基于MFAPC的乘用车空气悬架系统高度控制方法
本发明属于乘用车电控空气悬架系统领域,特别涉及一种基于mfapc的乘用车空气悬架系统高度控制方法。
背景技术:
1、高级乘用车电控空气悬架系统(electronic-controlled air suspension,简称ecas)一般包括电子控制单元ecu、空气弹簧、空气压缩机、电磁阀、车身高度和加速度传感器等部件。
2、车身高度和加速度传感器分别负责检测车身高度和加速度的变化信息,ecu通过输入各传感器信号,结合相关的高度控制算法,输出电磁阀控制信号,通过电磁阀实现空气压缩机对空气弹簧的充放气调节,从而实现高度调控。
3、由于空气悬架系统存在强非线性、建模不精确性以及参数时变性等问题,其相关建模理论和高度控制方法成为研究难点与热点。
4、预测控制是目前除pid控制外在实际控制系统中应用最广的控制方法,具有控制效果好和鲁棒性强等优点,但仍要求受控系统模型或结构已知,模型的精确度直接影响控制效果,并且对于预测控制的理论研究多是针对线性系统提出,对于非线性系统预测控制方法还需要进一步深入研究。
5、无模型自适应控制(model free adaptive control,mfac)的基本思想是将控制系统的动力学模型转化为等价的动态线性化数据模型,然后基于该数据模型进行控制系统设计和分析,
6、该方法突出特点是其控制系统的设计和分析仅与系统的i/o数据有关。
7、对于空气悬架系统,研究综合利用预测控制和无模型自适应控制各自优点的无模型自适应预测控制(model free adaptive predictive control,mfapc),即研究仅利用闭环系统i/o数据的非线性系统的预测控制方法,实现对无法获取精确数学模型的系统的控制,无论在理论上还是实际应用中都具有重大意义。
技术实现思路
1、本发明的目的在于提供一种基于mfapc的乘用车空气悬架系统高度控制方法,其使用mfapc方法进行高度控制,结合动态线性化方法,给出仅利用受控系统输入输出数据,且计算负担小的mfapc方案。
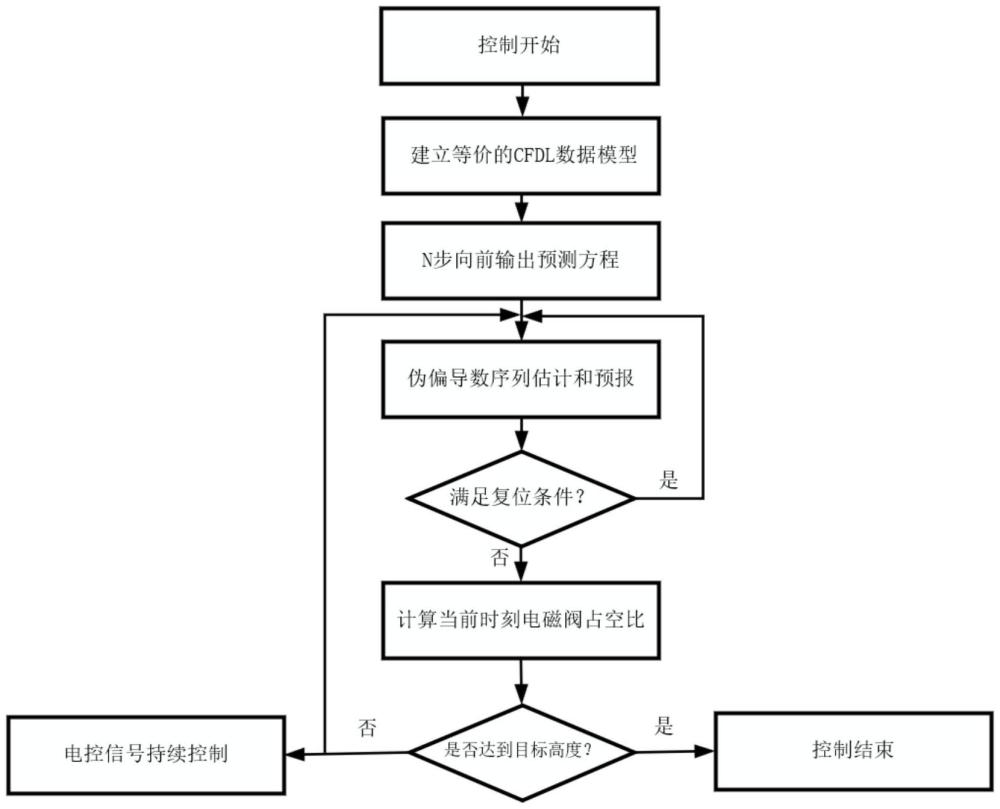
2、一种基于mfapc的乘用车空气悬架系统高度控制方法,包括以下步骤:
3、步骤1、分析乘用车空气悬架系统,建立等价的cfdl数据模型;
4、δy(k+1)=φc(k)δu(k)
5、其中,φc(k)为基于空气悬架系统的输入输出数据的伪偏导数;
6、δu(k)为k时刻空气悬架系统的输入增量;
7、δy(k+1)为k+1时刻空气悬架系统的输出增量;
8、步骤2、基于cfdl数据模型,建立针对n步向前输出预测方程yn(k+1);
9、
10、步骤3、选取伪偏导数估计算法和预报算法,以求解a1(k);
11、步骤4、计算出当前时刻控制输入u(k),具体包括以下步骤:
12、步骤41、建立当前时刻的控制输入模型:
13、
14、其中,u(k)为k时刻的控制输入;
15、u(k-1)为k-1时刻的控制输入;
16、为k时刻的控制时域内的控制输入增量向量;
17、步骤42、求解k时刻的控制时域内的控制输入增量向量
18、
19、g=[1,0,...,0]t
20、步骤43、将步骤3求解出的a1(k)带入步骤42中求解出的之后将步骤42中求解出的带入步骤41中的模型,求解出当前时刻控制输入u(k);
21、步骤5、判断控制循环是否结束;若当前高度y(k)达到目标高度的精度要求,则控制结束;若未结束,则进行步骤6;
22、步骤6、将计算出的当前时刻控制输入u(k),作用于空气弹簧对应的电磁阀,获取高度y(k+1);之后执行步骤3,继续进行伪偏导数序列的迭代计算。
23、优选地,步骤3具体包括以下步骤:
