车辆跟踪方法、装置、车载控制终端及存储介质与流程
本发明涉及自动驾驶领域,尤其涉及一种车辆跟踪方法、装置、车载控制终端及存储介质。
背景技术:
1、车辆自动驾驶时,跟踪车辆选择是否准确决定了自适应巡航功能是否正确,当前自适应巡航跟踪车辆的选择主要考虑前车和自车之间的纵向距离,对于常见的切入/切出场景存在误刹或错误地跟随前车换道等情况,无法进行有效的改正,使得车辆无法正确的进行自动驾驶,从而威胁到乘车人员的安全。
技术实现思路
1、第一方面,本申请提供一种车辆跟踪方法,包括:
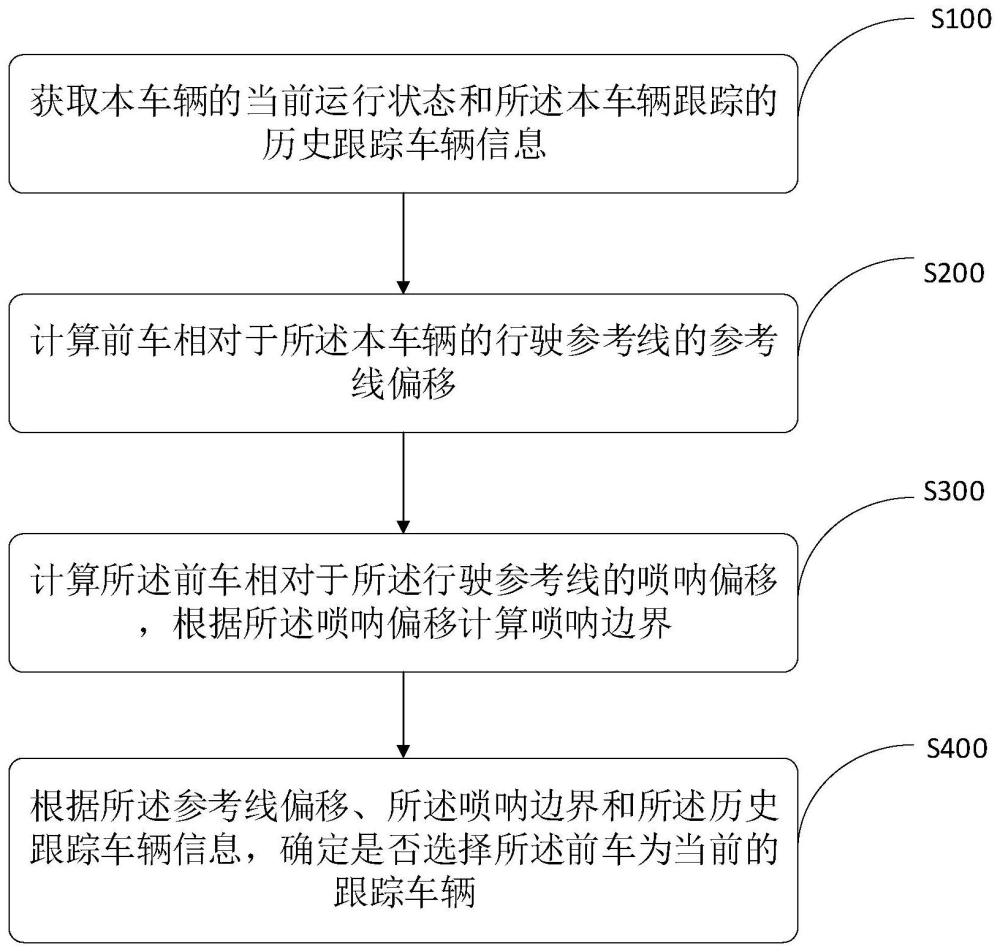
2、获取本车辆的当前运行状态和所述本车辆跟踪的历史跟踪车辆信息;
3、计算前车相对于所述本车辆的行驶参考线的参考线偏移;
4、计算所述前车相对于所述行驶参考线的唢呐偏移,根据所述唢呐偏移计算唢呐边界;
5、根据所述参考线偏移、所述唢呐边界和所述历史跟踪车辆信息,确定是否选择所述前车为当前的跟踪车辆。
6、进一步的,所述计算前车相对于所述行驶参考线的参考线偏移,包括:
7、获取所述本车辆的车道线数据,若车道线数据可用则进一步获取行驶参考线;
8、确定所述前车的位置信息,将所述前车的位置信息带入所述行驶参考线的表达式中,计算得到对应的参考线偏移。
9、进一步的,所述计算前车相对于所述行驶参考线的参考线偏移,还包括:
10、若所述车道线数据不可用,则获取所述本车辆的运动数据;
11、根据所述运动数据,计算所述行驶参考线的曲率,根据所述前车的位置信息和所述曲率计算对应的参考线偏移。
12、进一步的,所述根据所述运动数据,计算所述行驶参考线的曲率,包括:
13、通过所述本车辆的速度和横摆角速度计算所述行驶参考线的第一曲率;
14、通过二自由度模型计算所述行驶参考线的第二曲率;
15、根据所述本车辆的速度确定所述行驶参考线的实际曲率。
16、进一步的,所述根据所述前车的位置信息和所述曲率计算对应的参考线偏移,包括:
17、通过偏移计算表达式计算所述参考线偏移,所述偏移计算表达式为:
18、offset=y-c*x2;
19、式中,offset为所述参考线偏移,y为所述前车在所述本车辆的坐标系下的横向距离,x表示所述前车在所述本车辆的坐标系下的纵向距离,c为所述曲率。
20、进一步的,所述计算所述前车相对于所述行驶参考线的唢呐偏移,根据所述唢呐偏移计算唢呐边界,包括:
21、通过预先存储的唢呐纵向距离表,根据所述前车的纵向距离获取所述前车的纵向距离在所述唢呐纵向距离表的位置以及插值系数;
22、根据所述位置以及所述插值系数计算唢呐偏移系数,在根据所述唢呐偏移系数和当前车道宽度,计算所述前车相对于所述本车辆的唢呐偏移,再根据所述唢呐偏移和所述行驶参考线计算唢呐边界。
23、进一步的,所述根据所述参考线偏移、所述唢呐边界和所述历史跟踪车辆信息,确定是否选择所述前车为当前的跟踪车辆,包括:
24、根据所述参考线偏移确定所述前车是否在所述行驶参考线的范围内,并确定所述前车纵向距离是否小于所述历史跟踪车辆的纵向距离;
25、若所述前车在所述行驶参考线的范围内,且所述前车纵向距离小于所述历史跟踪车辆的纵向距离,则确定所述前车为跟踪车辆,否则跟踪所述历史跟踪车辆。
26、第二方面,本申请还提供一种车辆跟踪装置,包括:
