车辆的控制装置、车辆的控制方法及非瞬时性的计算机记录介质与流程
本发明涉及车辆的控制装置、车辆的控制方法及非瞬时性的计算机记录介质。
背景技术:
1、在专利文献1中,作为能够根据驾驶员的注视状况进行告知的以往的警报装置,公开了如下的警报装置,其配置成,基于表示驾驶员的视线的方向的视线信息和表示驾驶员的三维坐标上的眼球位置的眼球位置信息计算驾驶员正在注视的注视点,基于应注视的对象物和注视点判定驾驶员是否正在注视对象物,在判定为未在注视的情况下进行告知。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2019-185218号公报
技术实现思路
1、发明要解决的课题
2、驾驶员的视野具有车辆的速度越大则其越窄的倾向。因而,驾驶员具有车辆的速度越大则越难以识别车辆外部的其他车辆、行人等目标物的倾向。因此,若不考虑这样的视野范围的变化地、判断驾驶员是否成功识别到车辆外部的目标物,则有可能尽管驾驶员未能识别到车辆外部的应注视的目标物却判断为驾驶员成功识别到该目标物。
3、本发明是着眼于这样的问题点而完成的,目的在于使得能够考虑驾驶员的视野范围的变化来实施该驾驶员是否识别到车辆外部的目标物的判断。
4、用于解决课题的手段
5、本公开的主旨如下。
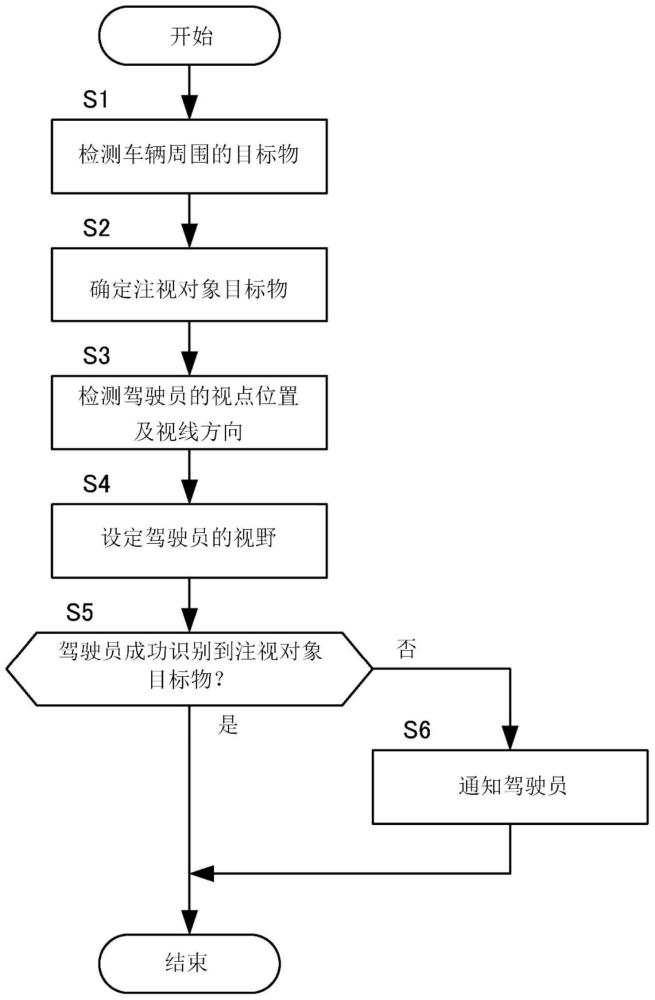
6、(1)一种车辆的控制装置,其配置成,基于表示车辆的周边的状况的周边数据,检测存在于车辆的周围的应注视的目标物,基于表示车辆的驾驶员的状态的驾驶员数据,检测驾驶员的视点位置及视线方向,基于车辆的速度、道路类别或道路形状,朝向驾驶员的视线方向设定驾驶员的视野,在目标物的位置,以与车辆相对的方式,设定目标物所投影到的虚拟平面,并且判定在虚拟平面上驾驶员的视野是否与目标物的投影部位重叠,若驾驶员的视野未与目标物的投影部位重叠,则采取安全措施。
7、(2)根据上述(1)记载的车辆的控制装置,其中,将以驾驶员的视点位置为顶点、并以从视点位置朝向视线方向延伸的视线向量为中心轴的、具有规定的顶角的锥体设定为驾驶员的视野,并且基于车辆的速度、道路类别或道路形状变更顶角。
8、(3)根据上述(2)记载的车辆的控制装置,其中,在车辆的速度大时,与车辆的速度小时相比,将顶角设定为较小的值。
9、(4)根据上述(2)记载的车辆的控制装置,其中,在道路类别是平均车速大的道路时,与道路类别是平均车速小的道路时相比,将顶角设定为较小的值。
10、(5)根据上述(2)记载的车辆的控制装置,其中,在道路形状是能够相对高速地行驶的形状时,与道路形状是需要相对低速地行驶的形状时相比,将顶角设定为较小的值。
11、(6)根据上述(1)至(5)中的任一项记载的车辆的控制装置,其中,车辆具有用于对驾驶员进行通知的输出设备,控制装置配置成,作为安全措施,经由输出设备进行通知。
