一种工业车辆分布式电驱动转向桥与控制方法与流程
本发明涉及叉车电动转向的,具体地,涉及一种工业车辆分布式电驱动转向桥与控制方法。
背景技术:
1、叉车是当下工业仓储搬运车辆中的主要车型。目前,叉车转向系统中的左右拉杆式转向系统通常采用一推一拉的设计方式,左右拉杆的行程相同,在方向盘的带动下,两个转向轮的转动角度基本相等,此时两个轮子转弯路径的圆心不在同一个位置,导致两侧车轮偏转角误差较大,车轮容易发生滑移,增加轮胎磨损问题。
技术实现思路
1、本发明的目的是提供一种工业车辆分布式电驱动转向桥与控制方法,该工业车辆分布式电驱动转向桥的两侧车轮独立转向,通过对两侧车轮转向角度的独立调整,能够大幅减少轮胎磨损。
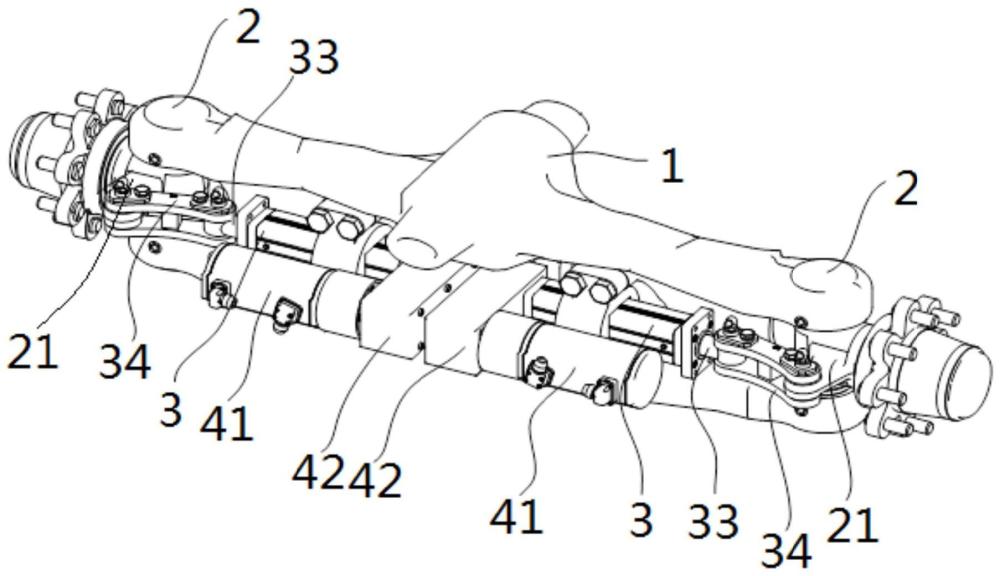
2、为了实现上述目的,本发明提供了一种工业车辆分布式电驱动转向桥,所述工业车辆分布式电驱动转向桥包括转向桥本体和分别设置于所述转向桥本体两侧的转向系统;
3、所述转向系统包括主销、推动机构和驱动机构,所述驱动机构驱动所述推动机构做伸缩运动,所述推动机构与所述主销连接推动所述主销旋转;
4、所述推动机构包括丝杆、螺母和与所述螺母固定连接的推动杆,所述推动杆与所述主销连接,所述丝杆与所述驱动机构连接
5、所述工业车辆分布式电驱动转向桥还包括控制系统,所述主销上设置有用于检测所述主销转动角度的角度传感器,所述控制系统与所述角度传感器和所述驱动机构电连接。
6、优选地,所述主销上设置有转向节臂,所述推动杆通过连杆与所述转向节臂连接。
7、优选地,所述驱动机构包括驱动电机和减速器,所述驱动电机连接至减速器的输入端,所述减速器的输出端与所述丝杆连接。
8、优选地,所述控制系统与所述驱动电机电连接以控制所述驱动电机的转动。
9、本发明还提供一种使用所述工业车辆分布式电驱动转向桥的转向控制方法,所述转向控制方法包括:
10、步骤一、所述角度传感器检测两个所述主轴的转角;
11、步骤二、控制系统确定内转向轮,并根据所述内转向轮的转动角度确定外转向轮的转动角度;
12、步骤三、根据步骤二的结果,控制系统驱动所述驱动电机转动。
13、优选地,步骤二中,所述内转向轮的转动角度设置为β,所述外转向轮的转动角度设置为α,则满足cotα-cotβ=胎距/轴距。
14、优选地,步骤二中,比较两个所述角度传感器的值,转动角度较大的所述主轴即对应于所述内转向轮。
15、根据上述技术方案,本发明的两个转向系统分别控制两个车轮,因此两个车轮能够独立动作实现转向。
16、驱动机构驱动推动机构的推动杆做伸缩运动,而推动杆与主销连接,推动杆的伸缩运动能够带动主销转动,进而带动车轮转向。
17、角度传感器可以检测主销的转动角度,并将转动角度的数值传输至控制系统。控制系统根据两个主销的不同转动角度判断哪个主销对应的是内转向轮,转角数值较大的主销对应于内转向轮。确定内转向轮后,控制系统根据设定的公式计算外转向轮的转角数值,并将该转角数值对应的驱动机构数据传输至驱动机构,使得驱动机构能够根据该数据驱动丝杆转动相应的圈数。
18、丝杆转动n圈,螺母就能够向水平方向移动n个螺距,对应地,就能够将主销2推动转动相应的角度。因此,将推动机构设置为丝杆螺母的结构能够有效的提高控制系统对主销控制的精度。