24、采用改进投影算法求解伪偏导数φc(k)的估计值之后,令
25、
26、其中,μ>0,μ是权重因子;
27、η是步长因子,0<η≤1;
28、采用预报算法计算φc(k+j),具体包括以下步骤:
29、步骤31、建立估计序列所满足的自回归模型
30、
31、步骤32、基于建立预测算法模型并求解
32、预测算法模型为:
33、
34、
35、其中,j=1,…,nu-1;
36、θ(k)的求解公式为:
37、
38、
39、其中,δ是一个正数;np为预测阶数。
40、优选地,np取值为3;η=1;
41、优选地,θ(3)=[0.4,0.3,0.6]t。
42、优选地,步骤2具体包括以下步骤:
43、步骤21、建立n步向前预测方程yn(k+1):
44、yn(k+1)=e(k)y(k)+a(k)δun(k)
45、
46、yn(k+1)=[y(k+1),…,y(k+n)]t
47、δun(k)=[δu(k),…,δu(k+n-1)]t
48、e(k)=[1,1,...,1]t
49、其中,yn(k+1)-系统输出的n步向前预报向量;δun(k)-控制输入增量向量;
50、步骤22、将yn(k+1)转换至控制时域内。
51、
52、
53、yn(k+1)=[y(k+1),…,y(k+n)]t
54、其中,nu是控制时域常数;
55、
56、优选地,所述乘用车空气悬架系统包括依次连接的气源、电磁阀和空气弹簧。
57、与现有技术相比,本发明的优点为:
58、1、将目前除了pid控制以外的、在实际系统控制中应用较广泛的控制方法—预测控制,与仅利用模型输入输出数据驱动的无模型自适应控制算法结合起来,作为乘用车空气悬架这种强非线性系统的高度控制方法。
59、2、mfapc控制器的设计仅利用了系统的一些历史输入输出数据,实现了对无法获取较精确数学模型的非线性系统的数据驱动预测控制,提高了控制性能并且具有很好的工程实用价值。
技术特征:
1.一种基于mfapc的乘用车空气悬架系统高度控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于mfapc的乘用车空气悬架系统高度控制方法,其特征在于,步骤3具体包括以下步骤:
3.根据权利要求1所述的基于mfapc的乘用车空气悬架系统高度控制方法,其特征在于,np取值为3;η=1;
4.根据权利要求1所述的基于mfapc的乘用车空气悬架系统高度控制方法,其特征在于,θ(3)=[0.4,0.3,0.6]t。
5.根据权利要求1所述的基于mfapc的乘用车空气悬架系统高度控制方法,其特征在于,步骤2具体包括以下步骤:
6.根据权利要求1所述的基于mfapc的乘用车空气悬架系统高度控制方法,其特征在于,所述乘用车空气悬架系统包括依次连接的气源、电磁阀和空气弹簧。
技术总结
本发明提出了一种基于MFAPC的乘用车空气悬架系统高度控制方法,包括以下步骤:步骤1、分析乘用车空气悬架系统,建立等价的CFDL数据模型;步骤2、基于CFDL数据模型,建立针对N步向前输出预测方程;步骤3、选取伪偏导数估计算法和预报算法,求解A<subgt;1</subgt;(k);步骤4、计算出当前时刻控制输入u(k);步骤5、判断控制循环是否结束,若未结束,则进行步骤6;步骤6、将计算出的当前时刻控制输入u(k),作用于空气弹簧对应的电磁阀,之后执行步骤3。本发明结合动态线性化方法以及预测控制的优点,给出仅利用受控系统输入输出数据,且计算负担小、鲁棒性更强的MFAPC方案。
技术研发人员:吴光强,姚霁洋,吴健,冯聪,杨雨辰,鞠丽娟
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/7/11
- 还没有人留言评论。精彩留言会获得点赞!