控制装置的制作方法
本发明涉及一种能够执行对移动体所行驶的车道进行变更的车道变更控制的控制装置。
背景技术:
1、近年来,提供通向也考虑到在交通参与者中处于脆弱立场的人们的可持续的运输系统的努力正在活跃化。为了实现该目标,将重点放在通过与驾驶辅助技术和自动驾驶技术相关的研究开发进一步改善交通的安全性、便利性的研究开发上。作为驾驶辅助技术和自动驾驶技术的一个例子,在专利文献1、专利文献2中公开了部分地或者完全地自动控制车辆的车道变更的自动车道变更(alc:auto lane change)技术。
2、在自动车道变更技术中,考虑到安全性,在进行车道变更之前有时会设置用于驾驶员确认车辆的周边的时间(以下,也称为周边确认时间)。专利文献1所记载的自动驾驶系统根据车辆的驾驶环境进行使车道变更的实际开始时机从基准时机延迟的控制,驾驶员能够在延迟时间内确认车辆的周边。
3、现有技术文献
4、专利文献
5、专利文献1:日本专利第6576492号公报
6、专利文献2:日本专利第5825239号公报
技术实现思路
1、发明要解决的课题
2、在以往的自动车道变更技术中,根据车道变更的方向,驾驶员有可能无法在周边确认时间内充分地对车辆的周边进行确认。另外,可以想象一律延长周边确认时间,使得无论车道变更的方向如何,驾驶员都可以充分地对车辆的周边进行确认,但这会减少执行车道变更的机会。
3、本发明提供一种控制装置,其能够在车道变更的任一方向上都充分地确保周边确认时间,且能够抑制车道变更的执行机会的减少。其进而有助于可持续的运输系统的发展。
4、用于解决课题的方案
5、本发明为涉及一种控制装置,其能够执行对移动体所行驶的车道进行变更的车道变更控制,其中,
6、所述控制装置具备:
7、识别部,其识别所述移动体的周边状况;
8、车道变更判定部,其基于由所述识别部识别出的所述周边状况,来判定可否执行所述车道变更控制;
9、行驶控制部,其在由所述车道变更判定部判定为能够执行所述车道变更控制的情况下,执行所述车道变更控制;以及
10、通知控制部,其经由搭载于所述移动体的通知装置,向所述移动体的乘员进行规定的通知,
11、所述通知控制部在由所述车道变更判定部判定为能够执行所述车道变更控制的情况下,向所述移动体的乘员通知开始所述车道变更控制这一情况,
12、所述行驶控制部在从所述通知控制部开始通知时起经过了规定时间之后,开始所述车道变更控制,
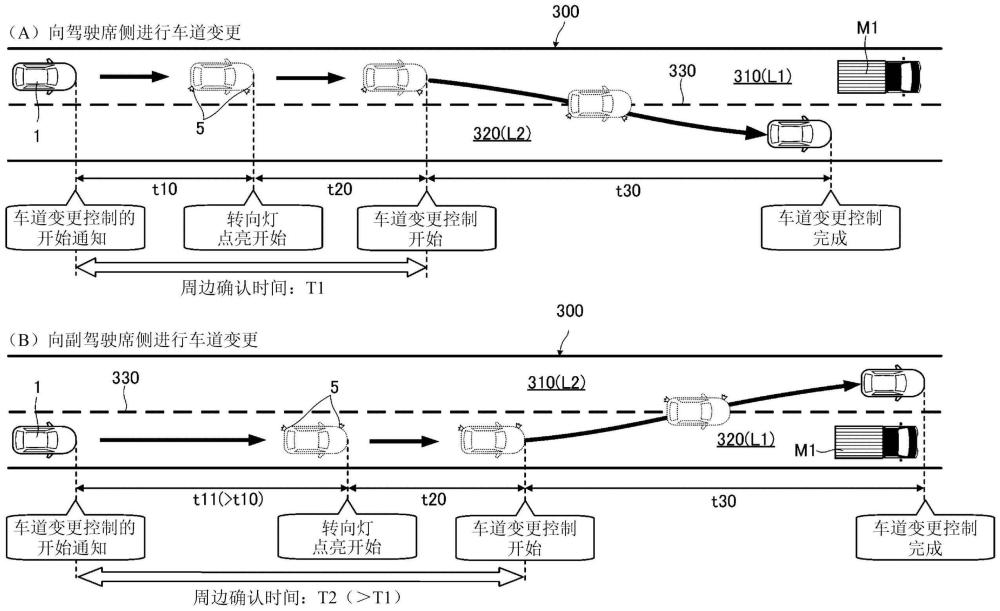
13、所述规定时间根据通过所述车道变更控制进行的所述移动体的车道变更的方向而不同。
14、发明效果
15、根据本发明,能够在车道变更的任一方向上都充分地确保周边确认时间,且能够抑制车道变更的执行机会的减少。
技术特征:
1.一种控制装置,其能够执行对移动体所行驶的车道进行变更的车道变更控制,其中,
2.根据权利要求1所述的控制装置,其中,
3.根据权利要求2所述的控制装置,其中,
4.根据权利要求3所述的控制装置,其中,
5.根据权利要求4所述的控制装置,其中,
6.根据权利要求1至5中任一项所述的控制装置,其中,
7.根据权利要求1至5中任一项所述的控制装置,其中,
8.根据权利要求1至5中任一项所述的控制装置,其中,
9.根据权利要求1至5中任一项所述的控制装置,其中,
技术总结
提供一种控制装置,其能够在车道变更的任一方向上都充分地确保周边确认时间,且能够抑制车道变更的执行机会的减少。车辆(1)的控制装置(100)具备:识别部(111),其识别周边状况;车道变更判定部(113),其基于周边状况来判定可否执行车道变更控制;行驶控制部(130),其在判定为能够执行车道变更控制的情况下,执行车道变更控制;以及通知控制部(124),其在判定为能够执行车道变更控制的情况下,向乘员通知车道变更控制的开始这一情况。行驶控制部(130)在从通知控制部(124)开始通知时起经过了规定时间之后,开始车道变更控制。规定时间根据通过车道变更控制进行的车辆(1)的车道变更的方向而不同。
技术研发人员:广泽望,寺町知峰
受保护的技术使用者:本田技研工业株式会社
技术研发日:
技术公布日:2024/11/26
- 还没有人留言评论。精彩留言会获得点赞!