19、优选地,选择螺距更小一些的丝杆,则控制系统对主销的控制精度更高。
20、控制系统内设有cotα-cotβ=胎距/轴距,如图5所示,胎距指前后轮胎之间的距离m,轴距是指两个同轴的两个轮胎之间的距离l,当外转向轮转角α与内转向轮转角β满足cotα-cotβ=m/l时,就能够保证两个轮子转弯路径圆心在同一个位置,内外转向轮能指向同一个圆心,使得转弯时不易发生侧向滑移,能够大幅减少轮胎磨损。
21、当叉车生产完成投入使用后,m/l的值都是确定的,因此,当叉车进行转弯操作时,控制系统可以根据内转向轮的转角β的数值,求解出外转向轮转角α的数值,然后再根据驱动机构的减速比、丝杆的螺距等求解出对应于转角α数值的驱动电机的转动圈速。
22、因此,当叉车需要转向时,该工业车辆分布式电驱动转向桥能够根据角度传感器反馈的数据,顺利调整两个转向轮,使得两个转向轮转弯路径的圆心在同一个位置,即,内外转向轮能指向同一个圆心,使得转弯时不易发生侧向滑移,能够大幅减少轮胎磨损。
23、本发明的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种工业车辆分布式电驱动转向桥,其特征在于,所述工业车辆分布式电驱动转向桥包括转向桥本体(1)和分别设置于所述转向桥本体(1)两侧的转向系统;
2.根据权利要求1所述的工业车辆分布式电驱动转向桥,其特征在于,所述主销(2)上设置有转向节臂(21),所述推动杆(33)通过连杆(34)与所述转向节臂(21)连接。
3.根据权利要求1所述的工业车辆分布式电驱动转向桥,其特征在于,所述驱动机构包括驱动电机(41)和减速器(42),所述驱动电机(41)连接至减速器(42)的输入端,所述减速器(42)的输出端与所述丝杆(31)连接。
4.根据权利要求2所述的工业车辆分布式电驱动转向桥,其特征在于,所述控制系统与所述驱动电机(41)电连接以控制所述驱动电机(41)的转动。
5.一种使用权利要求3或4所述工业车辆分布式电驱动转向桥的转向控制方法,其特征在于,所述转向控制方法包括:
6.根据权利要求5所述转向控制方法,其特征在于,步骤二中,所述内转向轮的转动角度设置为β,所述外转向轮的转动角度设置为α,则满足cotα-cotβ=胎距/轴距。
7.根据权利要求5所述转向控制方法,其特征在于,步骤二中,比较两个所述角度传感器的值,转动角度较大的所述主轴即对应于所述内转向轮。
技术总结
本发明公开了一种工业车辆分布式电驱动转向桥,工业车辆分布式电驱动转向桥包括转向桥本体和分别设置于转向桥本体两侧的转向系统;转向系统包括主销、推动机构和驱动机构,驱动机构驱动推动机构做伸缩运动,推动机构与主销连接推动主销旋转;推动机构包括丝杆、螺母和与螺母固定连接的推动杆,推动杆与主销连接,丝杆与驱动机构连接工业车辆分布式电驱动转向桥还包括控制系统,主销上设置有用于检测主销转动角度的角度传感器,控制系统与角度传感器和驱动机构电连接。该工业车辆分布式电驱动转向桥的两侧车轮独立转向,通过对两侧车轮转向角度的独立调整,能够大幅减少轮胎磨损。
技术研发人员:郭康正,龙广成,常方坡,黄飞,刘海林
受保护的技术使用者:安徽合力股份有限公司
技术研发日:
技术公布日:2024/6/18
- 还没有人留言评论。精彩留言会获得点赞!