一方面,在一种实施方式中,如果同一时间点所述预测运动轨迹与所述局部行驶路线没有重叠,所述车辆按照所述局部行驶路线行驶。
12、结合第一方面,在一种实施方式中,所述同一时间点所述预测运动轨迹与所述局部行驶路线重叠的判断方式包括:
13、基于所述障碍物的预测运动轨迹,得到所述障碍物各时间点的位置,根据车辆的纵向速度常数,计算车辆在局部行驶路线上各时间点的位置,判断同一时间点的障碍物的位置和车辆位置是否重叠。
14、结合第一方面,在一种实施方式中,控制车辆临时停车等候时,实时生成所述障碍物的预测运动轨迹,直至同一时间点所述预测运动轨迹与所述局部行驶路线没有重叠,车辆按照所述局部行驶路线行驶。
15、结合第一方面,在一种实施方式中,如果车辆临时停车时长大于预设时长,则输出用户接管信息。
16、第二方面,本申请实施例提供了一种基于记忆路线自动规划泊车路线的系统,所述系统包括:
17、计算模块,用于车辆记忆泊车时,从记忆路线的起点开始,按照预设周期计算记忆路线点集中与车辆位置距离最短的点;判断模块,用于在记忆路线点集中,判断所述距离最短的点与其向前第n个点之间的局部行驶路线存在障碍物;还用于在存在障碍物时,判断所述障碍物为静态障碍物还是动态障碍物;控制模块,用于当所述障碍物为静态障碍物时,重新规划局部行驶路线避让所述障碍物;还用于当所述障碍物为动态障碍物时,实时生成所述障碍物的预测运动轨迹;如果同一时间点所述预测运动轨迹与所述局部行驶路线有重叠,控制车辆临时停车等候,直至没有重合点再行驶。
18、本申请实施例提供的技术方案带来的有益效果包括:
19、通过车辆记忆泊车时,从记忆路线的起点开始,按照预设周期计算记忆路线点集中与车辆位置距离最短的点,这样能够更加准确地判断车辆位置和行驶方向,同时也可以增强路线调整灵活性;在记忆路线点集中,当所述距离最短的点与其向前第n个点之间的局部行驶路线存在障碍物时;若所述障碍物为静态障碍物,重新规划局部行驶路线避让所述障碍物;若所述障碍物为动态障碍物,实时生成所述障碍物的预测运动轨迹;如果同一时间点所述预测运动轨迹与所述局部行驶路线有重叠,控制车辆临时停车等候,直至没有重合点再行驶。因此,本发明在障碍物识别和避障方法没有滞后性,达到提前预测和提前进行躲避的效果,并且在发现记忆路线上存在障碍物时,车辆不会马上停车,而是根据不同的障碍物类型提供给车辆不同的躲避策略,方式灵活,提高用户的体验感。
技术特征:
1.一种基于记忆路线自动规划泊车路线的方法,其特征在于,所述方法包括:
2.如权利要求1所述的基于记忆路线自动规划泊车路线的方法,其特征在于,通过雷达判断所述局部行驶路线是否存在障碍物,若不存在障碍物,则控制车辆按照记忆路线行驶。
3.如权利要求1所述的基于记忆路线自动规划泊车路线的方法,其特征在于,当局部行驶路线存在障碍物时,还包括步骤:
4.如权利要求1所述的基于记忆路线自动规划泊车路线的方法,其特征在于,所述重新规划所述局部行驶路线避让所述障碍物的步骤包括:
5.如权利要求1所述的基于记忆路线自动规划泊车路线的方法,其特征在于,所述生成所述障碍物的预测运动轨迹的步骤包括:
6.如权利要求1所述的基于记忆路线自动规划泊车路线的方法,其特征在于,如果同一时间点所述预测运动轨迹与所述局部行驶路线没有重叠,所述车辆按照所述局部行驶路线行驶。
7.如权利要求1所述的基于记忆路线自动规划泊车路线的方法,其特征在于,所述同一时间点所述预测运动轨迹与所述局部行驶路线重叠的判断方式包括:
8.如权利要求1所述的基于记忆路线自动规划泊车路线的方法,其特征在于,控制车辆临时停车等候时,实时生成所述障碍物的预测运动轨迹,直至同一时间点所述预测运动轨迹与所述局部行驶路线没有重叠,车辆按照所述局部行驶路线行驶。
9.如权利要求8所述的基于记忆路线自动规划泊车路线的方法,其特征在于,如果车辆临时停车时长大于预设时长,则输出用户接管信息。
10.如权利要求1-9任意一项所述方法的基于记忆路线自动规划泊车路线的系统,其特征在于,所述系统包括:
技术总结
本发明公开一种基于记忆路线自动规划泊车路线的方法及系统,该方法包括:车辆记忆泊车时,从记忆路线的起点开始,按照预设周期计算记忆路线点集中与车辆位置距离最短的点;在记忆路线点集中,当所述距离最短的点与其向前第N个点之间的局部行驶路线存在障碍物时;若所述障碍物为静态障碍物,重新规划局部行驶路线避让所述障碍物;若所述障碍物为动态障碍物,实时生成所述障碍物的预测运动轨迹;如果同一时间点所述预测运动轨迹与所述局部行驶路线有重叠,控制车辆临时停车等候,直至没有重合点再行驶。通过本发明,车辆可以根据不同的障碍物类型提供给车辆不同的躲避策略,方式灵活,提高用户的体验感。
技术研发人员:刘会凯,曹佳腾,侯明洋
受保护的技术使用者:岚图汽车科技有限公司
技术研发日:
技术公布日:2024/7/4
- 还没有人留言评论。精彩留言会获得点赞!