12、(7)根据上述(1)至(6)中的任一项记载的车辆的控制装置,其中,控制装置配置成,作为安全措施,以避开目标物的方式自动实施车辆的驾驶操作。
13、(8)一种车辆的控制方法,其是基于控制装置的车辆的控制方法,基于表示车辆的周边的状况的周边数据检测存在于车辆的周围的应注视的目标物,基于表示车辆的驾驶员的状态的驾驶员数据检测驾驶员的视点位置及视线方向,基于车辆的速度、道路类别或道路形状,朝向驾驶员的视线方向设定驾驶员的视野,在目标物的位置,以与车辆相对的方式,设定目标物所投影到的虚拟平面,并且判定在虚拟平面上驾驶员的视野是否与目标物的投影部位重叠,若驾驶员的视野未与目标物的投影部位重叠,则采取安全措施。
14、(9)一种非瞬时性的计算机记录介质,其包含车辆的控制装置用的计算机程序,该计算机程序用于使控制装置执行:基于表示车辆的周边的状况的周边数据检测存在于车辆的周围的应注视的目标物,基于表示驾驶员的状态的驾驶员数据检测驾驶员的视点位置及视线方向,基于车辆的速度、道路类别或道路形状,朝向驾驶员的视线方向设定驾驶员的视野,在目标物的位置,以与车辆相对的方式,设定目标物所投影到的虚拟平面,并且判定在虚拟平面上驾驶员的视野是否与目标物的投影部位重叠,若驾驶员的视野未与目标物的投影部位重叠,则使车辆采取安全措施。
15、发明效果
16、根据本发明的这些方式,能够将驾驶员的视野设定为与车辆的速度、道路类别或道路形状相应的合适的范围,所以能够考虑驾驶员的视野范围的变化来实施驾驶员是否识别到车辆外部的目标物的判断。
技术特征:
1.一种车辆的控制装置,其配置成,
2.根据权利要求1所述的车辆的控制装置,其配置成,
3.根据权利要求2所述的车辆的控制装置,其配置成,
4.根据权利要求2所述的车辆的控制装置,其配置成,
5.根据权利要求2所述的车辆的控制装置,其配置成,
6.根据权利要求1至5中任一项所述的车辆的控制装置,其中,
7.根据权利要求1至6中任一项所述的车辆的控制装置,其配置成,
8.一种车辆的控制方法,其是基于控制装置的车辆的控制方法,构成为,
9.一种非瞬时性的计算机记录介质,其包含车辆的控制装置用的计算机程序,
技术总结
使得能够考虑驾驶员的视野范围的变化来实施驾驶员是否识别到车辆外部的目标物的判断。控制装置(4)配置成,基于表示车辆(100)的周边的状况的周边数据,检测存在于车辆(100)的周围的应注视的目标物,基于表示车辆(100)的驾驶员的状态的驾驶员数据,检测驾驶员的视点位置及视线方向,基于车辆(100)的速度、道路类别或道路形状,朝向驾驶员的视线方向设定驾驶员的视野,在目标物的位置,以与车辆相对的方式,设定目标物所投影到的虚拟平面,并且判定在虚拟平面上驾驶员的视野是否与目标物的投影部位重叠,若驾驶员的视野未与目标物的投影部位重叠,则采取安全措施。
技术研发人员:原健一郎,藤野次郎,川上悟,森本寛,山田健太
受保护的技术使用者:丰田自动车株式会社
技术研发日:
技术公布日:2024/11/14
- 还没有人留言评论。精彩留言会获得点赞!