27、采集模块,用于获取本车辆的当前运行状态和所述本车辆跟踪的历史跟踪车辆信息;
28、计算模块,用于计算前车相对于所述本车辆的行驶参考线的参考线偏移;
29、偏移模块,用于计算所述前车相对于所述行驶参考线的唢呐偏移,根据所述唢呐偏移计算唢呐边界;
30、判断模块,用于根据所述参考线偏移、所述唢呐边界和所述历史跟踪车辆信息,确定是否选择所述前车为当前的跟踪车辆。
31、第三方面,本申请提供一种车载控制终端,包括处理器和存储器,所述存储器存储有计算机程序,所述计算机程序在所述处理器上运行时执行所述的车辆跟踪方法。
32、第四方面,本申请提供一种可读存储介质,其存储有计算机程序,所述计算机程序在处理器上运行时执行所述的车辆跟踪方法。
33、本发明公开了一种车辆跟踪方法、装置、车载控制终端及存储介质。所述方法包括:获取本车辆的当前运行状态和历史跟踪车辆信息;计算前车相对于所述本车辆的行驶参考线的参考线偏移;计算所述前车相对于所述行驶参考线的唢呐偏移,根据所述唢呐偏移计算唢呐边界;根据所述参考线偏移、所述唢呐边界和所述历史跟踪车辆信息,确定所述前车是否为跟踪车辆。解决了前车切入/切出时误刹和错误跟随问题,增强了自动驾驶的稳定性。
技术特征:
1.一种车辆跟踪方法,其特征在于,包括:
2.根据权利要求1所述的车辆跟踪方法,其特征在于,所述计算前车相对于所述行驶参考线的参考线偏移,包括:
3.根据权利要求1所述的车辆跟踪方法,其特征在于,所述计算前车相对于所述行驶参考线的参考线偏移,还包括:
4.根据权利要求3所述的车辆跟踪方法,其特征在于,所述根据所述运动数据,计算所述行驶参考线的曲率,包括:
5.根据权利要求3所述的车辆跟踪方法,其特征在于,所述根据所述前车的位置信息和所述曲率计算对应的参考线偏移,包括:
6.根据权利要求1所述的车辆跟踪方法,其特征在于,所述计算所述前车相对于所述行驶参考线的唢呐偏移,根据所述唢呐偏移计算唢呐边界,包括:
7.根据权利要求1所述的车辆跟踪方法,其特征在于,所述根据所述参考线偏移、所述唢呐边界和所述历史跟踪车辆信息,确定是否选择所述前车为当前的跟踪车辆,包括:
8.一种车辆跟踪装置,其特征在于,包括:
9.一种车载控制终端,其特征在于,包括处理器和存储器,所述存储器存储有计算机程序,所述计算机程序在所述处理器上运行时执行权利要求1至7中任一项所述的车辆跟踪方法。
10.一种可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序在处理器上运行时执行权利要求1至7中任一项所述的车辆跟踪方法。
技术总结
本发明涉及自动驾驶领域,尤其涉及一种车辆跟踪方法、装置、车载控制终端及存储介质。所述方法包括:获取本车辆的当前运行状态和历史跟踪车辆信息;计算前车相对于所述本车辆的行驶参考线的参考线偏移;计算所述前车相对于所述行驶参考线的唢呐偏移,根据所述唢呐偏移计算唢呐边界;根据所述参考线偏移、所述唢呐边界和所述历史跟踪车辆信息,确定所述前车是否为跟踪车辆。解决了前车切入/切出时误刹和错误跟随问题,增强了自动驾驶的稳定性。
技术研发人员:阙秋根,何天翼
受保护的技术使用者:江苏北斗星通汽车电子有限公司
技术研发日:
技术公布日:2024/8/16
- 还没有人留言评论。精彩留言会获得点赞!